
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
仿生四足机器人的设计研究
作者:Katayon Radkhah ,Stefan Kurowski,and Oskar von Stryk
摘要
在本文中,我们总结了一些动物的腿的运动的基本原理,然后研究了这些原理在四足机器人中的设计与制造中的应用。在这里提出的模型相结合的想法,无论是在模仿生物,机械智能结构和仿生控制器,都是为了更好的运用机器人。机械腿的运动是由类似生物肌肉的仿生驱动器触发的。机器人是由几个不同的步态和没有反馈控制的仿动物运动构成的。它有四条腿,每一条腿都是有三个关节和两个驱动。在开发过程中也注意到了模型的技术的实现。运用特别的技术,以减少重量的机器人,比如通过改变弹簧刚度,通过智能控制来代替一个额外的电机,当然这个还在中带你发展的期间。在这两个新的功能种,我们的四条腿的概念包括易变弹簧刚度部署在仿生驱动器的关节,这种调整的方式既不需要复杂的计算,也不需要额外的电机。此功能允许平滑的过渡到不同的步态并且不必改变控制器的参数。
一、引言
动物和人类采用腿的方式进行运动,由一种令人难以置信的适应性和多功能这种方法提供的运动。腿可以以不同的速度在崎岖不平的地形上行走,爬楼梯,规避或跨过障碍物。
但步行是一个复杂的过程,需要众多肌肉的协调来保持稳定的姿势,同时提供前进的动力。这系列协调行动不仅需要中央控制而且要从更高的中心得到控制,他们依赖于脊髓反馈和大量的本地控制和反馈系统。稳定行走需要控制系统的周期性序列,腿运动在不同的速度下进展。在缓慢的速度,其特征在于由静态稳定性,其中的中心的质量的身体保持,腿与地面接触形成的多边形的支持。有六条腿或更多腿的动物,如果它们离开地面至少有四英尺,它们就保证了静态稳定性。在另一方面,四条腿的动物的稳定性,是有条件的,那就是重心的位置,只要他们把一条腿离开地面。四足动物有主动控制系统,用来改变他们的身体位置来确保垂直投影的重心落在支撑面上的腿支撑的三角形。事实上,如果四足动物的脊髓折断了,其运动可能没有明显的中央控制。
图1.模型的整体结构概述,箭头为其行走方向。
四足动物的运动不同于昆虫,在一些重要方面不能和人类相比。相比之下人类和其他动物提高了自己的支撑点,四条腿的动物与地面接触的数量相对较多而不是两绕其重心的身体水平姿势是四足动物的静态稳定性。此外,四足动物的特点是大量的腿部动作,不同的周期序列,如爬行、步行、小跑和慢跑,在序列中,脚接触地面的不同在于从一个步态模式过渡到另一个相关的速度和效率(单位距离内能源的消耗)。
最近的多足机器人的发展,灵感往往是基于生物,用来显着改善他们的速度和稳定性。本文将介绍和讨论各种考虑的机械结构和控制器设计的仿生兼容的四足动物,能够行走在不平的地形,不需要传感器的反馈,并演示了高效和灵活的运动。在第二节中,我们将回顾现有的四足动物模型的运动设计,主要安装驱动控制。第三节讲的是各种方法的欠驱动运动腿的设计,尤其是链路长度优化。第四部分通过改变不同的控制参数的模型能够执行各种步态分析。开发结构的图形视图显示在图1。
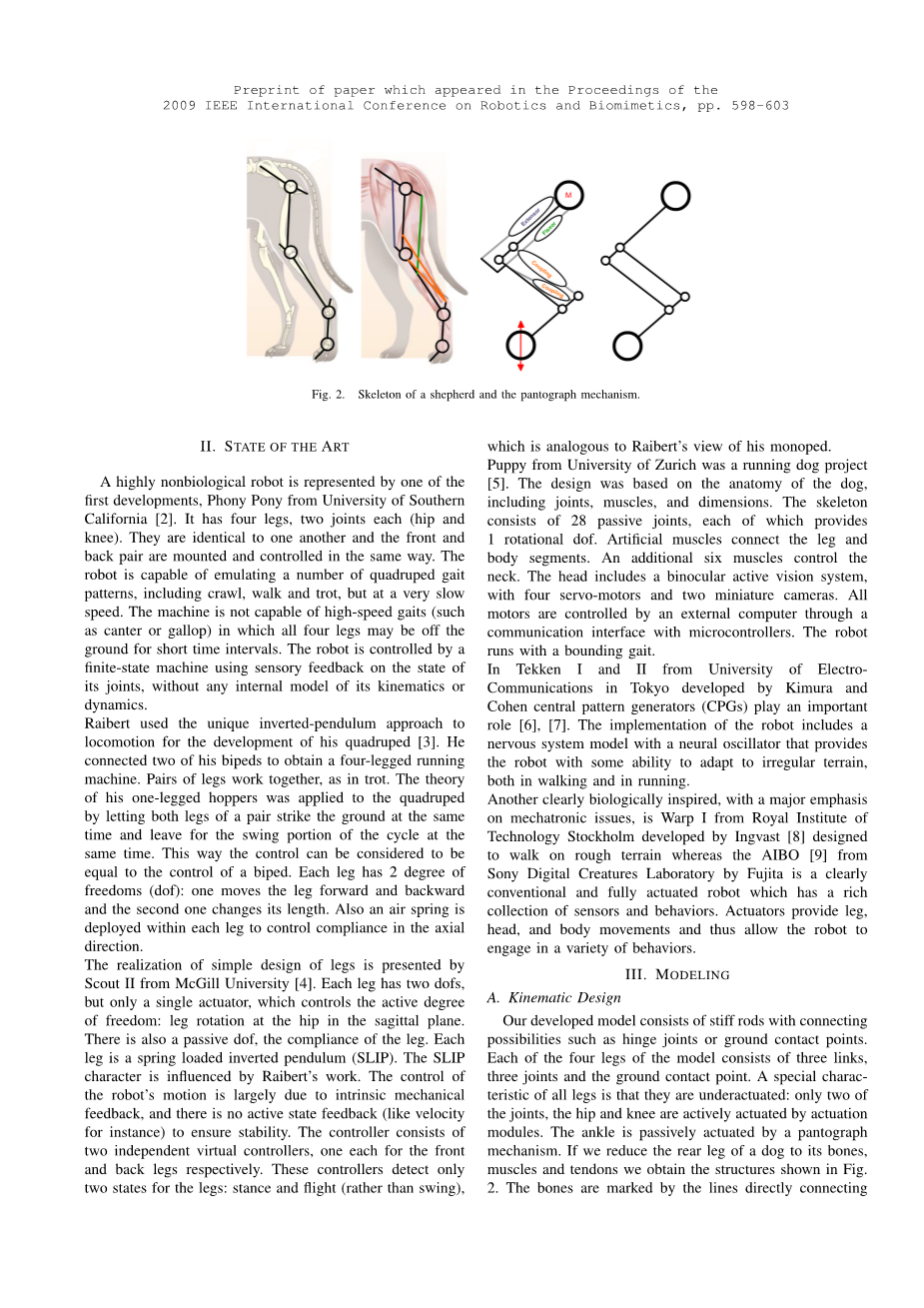
图2.牧羊犬骨架与受力结构
二、技术发展水平
一个高度非生物机器人的第一个发展代表是来自南加州大学的Phony Pony [ 2 ]。它有四条腿,两个关节(髋和膝)。它们彼此相同,前后对以相同的方式安装和控制。该机器人能够模拟一些四足动物的步态,包括爬行,步行和小跑,但在一个非常缓慢的速度运行。机器不能够高速步态(如慢跑或快跑)在于它的四条腿可能是短时间内离开地面。该机器人是由一个有限状态机使用fi感官反馈对其节点的状态控制,没有任何的运动学或动力学的内部模型。
拉伯特采用独有的倒立摆的方法为自己发展四足运动[ 3 ]。他与他的两个两足动物获得一四条腿的运行机。双腿一起工作,如小跑。他的一条腿的漏斗的理论是让一双双腿撞击地面的同时,为在同一时间周期摆动部分应用于四足动物。这样的控制可以被认为是等于一个两足动物的控制。每个腿有2个自由度(DOF):一条腿向前和向后移动,第二个改变它的长度。此外,在每个腿部署空气弹簧,以控制在轴向方向上的顺应性。
双腿简易设计的实现是由麦克吉尔大学II(4)提出的。每个腿有两个自由度,但只有一个驱动器,控制自由的活跃度:腿在矢状面上的髋关节旋转。还有一个被动的自由度,遵守的腿。每个腿是弹簧加载倒立摆(滑)。滑移特性是受Raiber的作品影响。机器人的运动控制主要是由于内在的机械反馈,并没有积极的状态反馈(如速度的例子),以确保稳定。该控制器由两个独立的虚拟控制器,分别为每个前和后腿。这些控制器检测到只有两个州的腿:立场和飞行(而不是摆动),这是类似于Raibert对他的monoped观点。
来自苏黎世大学的运动的小狗的项目[ 5 ]。该设计是基于对狗的解剖,包括关节,肌肉和尺寸。骨架由28个被动关节,其中每一个提供了1个旋转自由度。人工肌肉连接腿部和身体部分。额外的六肌肉控制颈部。头部包括一个双目主动视觉系统,有四个伺服电机和两个微型摄像机。所有电机都由外部计算机控制,通过与微控制器的通信接口。机器人运行与一个边界步态。
在铁拳I和II从电气通信大学在东京开发的Kimura和Cohen的中枢模式发生器(CPG)发挥重要作用[ 6 ],[ 7 ]。机器人的实施包括一个神经系统模型与神经振荡器,提供了机器人的一些能力,无论是在行走和运行中以适应不规则的地形。
另一个明显的生物的启发,对机电一体化问题的一个重点,是经我从皇家理工学院斯德哥尔摩ingvast [ 8 ]设计走在崎岖的地形的AIBO[ 9 ]从索尼数码生物实验室由藤田是一个传统和全驱动机器人具有丰富的传感器和行为。致动器提供腿部,头部和身体的运动,从而使机器人从事各种行为。
三、建模
- 运动学设计
我们开发的模型由刚性杆连接的,如铰链接头或接地点。该模型的四个腿由三个环节,三个关节和地面接触点。所有的腿的一个特殊的特点是,它们是欠驱动:只有两个关节,髋关节和膝盖由驱动模块主动驱动。踝关节被动受电弓机构驱动。如果我们把狗的后腿减少到骨骼、肌肉和肌腱,我们得到的结构如图2所示。
骨骼是由线直接连接接头标记,肌肉的附着在髋关节和膝关节的平行线表示。在这幅图中,肌腱在膝关节和踝关节处相互连接。请注意,一个牧羊人的后腿完全启动。所示的锚索施工从而不充分fiCE为低段的完整的运动。因此,我们的目标是构建一个生物启发的四足机器人,我们利用的受电弓机构,这是一个有用的工具,以减少的重量和负载的骨头通过张力带,一种广泛应用于轻量化设计的技术[ 10 ]。更换钢筋的肌腱,我们获得受电弓如图2所示的权利。当然,这样的模式失去了弹性,将在以后讨论细节。
图3.自然原型髋、膝、踝关节值的比较及模拟模型。平滑的细线条代表了模拟和插值值。上面的图片显示髋关节的值,膝关节和踝关节的值。
为了比较一个完全驱动和欠驱动机器人的运动区别,这两个模型的脚点的运动的几个步骤被投影到一二维平面确保的尺寸和驱动模式相匹配。此外,完全驱动和欠驱动的膝盖和踝关节的角速度进行了比较,显示只有轻微的偏差,这是由于通过增加额外的受电弓杆的重量变化引起的。关于完整的模型,但是,一个全方面的重量减少可以注意到,由于节省了一个电机每条腿。此外,机器人的工作范围可以扩大由较低的能源消耗。这里显示的完全驱动模型的运动序列几乎完全符合测量的真实运动序列的一四条腿的动物,如马,如图所示3。髋关节,膝关节和踝关节的真实关节值进行了比较与模拟的。由于缺少的负载和内插有两个地块之间的一些偏差。然而,根本的相似之处是不可错过的。
为了识别前面的狗例如后腿之间的根本区别,我们将在图4泰国脊背龙骨架一看。如果我们把前腿的运动学由一个水平移动,我们可以注意到,同样的颜色标记的骨头的相对说谎腿的特点是匀速运动。水平线表示最上面的旋转运动的支点。因此前面的运动序列和后支腿可以说忽略前脚,但增加近端关节相等,锁骨。这种轻微的修改fi阳离子对每段长度的影响。后腿的节段长度比大致相同,但前腿的节段不同。还应该注意到品种间变异性小于品种内的变异性。因此,它并不奇怪,长度比锁骨外侧的一个牧羊人和一个泰国脊背龙的前腿小腿几乎与1至1至2。在我们的模型中的基本设置的前部和后部的腿被选择是相似的。在第四节中讨论了长度比。
图4.泰国脊背龙骨架
到目前为止,只有在矢状面的运动是可能的。横向平面的运动成为可能,通过增加一个连接作为前部和后部的腿之间的连接部分,如图1所示。这额外的联合允许围绕Z轴的高度轴旋转。其优点是,我们不复杂的二维驱动模块中的腿,并实现由一个额外的关节,这是负责整个模型的转向的三维运动。这个关节是由一个弹性驱动器,将随后解释。
B.受生物启发的驱动
驱动的模型来实现生物激励的驱动模块,像肌肉。一个这样的仿生驱动器的建设原则灵感来自于固有的弹性和拮抗肌肉和肌腱装置的人体手臂的功能原理[ 12 ]。该原则是基于专门的应用程序中的串联弹性的驱动器与适当的定位传感器系统相结合。因此,设计只依赖于标准的机械和电气元件的创新组合。弹性驱动的关节是由传统的,旋转的直流驱动器,这是不位于驱动的旋转关节,但附加在另一端的相应链接[ 13 ]。这种传统的旋转电动致动器通过一对电缆和弹簧弹性地连接到致动接头上。该电缆连接拮抗的驱动链接,从而减轻臂弯曲应力,从而更轻量化的设计环节。我们将使用上述所描述的仿生驱动器的关节的模型的驱动。
C.模型控制器设计
神经系统能产生神经冲动的步行或跑步步态周期放电相关的各种内有中心。它们通常被称为中央模式发生器(CPG)[ 14 ]。CPGS主要位于脊髓。活性的CPG的水平是在神经系统的控制和更高的中心fl受感官饲料从四肢外周受体后。小脑负责精细控制运动。在我们的模型中,我们只使用前馈控制。该模型不需要任何感官反馈。控制器被划分成一个集中和分散的部分为每个腿。这种设置的优点是一方面精确对齐的自然原型,另一方面增加模块化。在运动中,一个生物有意识地控制许多参数,例如它的速度,但是大多数动作和机械过程都是在不知不觉中进行的。这种控制的概念也转移到模型。集中的部分代表有意识的命令,而分散的部分负责所有不自觉采取行动。中央控制机构代表一个中央模式发生器,触发每个腿的信号序列取决于三个参数:
周期:腿的两个信号之间的时间距离。所有的腿在相同的频率操作。
横向偏移:同一侧的腿相对于步幅的时间偏移量。
尾偏移:后腿的时间偏移量相对于步幅的百分比
图5.实际与仿真弹簧刚度的比较。髋关节仿生驱动的实际刚度。髋关节仿生驱动中的仿真刚度。从上到下显示髋关节、膝关节和踝关节的关节角度。
每个腿连接到CPG和接收其自身的序列信号取决于上述参数。从集中部分触发后,分散模块确定的联合值的时间序列。每个关节有两个定义的状态,中性和主动位置。如果关节都处于中立位置,机器人就会静止。当信号到达关节时,仿生驱动器通过改变电机位置来移动关节。由于电机速度高,这种情况发生得很快。相应的段的反应时间,但是,取决于弹簧刚度的弹性联轴器。延迟可以模拟由一阶滞后元件。当接头的信号结束时,电机旋转回来。再次段如下时间延迟。机器人的近端关节不同于它们的运动从远端关节。他们有一个额外的状态,他们首先旋转一点回来之前采取他们的积极地位。这可以观察到在动物运动。
D.改变步态-仿真弹簧刚度
以上所描述的时间延迟,因此也不受控制器参数的影响的段运动的量。一种可能性是降低电机速度。然而,通常,它是更有趣的控制段运动的量,即段可以旋转甚至比电机实际允许。这当然是唯一可以实现的结构,其中有一个弹性联轴器的电机和段。生物腿允许这样的过度旋转由几个肌肉群的生物配置,其中一些是多余的,并具有不同的弹簧刚度。这种刚度可以调整到每个操作。在机器人的仿生驱动中,为每个不同的步态手动更换弹簧是不可行的。实施第二个电机的弹簧预应力的选项也不有趣,也没有吸引力,因为这将导致九个额外的电机为整个机器人,因此导致重量增加。弹簧刚度的实际调整的另一种选择,表示不同的触发电机。例如在小跑,一个跨步长度不足以传输电机位移的附加段。电机旋转回中性位置时,实际位移只占预置位置的一半左右。模拟弹簧刚度允许相同的运动序列,如果弹簧刚度进行了修改,通过交换弹簧。它控制电机真正旋转的数量。如果仿真弹簧刚度高于实际阻塞弹簧的刚度,电机可以达到更高的位移。要测试这一想法,我们使用了一个简单的模型组成的腿相同的运动设计。图5仿真和实际刚度的比较。该模型与仿真的刚度表示的灰度颜色,该模型与实际改变弹簧刚度由黑色的颜色。图显示髋关节、膝关节和踝关节的角度。刚度线性变化和数量0N /M在t = 20sec和20N/M的开始。可以很容易地认识到只有一个小的偏差之间的实际和仿真刚度。因此,所需的效果,可以实现无需手动更换弹簧对应于目前所需的刚度。在下面,我们提出了一种方法的方法使用模拟刚度。是fi内德在表一的方程用于积极的、中性的计算控制器的触发所需的变量,并设定位置和实际刚度计算如下:
表1.模拟弹簧刚度计算的输入和输出变量符号
micro;代表模拟刚度。O代表的偏移量和数量O = 10。在方程(1)和添加(2)是基于经验和作为一个更好的调整仿真,特别是8N/m相关间隔的实际刚度对16N / M。在关节端的仿生驱动中,仿真刚度的计算也是必要的。为了更详细地测试仿真的刚度,我们进行了进一步的测试,但是,不能在这里描述由于数量有限
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[27820],资料为PDF文档或Word文档,PDF文档可免费转换为Word

