
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
双足机器人在崎岖地形运动的动态研究
-直线倒立摆模型的推导和应用-
摘要
本文介绍了一种双足机器人在崎岖地形运动新的控制方法。我们假设理想中机器人模型的腿是没有质量的。通过约束控制机器人,使它在特定的直线移动,以恒定的角速度旋转,身体的动态质心完全地变成线性。我们称这种运动的理想模型为线性倒立摆模型,用它来设计双足机器人在崎岖地形行走的控制方案。在线性倒立摆模型的控制下,在一个特定的崎岖地面上行走相当于在水平的地面上行走。这也表明踝关节力矩的附加使用让我们的控制方案完整且适用于一个真正带有一定质量的双足机器人。提供仿真结果。
1.介绍
很多两足运动的研究在全球进行。其中一个重要方法是提取动态行为的主要特点。因为两足动物的动态是高阶非线性, 除非我们做一些简化,否则很难理解。
一个很好的分析技术让我们理解两足运动的动态。有时,它也帮助我们建立控制规律。Golliday和Hemami通过状态反馈把双足的高阶系统动力学变成单独的低阶系统。Miyazaki和Arimoto用非凡的摄动技术,显示的双足运动可分为两种模式:快速模式和缓慢模式。
Furusho和Masubuchi得到了一个降阶模型,这个模型作为主导子系统近似于原始的高阶系统很好地应用于双足机器人的每一个关节的地区性反馈。Raibert使用对称分析一、二和四腿机器人,这个机器人被名为三部分控制的算法控制着。
在本文中,我们介绍了一个未来分析了双足动态行走的新技术。首先,我们考虑把约束控制应用于一个理想的机器人,以此达到让机器人的身体按照特定的直线和以一个恒定的角速度旋转的目的。由于这样的控制,我们发现动力学身体的质心变得完全线性的。此外,约束系统的动态在设计双足步行运动上有很多优势。我们称这种理想的运动模型为直线倒立摆模型。
基于直线倒立摆模式的动态,我们设计了双足在崎岖地形上行走的控制方案。踝关节力矩附加的使用被视为使控制方案健全且适用于一个真正带有质量腿的双足机器人。进行仿真确定整个理论。
2.直线倒立摆模式
2.1.支持阶段的运动方程
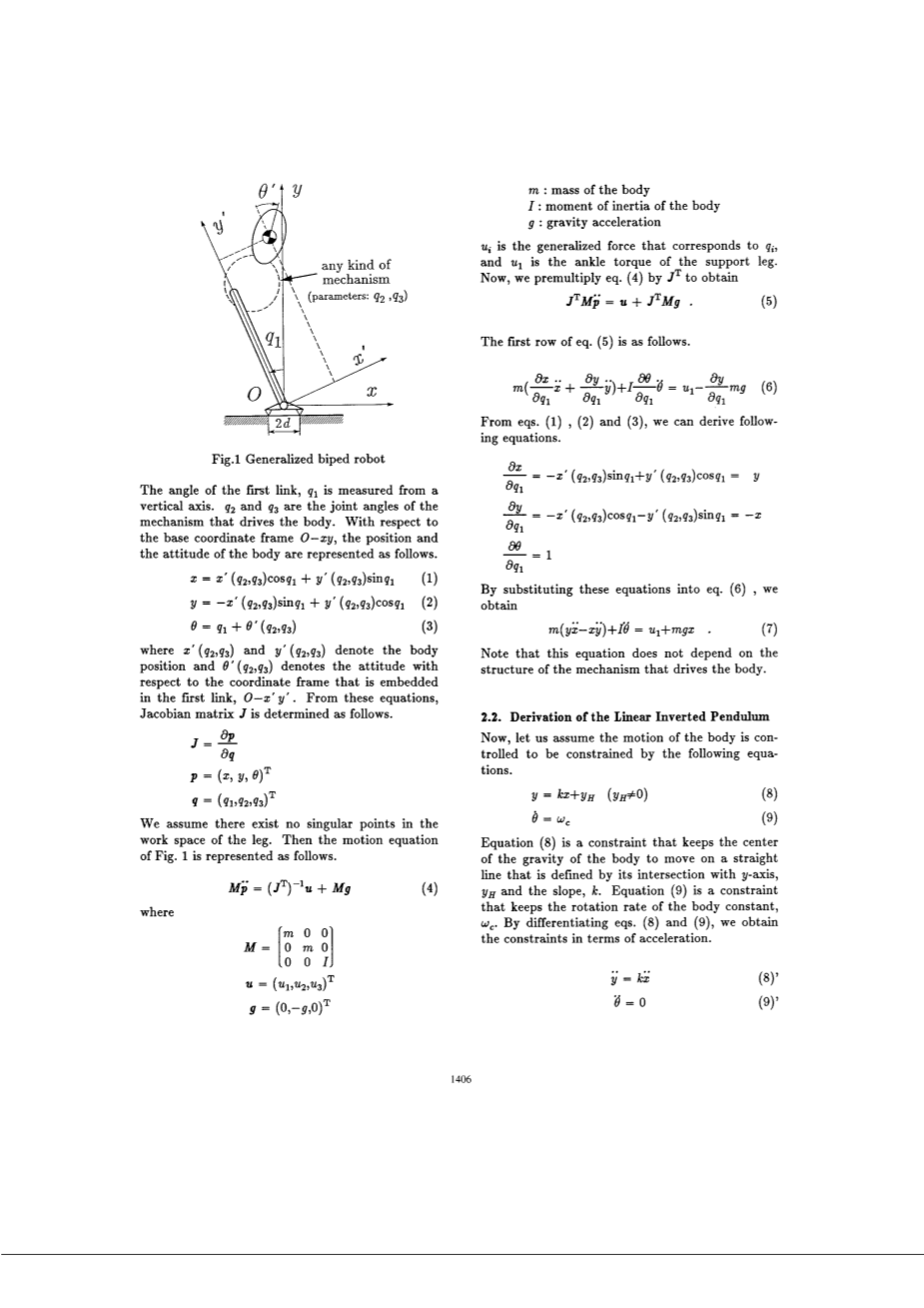
我们假设有一个身体和两个无质量的腿的双足机器人被限制在矢状面移动(即定义一个垂直轴和运动的方向。我们也要考虑只有一条腿支撑身体的情况。图1显示了这样的机器人模型。对于腿的一般结构,我们假设第一个链接连接到踝关节和任何类型的两自由度的机制通过第一个链接驱动身体。
图1广义的双足机器人
第一链接的角度,是测量垂直轴。和是推动身体机制的关节角,。关于基本坐标系0一x y, 身体的位置和姿势表示如下。
在上式中xrsquo;(,)和yrsquo;(,)表示身体的位置,rsquo;(,)表示第一个链接在嵌入式的坐标系0一xrsquo;yrsquo;中的位置。从这些方程中,雅可比矩阵J被如下表示。
我们假设在腿的工作区域不存在奇异的点。然后, 图1的运动方程被如下表示。
上式中
m:身体质量
I:身体的惯性力矩
g:重力加速度
:是相当于的广义力,是支撑腿的踝关节力矩。
现在,我们乘以式(4)得到
式(5) 的第一次变换如下:
从方程式 (1)、(2)和(3)中,我们可以得到下列方程。
通过把这些方程替代到式(6 )中,我们获得
注意,这个方程不依赖结构的机制驱动身体。
2.2 直线倒立摆的推导
现在,让我们假设身体的运动乐于被以下方程完全约束。
方程(8)是一种约束,使中心身体的重心沿着直线移动,这条直线通过为与y轴的交点、和斜率k定义。方程(9)是一种约束,让身体以恒定角速度旋转, 由微分方程式(8)和(9 ),我们获得加速度的约束条件。
把方程式(8)、(9)和(8)代入到方程式(7)中,我们获得
方程式(10)是一个自由度的运动方程,因为我们把两个约束条件强加到三个自由度的机制上。约束的力通过方程式(5)计算出来。
(a)斜率轨迹 (b)水平轨迹,旋转的神体
k=0.3,=30.0[cm],=0.0[rad/sec], k=0.0,=30.0[cm],=1.0[rad/sec],
x(0)=-7.0[cm],(0)=41.0[cm] x(0)=-7.0[cm],(0)=41.0[cm]
图2直线倒立摆模型
m=2.0[kg],I=1.7[] 髋关节到质心距离:8.0[cm]
图2(a)和(b)显示了模型运动的约束例子,这个模型包含一个长度可变的腿,一个坚硬的身体和一个髋关节。在图2(a)上的约束线倾斜的,在图2(b)上的身体以恒定速率旋转。它们都是在缺少踝关节力矩( = 0)是运动的。需要注意的是两者身体运动质心的水平分量是相同,因为两者的实例具有相同的和运动水平分量的初始状态是相同的。
方程式(10)代表了非线性方程式(4)的一个类解决方法。方程式(10)的特点是:
1.在直角坐标系上是线性微分方程。
2.不依赖于腿的结构。
3.不依赖于除了之外的约束参数。
我们称这种运动为直线倒立摆模型,并提出它的设计和双足动态行走运动的控制。方程式(10)可能看起来像一个简单倒立摆的线性运动方程。然而,需要注意的是方程式(10)可以在整个状态空间被使用,而线性方程只能在平衡点附近使用。因此,线性倒立摆模型对于设计的弓步双足运动是有用的。
3.步行运动的设计
3.1 约束线斜率的变化
方程式(10)不包括参数k,所以在不影响的身体运动水平分量的情况下约束线斜率的改变是有可能的。为了保持参数恒定,斜率在x =0的点改变。当身体移动到x = 0时,身体必须被一个脉冲驱动,沿垂直轴移动。
其中,k1和k2是约束线变化前后的斜率。如果约束通过使用局部反馈控制来实现,该脉冲是由伺服系统产生的,并且我们不必施加脉冲到行走运动的设计中。
3.2 行走运动与支撑腿交换
为了设计令人满意的行走运动,我们认为运动用不到踝关节力矩(= 0),因为踝关节力矩在大小上是有限的,我们希望保留它以与应对第4节所示的扰乱。
图3显示了一个支撑。我们指定在腿交换方面身体被约束在同一条线上(相同的K,相同的,以及假定支撑腿必须立即更换。我们假设身体速度变化的水平分量在如下的持续交换中从变为。
图3支持腿部交换
其中,e是取决于腿在交换、地面合规等的条件下脚摆动速度的参数。当踝关节力矩为零,方程式(10)的第一积分是
在每个步和这步的特定运动中E是守恒的。我们称之为轨道能量。考虑到图5,我们得到方程和,之前和之后的轨道能量支撑脚交换。
其中,是在脚交换和跨步支持下身体的水平位置。当我们通过指定名义运动,腿交换条件可以从方程式 (14),(18)和(17) 中计算出来。
3.3在崎岖地形步行运动的设计
在崎岖地形步行运动的设计法则如下:
步骤1:决定在地上的降落点。
步骤2:定义通过距降落点的高度为的连接点的约束线。
步骤3:计算每个从名义运动的支撑阶段的轨道能量E和计算身体的位置以及通过方程式(18)支持腿交换的。
图4显示了一个在崎岖地形上步行运动的示例。
(a)符号图 (b)身体轨迹的水平分量
图4在崎岖地面行走设计
4 使用踝关节力矩稳健行走
双足机器人在行走时遭受多种干扰。如果我们把这些干扰视为力的方面,那么,它们影响机器人在两个方面的运动:偏离约束线和偏离名义水平轨迹。前者可以通过局部反馈让约束控制生硬、稳健防止干扰被最小化。所以我们会考虑干扰影响身体的水平轨迹。
其中d是干扰力的地方。
考虑到真正的双足机器人的控制,我们假设d也包括腿的质量影响。在干扰下, 没有使用控制的运动从不会沿着我们在第三节设计的轨迹。此外,如果在系统状态和名义上的状态之间有误差,它将以指数形式增长,因为方程式(19)的系统是不稳定的。当支撑阶段的持续时间和系统的稳定时间相比较会很长时它是很严重。当我们使用踝关节力矩控制身体的水平运动时这个问题已经解决了。例如,我们可以用以下控制规律。
其中,和 给出了如第三节所示的理想双足的标称轨迹,和是反馈增益。
在方程式(20)中踝关节力矩用于消除干扰力d。踝关节力矩可用的数量级是有限的,因为执行机构转矩有限,因为机器人施加到地面的脚踝转矩必须满足脚能保持安全地接触地面的情况。因此,腿的质量相比身体的质量足够小是必要的。
5 仿真
进行仿真验证上面所讨论的控制方法。我们使用以我们实验的双足机器人(图5,表1,2)为基础的模型。
每条腿是一个由四个链接组成的并行链接结构。每条腿的两个链接通过被用来向腿传递力量的虚线显示。为了使运动方程的推导过程简单,我们假设这每条腿的两个链接都是无质量的。最后,我们的仿真模型被认为是五刚体模型。
图5五刚体模型(在矢状平面里)
表1双足参数值 表2驱动参数值
局部PD反馈控制被应用于除了踝关节每一个关节。为了保持约束状态,这些关节的参照角从踝关节的角度被计算出来。踝关节力矩通过方程式(20)计算。作为名义上的轨迹,我们使用被显示在图4中的步行运动理想模型。为了达到支撑脚交换的下一个降落点,摆动的腿被控制。我们设计一个平滑的没有大加速度的轨迹,以避免摆动腿的惯性力对身体运动的影响。
(a)符号图(20米秒的间隔)
(b)身体轨迹的水平分量
(c)零力矩点
(d)来自地面的垂直作用力
图6仿真结果
图6(a)显示了模拟双足行走的照片。在图6(b)中,粗线表示模拟控制模型身体速度的水平分量。细线表示参照轨迹通过无质量腿的模型比较被计算出来。身体的运动轨迹被来自腿交换的参照所扰乱。但是错误的轨迹在每个支持阶段收敛。
图6(c)显示对每个降落点的零力矩点位置(ZMP)。ZMP是在这时造成地面反作用力等于零的地面上的点。它可以通过来自地面的垂直作用力划分踝关节力矩被简单地计算。当ZMP存在于脚长之内,脚趾(或脚跟)不离开地面并且稳定的双足行走是有可能的。从这个图中,我们知道了机器人的脚需要从脚踝处正向长约4厘米和反向3.5厘米。这是一个脚的大小适当的以每步12厘米步行的机器人。
在图6中(d),实线显示了从地面的垂直作用力,虚线显示了机器人的总重量。图中箭头显示约束线斜率变化的点。除了腿交换中的冲力,从地板上传来的垂直作用力总是正向的。因此,机器人的脚在行走时和地面保持接触。
在仿真时,我们假定在方程式(14)中e = 1。然而,现实中很难评估e,因为它取决于连杆机构和地面的碰撞现象而变化,这种变化导致了不稳定。为双足的稳定控制,要考虑三个对策:
- 为了控制规律稳健,
- 为了在降落时使用合规控制软化碰撞,
- 为了使模型更精确分析碰撞现象。
所有的这些属于我们未来的工作。
6 结论
通过双足广义模型,我们推导出一个简单的设计和控制双足运动的动态。我们把它命名为直线倒立摆模型,并提出设计双足机器人在崎岖地形行走的方法。
线性倒立摆模型从没有质量的腿的模型衍生出来的。然而,结果表明有质量腿的机器人可以在同一意义上使用踝关节力矩被控制。我们进行了双足机器人在崎岖地形行走的仿真来确定控制策略。
在本文中,我们假定机器人在一个二维矢状面上运动是受限制的。然而,我们也想控制机器人在一个三维空间行走。未来的控制方式是把机器人运动分解为矢状面部分和侧面部分并且通过协调腿部交换来控制每个运动部分。该方法被包含在我们未来的工作中。
参考文献
[1] Furusho, J.,and Masubuchi, M., 'A Theoretically Motivated Reduced Order Model for the Control of Dynamic Biped Locomotion,' ASME Journal of Dynamic Systems, Measurement, and Control,Vo1.109, 1987, pp.155-163
[2] Golliday, C.L., and Hemami, H,'An Approach to Analyzing Biped Locomotion Dynamics and Designing Robot Locomotion Controls,' IEEE Trans. on Automatic Control, AC-22-6, 1977, pp.963-972
[3] Gubina, F., Hemami, H., and McGhee, R.B.,'On the Dynamic Stability of Biped Locomotion,' IEEE Trans. on Biomedical Engineering, BME-21-2, 1974, pp.102-108.
[4] Kajita, S., Tani, K., Kobayashi, A.,'Dynamic Walk Cont
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146380],资料为PDF文档或Word文档,PDF文档可免费转换为Word

