
英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
一种基于模糊逻辑控制的起动-发动机并联混合动力汽车的最佳转矩分配策略
摘要:本文提出了一种通过模糊逻辑控制实现内燃机与电动机之间最优转矩分配的多能量管理控制策略的系统设计方法。整车控制器作为混合动力汽车“大脑”用于接收车辆信息,例如加速和制动踏板信号,发动机转速以及电池组的绝对充电状态作为输入,并直接发送转矩命令来控制电动机和发动机节气门开度指令柴油机。而模糊控制逻辑由三个部分组成来实现插值机制:梯形隶属函数,Mamdani模糊推理规则和以重心法作为去模糊方法。还采用了一种能够模糊化车辆转矩需求的新技术,可以实现点对点优化,并将130多个规则并划分为4个子规则库。其硬件在环仿真结果表明集成式起动机-发电机混合动力系统的效率得到了极大的提高,并且燃油经济性优于默认基于规则的控制策略。
关键词:混合动力汽车,集成式起动-发电机,转矩分配,模糊逻辑控制,最优控制
- 绪论
近年来,能源危机与环境问题迫使汽车行业去寻找更加清洁以及比“常规”车辆更高效的新型车辆。燃料电池电动汽车和纯电动汽车是所谓的零排放汽车[1],但其潜力受到燃料电池和蓄电池技术的限制。而混合动力汽车(HEV)可以和柴油机产生电能协同作用,并已经被证明其总体效率与使用化石燃料的燃料电池一样高[2,3]。因此,不论从短期和长期来看,混合动力技术都是最有前途和最实用的非传统动力总成。
混合动力汽车在很大程度上依靠多种能源管理策略来实现中国国家高技术发展计划(通常称为863计划)提出的燃油经济性目标。此目标是指在不牺牲性能,质量和成本的前提下,将燃油经济性提高至比传统车辆高20-30%。在多能量控制策略应用中,基本上有三种类型的数学方法应用:map和
Boolean逻辑方法[4],最佳方法[5、
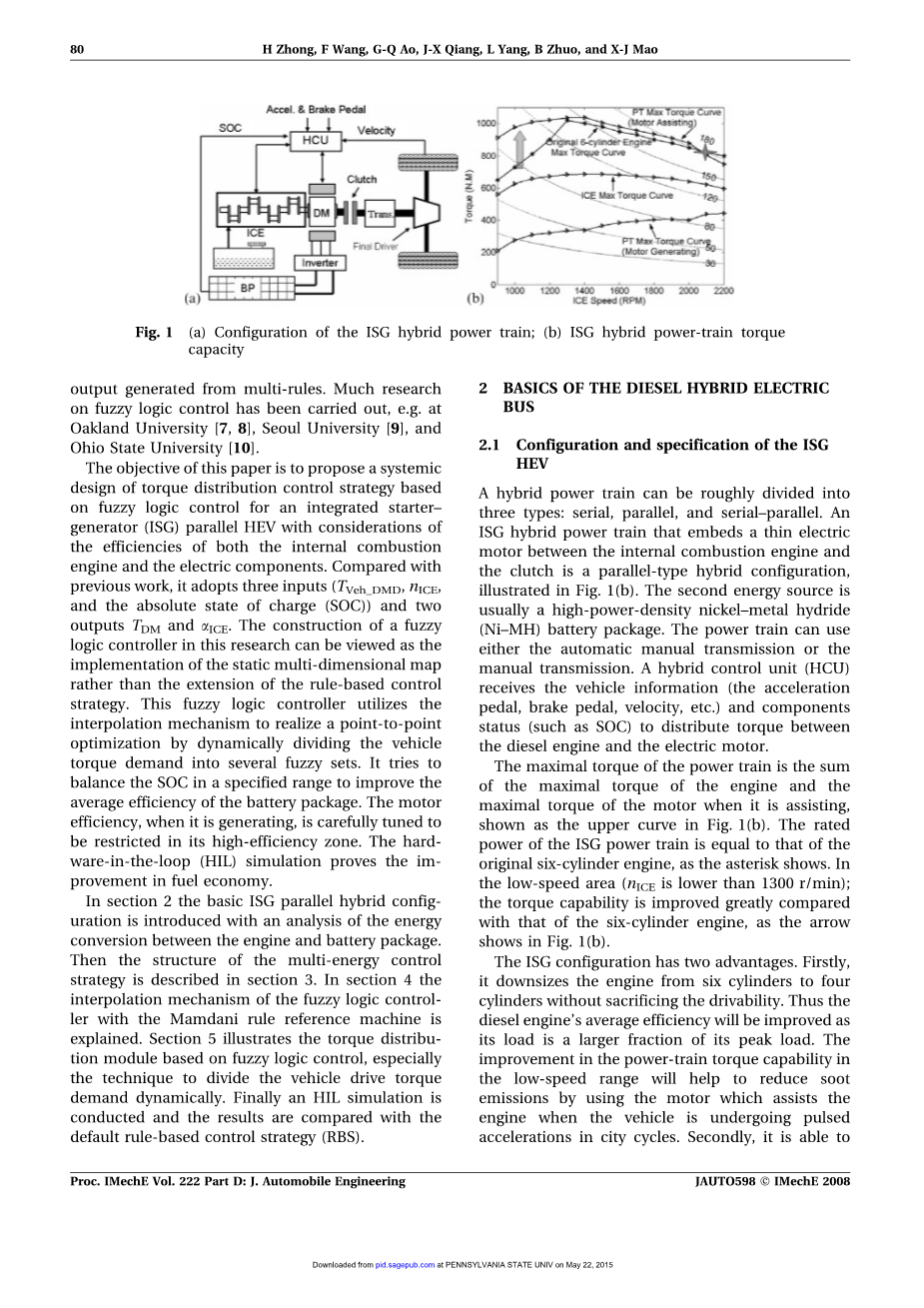
图1 (a)ISG混合动力总成结构图 (b)ISG混合动力总成转矩容量
6]和智能方法例如模糊逻辑[7-10]和遗传算法[11]。只有基于规则的控制和基于模糊的控制才有意义,因为这两种方法快速且具有鲁棒性,还可以满足混合动力汽车的实时转矩分配要求。模糊逻辑控制器由于其计算简单而具有快速性,由于可以容忍测量中的不准确性和组件的变化而具有鲁棒性。其具有优于基于规则的控制器的控制效果,因为其具有从多规则生成的更精确的输出。而关于模糊逻辑控制的许多研究已经在进行了,例如:在奥克兰大学[7,8],首尔大学[9]和俄亥俄州立大学[10]。
本文的目的是提出一种适用于集成式起动机-发电机(ISG)并联式混合动力汽车基于模糊逻辑控制的转矩分配控制策略的系统设计,其同时考虑了内燃机和电气部件的效率。与以前的系统相比,其采用了三个参数输入(,和绝对电荷状态(SOC))以及两个参数输出和。并且模糊逻辑控制器的构建可以看作是静态多维映射的实现,而不是基于规则的控制策略的扩展。它利用插值机制通过将车辆转矩需求动态划分为几个模糊集来实现点对点优化。其尝试在指定范围内平衡SOC,以提高电池组的平均效率。电动机在发电时的效率则经过精心调整,以限制在其高效率区域。硬件在环(HIL)仿真也证明了其燃油经济性的提高。
在第2节中,本文介绍了基本的ISG并联混合动力配置,并分析了发动机和电池组之间的能量转换。在第3节中介绍了多能量控制策略的结构。在第4节中,说明基于Mamdani规则推理法的模糊逻辑控制器的内插机制。在第5节说明了基于模糊逻辑控制的转矩分配模块,特别是动态分配车辆驱动转矩需求的技术。最后,进行了硬件在环仿真,并将结果与默认的基于规则控制策略(RBS)进行了比较。
2.柴油混合动力汽车基础
2.1 ISG混合动力汽车的结构与规范
|
整车质量 15000kg 车身长度 11m 发动机类型 涡轮增压柴油发动机 控制系统 共轨控制系统 气缸数 4 最大功率 2200r/min下135KW 排量 5.2 l ISG电机类型 永磁同步电机 最大转矩 1500r/min下 350N m 最大功率 2200r/min下30KW(连续) 2200r/min下50KW(峰值) 电池类型 镍氢电池 电压 312 V(直流) 容量 40 A h |
混合动力总成大致可以分为三种类型:串行,并行和串行-并行。而将电动机嵌入内燃机和离合器之间的ISG混合动力总成是并行型混合动力结构,如图1(b)所示。其第二能源通常是高能量密度镍金属氢化物(Ni-MH)电池组。该动力总成既可以使用自动变速箱又可以使用手动变速箱。混合动力整车控制器(HCU)接收车辆信息(加速踏板,制动踏板,车速等)和组件状态(例如SOC),以在柴油发动机和电动机之间分配转矩。
动力总成的最大转矩是发动机辅助时的最大转矩和电动机的最大转矩的总和,如图1(b)上的曲线所示。如图中星号所示,在低速区域(低于1300r/min)ISG动力总成的额定功率等于原来六缸发动机的额定功率; 如图1(b)中的箭头所示,与六缸发动机相比,其转矩性能得到了极大的提升。
ISG结构具有两个优点。首先,它在不牺牲驾驶性能的情况下将发动机从六个气缸减小到四个气缸。因此,柴油机的平均效率将提高,因为其负载是其峰值负载的较大部分。在低速范围内,动力总成转矩性能的提升将通过使用电动机对减少烟尘排放有所帮助,该电动机可在车辆在城市循环中经历脉冲加速时辅助发动机。其次,因为其像传统的柴油发动机一样是整体组件,所以能够适应各种变速器以及简化动力总成的机械改造。这种并行配置的许多应用已经在汽车和公交上使用了,例如著名的本田IMA系统,欧洲大陆的ISAD和上海交通大学的ISG城市公交车[12]。
本文采用11 m长,45座的城市公交车作为原型车。表1列出了其主要组件参数。组件效率图如图2所示。
表1 ISG混合动力城市客车的基本参数
2.2 能量转换和控制原理的效率分析
本策略目标是使发动机负荷保持在其最高效率线附近(如图2(c)所示),这通过增加电动机或减少其负载(被称为混合动力运行模型)来显示。由于柴油机是其主要动力源,因此柴油机的平均效率越高,就意味着系统效率越高,燃油经济性也越高。然而,虽然电气部件的平均效率很高,但是当电动机用于调节发动机负载时,混合动力运行模型中仍存在损耗。混合动力运行模型的总效率可以通过电动机和电池效率求平方来求得,因为电池能量最终必须补充,并可由以下得出
(1)
该方程式意味着混合动力运行模型中的充放电过程会抵消发动机效率的增加。电池封装效率与它的剩余电量(即SOC)密切相关。如图2(b)显示,若SOC在0.35至0.75之间,则电池效率约为90%,控制策略应尝试将SOC保持在此范围内。电动机效率在不同的速度转矩点上是可变的。根据前面的分析,在电动机产生转矩时,必须根据电动机转速仔细选择电动机转矩。
当车辆减速或制动时,电动机将产生能量以吸收车辆的部分动力。当车辆轻度制动时,电动机产生的制动转矩与制动踏板开度成正比。当进一步踩下制动踏板时,应限制电动机转矩,以免干扰车辆的稳定性。如果SOC达到最高极限,则不应允许再生制动,以防止电池组过充。控制输出的最佳解决方案可能是以车辆转矩需求,发动机转速和SOC为表征的多维图的插值结果。对于RBS来说,这需要许多由不同SOC为表征的转矩-转速图,并且这些图中的大多数点都没有意义。为了避免过多的图并突显对控制策略重要的点,使用了模糊逻辑控制器来实现最佳转矩分配。
3 ISG混合动力汽车的控制策略
在行驶周期的每一秒,HCU都会收到一个加速踏板信号和一个制动踏板信号,并将它们转换为车辆转矩需求。 可以是速度-转矩图,就像是柴油发动机管理系统中的燃油量图。车辆制动时,值为负,并由车速、发动机转速和制动踏板值计算得出。HCU发送模拟信号以模拟柴油发动机的加速踏板信号来控制它,并发送直接转矩命令通过控制器局域网(CAN)通信来控制ISG电动机。
转矩分配控制器对确定柴油发动机和电动机之间的转矩分配是必要的。而当车辆向前行驶时,控制策略应满足其功率需求。而发动机转矩由其节气门开度控制,它可近似为当前发动机转矩与最大发动机转矩的比值,因为当前在发动机管理单元中直接转矩需求接口不可用。可以从测功机的测试结果得到的速度-转矩图中获得。在ISG结构中,电动机与发动机没有用减速器连接:转矩平衡方程为
图2 (a)电动机效率图及其最大转矩曲线; (b)镍氢电池组包装效率图(在环境温度20 ℃下测量); (c)柴油机燃油经济性图(g/KW h)
(2)
关于模糊逻辑控制应用的许多研究实际上是RBS的扩展,其强调了奥克兰大学和俄亥俄州立大学等的研究。本文使用的模糊化方法继承了RBS的优点,并利用了最优思想进一步提高系统效率。这最佳方法通常使用代价函数来选择电动机转矩和发动机转矩的最佳组合,以最大程度地降低即时燃油经济性,但由于计算量巨大,因此已被离线优化的静态映射代替。因此,根据车辆转矩需求,SOC和车速形成了以发动机转矩需求为输出的三维图。其输出经过了许多指定的车辆负载区域和SOC划分的仔细调整。从而可以实现点对点的优化。这些图中有意义的点,也就是通过把用于输入和输出的模糊集的语言符号填充到规则形式中的相应位置,能够方便地将采用混合模式的点转换为控制规则。而模糊逻辑采用适当的方法来实现插值机制,以确保规则库在所有输入范围内的覆盖。
ISG动力总成的整个控制策略包括四个模块,如图3所示。车辆命令解释器会根据驾驶员的需求(例如加速踏板信号和制动踏板信号以及车速)生成。而不会直接发送到模糊逻辑控制器。它会根据发动机转速动态地转换进转矩区域指示器。SOC会从电池管理模块反馈到控制策略,以确定充电时的转矩。基于模糊逻辑控制的转矩分配策略是整个控制策略的核心,该策略利用模糊逻辑实现最优转矩分配。电机转矩校正模块用于混合两个输出,并根据温度、发动机转速和SOC来限制最大电机转矩。
图3 ISG混合动力汽车的多能量控制策略图
4 模糊逻辑基础和插值机理
模糊逻辑[13]是一种智能控制方法,它根据规则而不是精确的数学模型来确定控制输出。这是一种简单、高效且鲁棒的控制方法。此外,它还是一种适用于实时控制的快速算法,因为它不会显著增加计算负担。若采用适当的规则推理法并仔细设计其输入和输出的模糊集划分,模糊逻辑控制也可以被视为多维插值机制。而具有三角隶属度函数的Mamdani模糊逻辑控制器已被证明是插值法[14]。
4.1 模糊逻辑的内插机理
在传统的控制策略中,map图依赖于
决定输出。例如,在图4(a)中,假设,,和位于输出球体上。 对于位于,,和之间的任何点,输出z取决于, ,和使用的线性插值方程式,如拉格朗日方程式。模糊插值机理如图4(b)所示。输入值x分为两个模糊子集和,以及y同理。规则由以下形式定义:所属的任何x和所属的任何y,输出为P1。即生成了四个规则:,,和。因此,输出被这四个规则覆盖,显示为四个具有不同阴影的矩形。是这四个规则的输出的集合,可以看作这四个规则之间的内插。通过去模糊化就可将函数从模糊值转化为实数值。根据第3节,就可以通过模糊插值机理计算车辆驱动转矩需求图中任何点的输出(,,SOC)。
图4 普通的(a)和(b)模糊插值机理的比较
图5 (a)梯形隶属函数; (b)重心法去模糊化
模糊逻辑控制包括三个过程,即模糊化、规则推理和去模糊化,稍后将在图6中进行介绍。而为了实现插值特性,本文中的模糊逻辑控制器采用三角形和梯形隶属函数,以Mamdani规则作为规则推理方法并且以重心法作为去模糊方法。并且在该模糊逻辑控制器中,隶属函数和规则均可通过校准工具进行调整。
4.2 模糊化
梯形或三角型隶属函数由方程描述(图5(a))。
(3)
其中和;min和max分别是一个模糊集的下限和上限.和分别是直线1和直线2相对于x轴的斜率。若直线1或直线2垂直于x轴,则或为零。而该方程首先使用直线1的线性方程计算直线1的隶属度。如果不大于1,则隶属度等于;否则将通过第2行的线性方程函数重新计算。若和都大于1,则等于1,并且利用校准数值数组{min,max,,},模糊集将易于调试与调整。
4.3 Mamdani模糊推理法
Mamdani规则推理的格式为“若A AND B THEN C”。A和B称为前项;C被称为被继承项;min被定义为“与”,根据
(4)若两个
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[236728],资料为PDF文档或Word文档,PDF文档可免费转换为Word

