英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
通过PLC使用LabVIEW以太网控制交流电机
Nader N. Barsoum, Pin Rui Chin
文章信息:
智能控制与自动化(Intelligent Control and Automation),2011年2期,330-339
2011年7月5日接收;
2011年7月26日修订;
2011年9月3日通过;
摘要
通过广域远程控制应用如今已经常用于工业。其中一个常见的应用程序需要远程控制和监测逆变器馈感应驱动系统。驱动系统具有各种类型的控制的,以执行某些动作,例如控制速度,正向和反向旋转电动机的方向。这种方法可以由可编程逻辑控制器(PLC)来完成,随着科技的发展,以太网模块将在为了实现远程控制系统中使用。加上今天的PLC不仅可以利用其原有的软件,而且还可以借助第三方软件,如LabVIEW,LabVIEW是一种用户界面友好的人机界面设计软件,它可以很容易地与不同的硬件通信。
关键词:LabVIEW软件,PLC,以太网,异步电机,OPC服务器,逆变器
- 简介
在过去,工程师们一直在设计需要大量硬件的工程系统。用大量的硬件和布线来设计一个远程控制系统几乎是不可能的。此外,如果工程师们要改进设计,那么所有无关的硬件就要报废了,这不是可持续的。随着技术的兴起,可编程逻辑控制器(PLC)已经缓解了工程设计,减少所需的材料,这是因为整个设计是在软件编程范式实现。PLC已在业界被广泛使用,包括控制异步电机逆变器供电可变驱动系统。设计距离控制机器现在是可能的,甚至通过使用以太网作为计算机与PLC之间的通讯设备。除了通过自己的专有软件设计程序结构,PLC的方便部分是可访问性和可控性由其他软件。需要注意的是,这种软件必须具备特殊的PLC驱动程序。因此工程师可以使用LabVIEW ,其具有不同类型的这些都是虚拟仪器(VI)的工业应用,而不是实际的沉重的仪器,来控制PLC。
2.项目设计配置及制品
2.1.NI OPC服务器
NI OPC服务器有OMRON FINS以太网驱动程序,允许使用LabVIEW OMRON CJ1M CPU11-ETN 21 PLC之间的通讯。欧姆龙原本提供他们的客户有FINS网关,接口,与PLC及其专利软件,欧姆龙CX程序员在以太网进行通信的软件。
随着NI OPC欧姆龙FINS以太网驱动程序,用户可以通过设置只需几个简单的设置服务器并创建可直接连接到PLC的寄存器变量标签。这些标签被命名为OPC标签。在NI OPC服务器还具有NI OPC快速客户端,使用户能够监视的PLC的实时的状态。
只要已经创建了OPC标签的LabVIEW和PLC之间的通信已经简化为操作者可以自动应用所提供的标签是否正确配置相关的FINS指令。与此同时,在LabVIEW中,程序的设计可以通过使用共享变量链接到OPC标签。
2.2. LabVIEW
LabVIEW是实验室虚拟仪器工程工作台的缩写,是用于以最低的成本产生灵活和可扩展的设计,控制和测试应用程序快速图形化开发环境。使用LabVIEW,工程师和科学家能够通过直观的显示,报告和网络与真实世界的信号接口,分析有意义的信息数据,并分享成果。不需要编程经验,LabVIEW的开发,对于所有的用户来说,都很很容易并且很快速就就能掌握的。
在LabVIEW中使用的编程风格为G语言,这是图形化编程的缩写。因为它是取决于图形框图的结构,以执行用户设计的程序它也被称为数据流编程。相比基于文本的编程,LabVIEW是用户友好的,因为用户可以通过简单地设计程序安排和布线有关的图标一起。LabVIEW程序被命名为虚拟仪器或VI,因为它们的外观和操作模拟物理仪器,如示波器和万用表。类似于其它常规编程,LabVIEW的具有标准特性,如循环结构,数据结构,事件处理的,面向对象的程序设计。 LabVIEW中也有类似的MATLAB库和某些部分基于文本的编程数学函数的扩展库的公式节点,但同时需要复杂的逻辑结构代码。除此之外,LabVIEW还具备网络库函数,可以方便地给用户参考。
相比其他软件,如微软的Visual Basic,LabVIEW是一个更好的选择,因为它有一个函数库一起涉及包括共享变量的绑定到OPC标签项目库,允许通过使用共享连接相关的图标,服务器和客户端通信变量。如果使用的Microsoft Visual Basic(VB),欧姆龙FINS以太网驱动程序必须使用MS通信功能进行开发,这将需要更多的时间来开发代码。
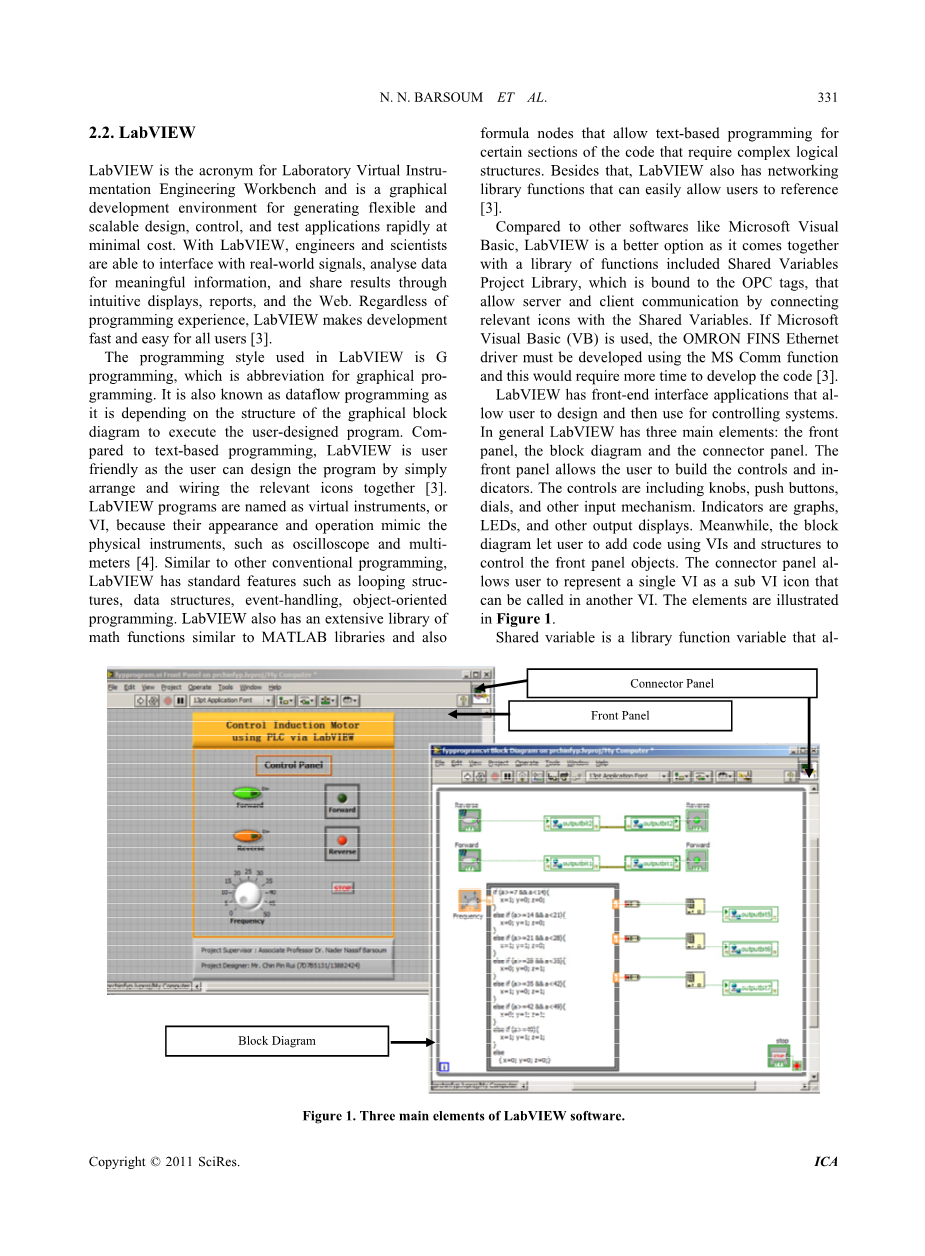
LabVIEW的具有前端接口应用程序,允许用户设计,然后使用,用于控制系统。一般来说LabVIEW中有三个主要元素:前面板,框图和接口面板。前面板允许用户建立的控制和在修复作用。该控制是包括旋钮,按钮,拨号盘和其他输入机制。指标是图表,指示灯等输出显示。同时,框图让用户使用VI和结构,以控制前面板对象添加代码。连接器面板允许用户来表示单个VI作为子VI图标可在另一个VI被调用。元件如图1所示:
图1.LabVIEW的三个主要模块
共享变量是一个允许在网络上的应用程序或不同的数据源之间的数据的共享的库函数变量,LabVIEW中许多现有的数据共享的方法,如UDP / TCP,LabVIEW的队列和实时FIFO。相比于数据通信,使用共享变量是用户友好的配置因为可以通过再库中简单的设置,而不是写URL来完成,并在DataSocket的通信执行更多的布线。
2.3.可编程逻辑控制器(PLC)
PLC的执行部分是欧姆龙CJ系列 ,应用于PLC的有四个单元,即电源(CJ1W-PA202),具有以太网功能(CJ1M-CPU11-ETN21)CPU单元,基本输入单元(CJ1W-ID211)和基本输出单元(CJ1W-OC211)。存在用于PLC单元的端盖。所有这些单元可以通过将它们装配在一起,并通过移动它们朝向单元的背面锁定滑块相连。端盖必须在PLC的最右边相连。否则将出现严重错误。
图2展示了PLC单元的排列。为了让PLC通过以太网来操作时,PLC必须给予与目的地节点号码(DA1)不是网络中的其它IP地址DA1s。目的地节点号码也被称为一个IP地址的最后八位字节。
PLC的节点号通过转动CJ1W-ETN21模块上的刻度盘,如图3中所示的可编程控制器也必须给予网络中的一个单元号码之外的目的地节点地址(DNA)。
节点未为节点地址而times; 是最低有效位(LSB)节点的地址。IP地址是十进制的形式,因此在软件配置到PLC以太网模块的DA1所做的任何引用必须是小数。转换任何十六进制数为十进制,应用如下所示:
该PLC被配置的IP地址10.1.136.46,对于本文中所描述的执行。路由器是用于个人家庭网络。因此,使用的设备在网络中相关的IP地址是根据C级分类。
2.4.变频驱动
欧姆龙SYSDRIVE3G3MV-A2007变频器可以用于改变提供给电机的电功率的频率的变频驱动器,用于改变电机的转速。
图2.项目中连接的PLC单元
图3.CJ1W-CPU11-ETN21的硬件配置
该SYSDRIVE3G3MV-A2007年逆变器适用于各种应用,因为它集成了许多方便的控制和易于使用的,以及开环矢量控制功能IO功能。矢量控制功能的优点是,它确保了扭矩输出,在1赫兹的输出频率的电机额定转矩的150%,允许在低频强大革命和抑制引起的负载的转速波动.
需要为了有效地控制三相鼠笼型异步电动机进行配置的3G3MV变频器的功能参数列表。
- 实施
3.1.实施过程
本文提出的以太网控制系统是控制鼠笼式三相异步电动机。为了实现这些目标,建立PLC与LabVIEW之间的通信是关键,因为LabVIEW是第三方软件而不是使用PLC本身实现的软件。因此,使用LabVIEW来执行的开始和停止马达的操作中,无论是在正向或反向方向,并通过改变电机的频率变化的速度执行。然而,该系统不是一种监督控制和数据采集(SCADA)由于没有实际数据测量获取马达的实际输出。
该系统具有三层网络架构,如图4所示。
如图5所示,用户将获得通过主计算机,它是一台有权限控制的笔记本电脑。然后由用户输入的数据将转换为布尔数据,并通过以太网电缆和路由器发送到CJ1M-CPU11-ETN21可编程逻辑控制器。一旦布尔数据已经由PLC处理,在PLC的基本输出的相关地址将被接通。这个过程让3G3MV变频器/变频驱动器根据用户提供的输入数据运行三相鼠笼式异步电动机。此外,3G3MV变频器/变频驱动器也可以作为电源单元和电机之间逆变器为输入电源为单相供电,而笼型异步电动机由三相供电。
图4.三层网络架构
3.2.VI设计的实现
本文中的VI方案的目标是允许用户通过执行两个简单步骤,来决定电机的运转或者停止,无论是在正向或反向方向,并通过改变电机的频率来改变的速度。首选通过按下VI前面板上的能决定是正传还是反转的按钮来选择转动方向。其次通过转动频率旋钮来达到用户期望的速度,前面板如图6所示。
运行VI之前,确保所有的硬件已开启并正确配置,并启动NI OPC快速客户端,这样的OPC标签可以通过在此VI共享变量进行浏览。
图5.实际的网络配置
创建了5个OPC标签并且在实现过程中使用,并且标签的细节在表格1中所示。
通过参照图6,绿按钮是确定电动机在向前的方向转动开关。同时,橙色按钮是确定电机反向转动开关。若按钮已被接通那么在右手侧都绿色和橙色光指示灯会进行显示。标记为“频率”的旋钮是控制频率以及所述电动机的转速的关键方案。标记为“停止”功能按钮来停止程序的执行。
表1. OPC标签的细节及其对逆变器的连接
图7显示的程序框图,该VI的程序的一部分。通过参照图7中,红色正方形框用虚线是均为前面板和框图中可见的VI组件。例如,按钮,旋钮,指示灯。与此同时,虚线以外的红的正方形框是逢场重要的VI构建程序,他们在框图中可见,但在前面板上不可见。例如,共享变量,公式节点,数布尔转换器(包括一些布尔数组,数组索引)和类似于c边城里的While循环。 这个循环再VI中使用以确保直到停止按钮触发程序继续执行。
该程序框图包含的程序两部分组成。该方案的第一部分是允许用户在向前或鼠笼异步电动机的反向切换。该方案的第二部分是通过改变旋钮值来改变电机的频率。
图6.VI项目的前面板。
通过参照图8,如果用户已在前进按钮开关,该信号将被发送到“输出位1”共享变量,这是在写模式,i,e。信号将被写入到PLC。然后,一旦信号被成功写入PLC,PLC的输出地址1.01的指示灯,以及LabVIEW前面板中的“前进”方向指示灯会亮起。这个过程等同理于反方向。
通过参照图9中,红颜色方框表示VI命名式节点,其中,在式节点所使用的语言是C中的用户通过转动“变频”旋钮设定的频率的值后,该值将被发送到式节点,在那里它被表示为“a”。
图7.VI项目框图
图8.程序框图程序(马达方向开关部分)
图9.程序框图程序(电机频率变化的一部分)
输出节点已经被分成了数量为0或1的X,Y。Z,为了要使共享变量可读取,因此有必要数据转换成布尔格式。该信息将被写入到PLC,并且输出地址1.05,1.06,在PLC的1.07的光指示器将根据所需的输出点亮。
下面的表2描述了多级调速1-3和频率1-8级的关系。 表格种频率和速度的关系是PLC和布格尔变频驱动器通信的关键。在本文中,每一个频率基准的值已列于表3中。
表2.多段速引用和参考频率的关系
表3. 输入频率的条件在LabVIEW中变化的频率参考。
参照表3,只要用户已经根据任一条件的设置输入频率,数字将被转换成布尔其中将根据相关的多步骤的速度参考安排。然后此布尔数量将根据表3所列例如输出条件触发的变频驱动器,并确定频率和以及鼠笼感应电机的转速,如果用户设置的输入为8赫兹,此值的输入范围是7lt;Xlt;14。
因此,多段速定值1的布尔值数为1,其余为0。然后,该信号触发的变频驱动器来提供7赫兹的频率。
4.测试和验证
实施后,试验是为了进行验证系统工
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[147200],资料为PDF文档或Word文档,PDF文档可免费转换为Word

