
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
基于模糊控制的自平衡两轮车
陈家洪,钟汉恩,徐道祥
圣约翰大学电机工程系,纽约
摘要:在本文中,我们介绍了我们正在开发研究的低成本自平衡两轮车。我们主要研究了传感器控制板以及平衡控制器的设计。我们通过利用基于SUNPLUSTM SPCE061A EMU板和CPLD的嵌入式系统Altera EPM7128SLC84来集成传感系统和平衡控制系统,节约了科研经费。我们的设计主要有三个要点。首先,由于系统本质上不稳定,它可以作为控制相关课程的教学辅助工具,用于演示模糊控制器的各种控制方案的设计。其次,具有自平衡能力的两轮车既新颖又有趣,并且有可能成为玩具。此外,该试验提供了自平衡技术可行性的理论基础,并有希望研发出携带一个人的商用两轮车。
关键词:两轮车;平衡控制器;模糊控制;嵌入式系统
1 引言
目前,台湾存在空气污染,噪音污染和停车不便等严重问题。因此,电动汽车的发展在研究中备受关注。传统电动汽车的优点在于:噪音低,无污染,易于控制,其缺点是耐力不足,不易停放,体积大。然而,SEGWAY[1] 由Dean Kamen发明的两轮自平衡电动汽车不仅具有上述优点,而且缓解了大尺寸,停车困难和耐力不足的问题。两轮平衡电动车的关键技术是自平衡可控性,但这种两轮电动车太昂贵,无法在日常生活中广泛使用。
类似于用于控制两轮车辆的系统状态方程,JOE[6], [7]德国格拉瑟的研究团队于2001年利用陀螺仪测量车体倾斜的角速度和角度,通过电机编码器检测车身的方向和位置,将检测到的信息转换为系统状态方程,并通过解耦控制实现平衡,运动和转向控制。同年,美国工程师T. Blackwell开发了Balancing Scooter,成功应用了Atmel生产的直流伺服驱动系统的8位微控制器,实现了一人平衡运动和旋转。2005年,日立在日本推出了以赛格威为底盘的两轮机器人EMIEW [2]。其他日本研究人员,包括M. Sasaki,N.Yanagihara,O.Matsumoto和K. Komoriya联合开发了PMP(人物移动平台)。
台湾的研究团队也致力于开发两轮电动汽车。 2003-2007,王文军教授的团队分别以PC,DSP和NIOS为核心,采用模糊控制器开发了Hotwheels系列[4],可以通过遥控命令,保持车身自平衡,同步实现两个车轮,校准位置误差,前进,后退,转弯,爬坡和下坡的功能。在2005 - 2007年,蔡庆智教授的团队提出了一种以人体重量为载荷的自平衡两轮电动车[5]。
2005年,蔡明琦教授的团队报告了自动平衡两轮推车(ABTWC)[7]。这些研究反映了科学家们对环境保护的努力,也是本研究的动机之一。
本研究采用三维图形软件设计了两轮机构,并选用低功率驱动系统来增加两轮车的续航能力。本研究选用了符合该系统且价格低廉的传感器。感应系统由SUNPLUSTM SPCE061A芯片[3]和Altera EPM7128SLC84-15集成,作为自平衡系统的主要控制核心。设计了传感模块和主控制板。
感应信号通过SUNPLUSTM SPCE061A的嵌入式A / D转换器获取Altera EPM7128SLC84-15实验车辆的倾斜角度和实验车身的角速度。基于模糊控制算法和两轮同步控制器,通过产生电机转速指令对实验车辆进行自平衡控制。
对于模糊控制算法,输入变量由三角形隶属函数模糊化,并通过乘积推理机(PIE)和中心平均法去模糊化(CAD)应用于两轮系统,从而减少SUNPLUSTM SPCE061A芯片的计算时间,实现自平衡控制器和两轮同步控制器的运行。
2.车身机构设计和制造
智能两轮平衡车必须坚固并且能够承载重量,以便可以携带不同重量的驾驶员。还需要考虑设计和制造的安全性和便利性。因此,本研究采用3x3铝型材,设计组装了一人载智能两轮平衡车。
设计首先考虑电机,系统电路和电池的空间。设计平台尺寸为38cmtimes;33cmtimes;8cm,在最小的空间内完成所有组件的组装,进一步达到轻巧美观的效果。为了使电动机稳定并使其承载车辆上所有部件的重量,安装固定的摇枕板和轴向固定板,以有效地避免电动机轴的偏心运动。鉴于防滑和在崎岖不平的道路上行走,轮胎选择直径为40cm的充气轮胎。图2-1展示了两轮平衡车的图片。
|
|
|
|
图2-1 两轮平衡车 |
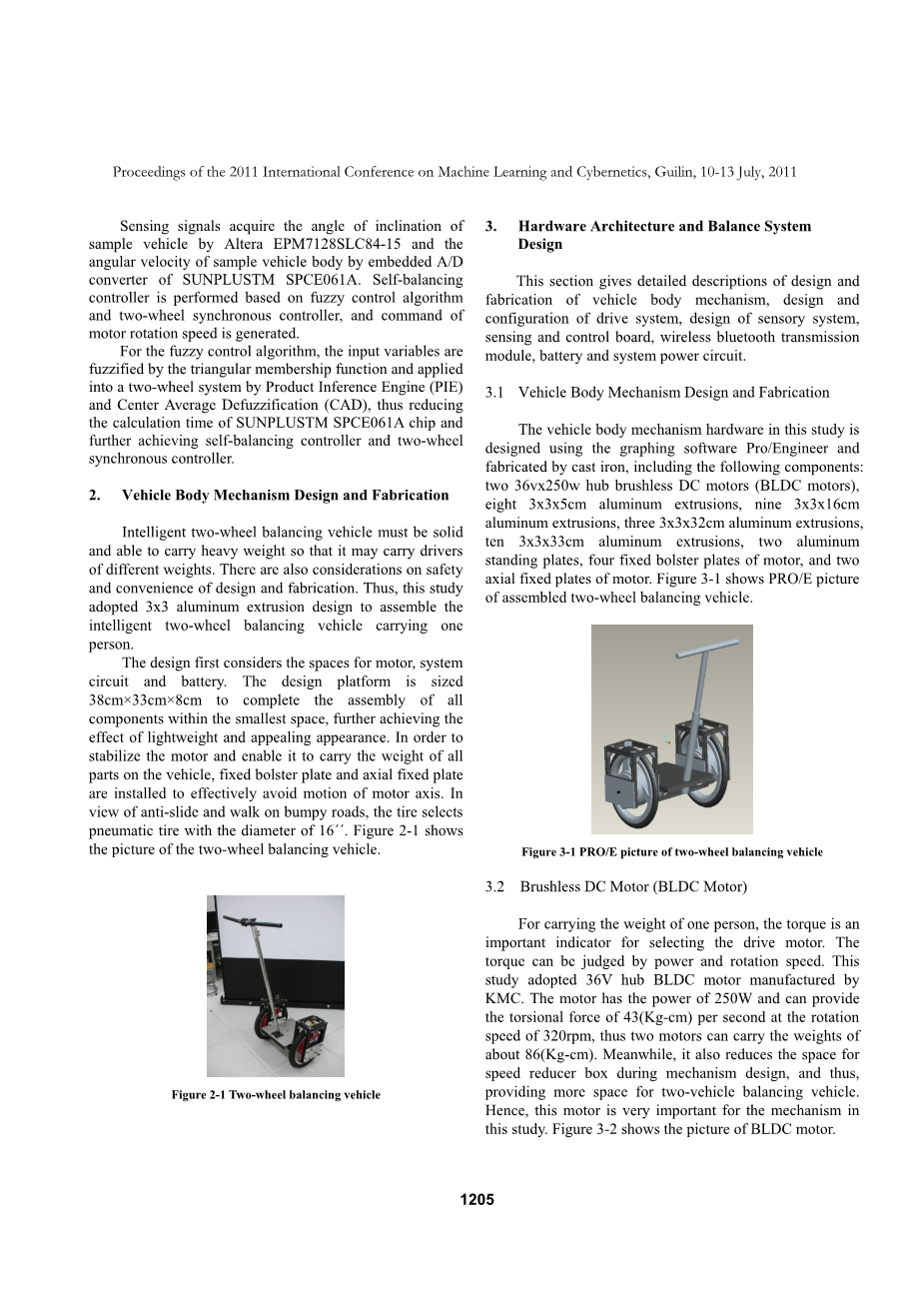
图3-1 两轮平衡车的PRO / E图 |
3.硬件架构和平衡系统设计
本部分详细介绍了车身机构的设计和制造,驱动系统的设计和配置,传感系统的设计,传感和控制主板,无线蓝牙传输模块,电池和系统电源电路。
3.1车身机构设计与制造
本研究中的车身机构硬件采用Pro / Engineer绘图软件设计,采用铸铁制造,包括以下部件:两个36vx250w集线器无刷直流电机(BLDC电机),8个3x3x5cm铝材器件,9个3x3x16cm铝材器件,3个3x3x32cm铝合金器件,10个3x3x33cm铝合金器件,2个铝制立板,4个电机固定垫板和2个电机轴向固定板。图3-1显示了装配好的两轮平衡车的PRO / E图。
3.2无刷直流电动机(BLDC电动机)
为了能够承载一个人的重量,扭矩是选择驱动马达的重要指标。可以通过功率和转速来判断扭矩。本研究采用KMC制造的36V轮毂BLDC电机。该电机功率为250W,在320rpm的转速下可提供每秒43(Kg-cm)的扭力,因此两个电机可承受约86(Kg-cm)的重量。同时,它还减少了机构设计过程中减速箱的空间,从而为双车平衡车提供了更大的空间。因此,这种设计对于本研究中的控制方式非常重要。 BLDC电机图如图3-2所示。
|
|
|
图3-2 BLDC电机 |
3.3 BLDC电机驱动系统
本研究采用TECO BL-300 BLDC电机驱动器,其特点是通过信号端COM点的短路或开路控制电机的转向,通过模拟电压控制电机的转速(0~5V) ),具有承受15A电流瞬时冲击的能力,以及过流保护和过热保护功能,如图3-3所示。
|
|
|
|
图3-3 TECO BL-300 |
图3-4 CRS03-02 |
3.4陀螺仪
为了控制两轮平衡车辆必须检测车身倾斜角度和角速度,以便清楚地知道车身倾斜的角度和方向。感知倾斜角速度有利于控制系统。该研究使用日本硅传感系统公司制造的CRS03-02,该系统基于科里奥利力原理,通过检测旋转物体的力的变化来检测车辆在运动中的角速度。其优点在于二氧化硅超细环形传感器芯片闭路的设计,输出抗冲击的高精度模拟电压。
它可以在plusmn;100°/ sec的范围内测量角速度,额定电压为5V,参考电压为2.5V,输出模拟电压信息的范围在[0.5V,4.5V]内,如图3-4。
3.5双轴加速度计
双轴加速度计的输出信号是固定为10ms的周期的脉冲宽度,正脉冲的宽度在3.7ms和6.3ms之间变化。检测方法是利用CPLD产生的12位计数器来计算正脉冲的宽度。如果宽度为0ms,则计数值为0;如果宽度为10ms,则计数值为4095.因此,正脉冲范围内信号的有效分辨率在[3.7ms,6.3ms]内为10位。如图3-5所示,其中计数值的物理意义是加速度,可以通过公式(1)转换为角度。
|
|
|
|
|
图3-5双轴加速电路示意图 |
3.6电机解码电路
本研究采用非接触式增量磁感应编码器,分辨率为5ppr。信号输出格式为Open Collector(OC)型,因此需要上拉电阻连接电源的正输入端和信号输出端,以接收电机编码器的信号输出。 2p DIP开关设计用于分辨电机解码器的信号输出,具有1X,2X和4X的能力。通过8bits接口将电机解码器的输出数据收集到SUNPLUSTM SPCE061A,如图3-6所示。
|
|
|
图3-6电机解码电路 |
3.7传感与控制系统设计
为了控制两轮车辆,必须测量两轮车辆的倾斜角度和角速度以及电机旋转的角度和角速度。本研究设计了一个传感和控制主板,利用SUNPLUSTM SPCE061A和CPLD提取陀螺仪和双轴加速器的信号。陀螺仪的输出信号是模拟电压。在SUNPLUSTM SPCE061A中嵌入一个10位A / D转换器,然后通过SUNPLUSTM SPCE061A反馈到车身倾斜角速度。双轴加速器输出的脉冲宽度信号可以通过CPLD中12位计数器测量的脉冲宽度,并进一步代入方程式得到两轮车辆的倾斜角度。此外,SUNPLUSTM SPCE061A用于控制HCTL-2032。
目前,电机旋转的角度和角速度已知,SUNPLUSTM SPCE061A通过8位数据母线向CPLD传输电机的PWM控制指令,产生约20KHz的PWM速度控制信号,驱动电机驱动器,进一步使电机运转顺利。考虑到传感系统的空间布局和模块化,SUNPLUSTM SPCE061A板使用电路连接方式连接到传感模块。图3-7显示了系统架构,图3-8显示了传感和控制集成板的图片。
|
|
|
图3-7传感和控制集成板的系统架构和图片 |
|
|
|
图3-8传感和控制集成板 |
4.自平衡控制器的实现
为了控制车身平衡,必须首先了解两轮车的运动模式,用双轴加速器检测车身倾斜角度,用陀螺仪检测车身倾斜角速度,用电机解码器检测电机的当前位置。最后,实现了车身平衡控制器的设计与实现。
4.1自平衡控制器
两轮车辆系统可实现的动作是多种多样的,包括直立,前进,后退,旋转,左转,右转,上坡和下坡。在实现各种动作之前,必须有一个好的平衡控制器。本研究为两轮系统设计了一个自平衡控制器,如图4-1所示。 Pc控制车身位置, Vc控制车身速度,Pcn是车身平衡的角度,Vcn是车身平衡的角速度。
|
|
|
图4-1自平衡控制器 |
4.2自平衡控制器的输入和输出
图4-1显示了自平衡控制器,包括两个输入和一个输出。输出是车身的角度误差A和车身角速度误差w。
|
eA(K)=Pcn(k-1)-PC |
(2) |
|
ew(K)=Vcn(k-1)-VC |
(3) |
Pcn(k-1)车体的倾斜角度,Vcn(k-1)车身倾斜的角速度是时间为t=k-1时的值。自平衡控制器的输出ub是两轮车辆的控制信号。如果ubgt;0,直流伺服电机向前驱动两轮车辆;如果ublt;0,直流伺服电机向后驱动两轮车辆。
4.3隶属函数
针对两轮车辆系统自平衡控制器输入输出的隶属函数,本研究利用三角隶属函数。每个域的隶属函数分为七个语言术语:NB(负大),NM(负中),NS(负小),ZE(零),PS(正小),PM(正中)和PB(积极的大)。输入和输出成员函数如图4-2,图4-3和图4-4所示。由角度误差的输入隶属函数的x轴表示的CPLD的计数值可以通过以下方程转换为角度:
由角速度误差的输入隶属函数的x轴表示的A / D转换器的计数值可以通过以下方程转换为角速度:
|
|
(5) |
CPLD产生的电机的PVM计数值由自平衡控制器的输入隶属函数的x轴表示,可通过以下公式转换为电压
|
|
(6) |
<t
剩余内容已隐藏,支付完成后下载完整资料</t
资料编号:[20533],资料为PDF文档或Word文档,PDF文档可免费转换为Word
|
|

