英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
智能控制和自动化,2011,2,330-339
doi:10.4236 / ica.2011.24038 2011年11月在线发布(http://www.SciRP.org/journal/ica)
使用LabVIEW通过PLC以太网控制交流电机
摘要
Nader N. Barsoum,Pin Rui Chin
科廷大学砂拉越校区电气与计算机工程系,马来西亚美里
电子邮件:nader.b@curtin.edu.my,chinpinrui@yahoo.com 2011年7月5日收到; 2011年7月26日修订; 于2011年9月3日接受
远程控制广泛领域的应用程序已经在当今的行业中普遍使用。 其中一个常见的应用需要远程控制和监视变频器馈电感应驱动系统。 驱动系统具有各种类型的控制器,以执行诸如控制电动机的速度,正转和反转方向等一些动作。 这种方法可以通过可编程逻辑控制器(PLC)完成,随着技术的兴起,以太网模块将用于实现远程控制系统。 此外,现在的PLC不仅可以使用其原始软件进行控制,还可以对第三方软件(如LabVIEW)进行控制。 LabVIEW是一个用户友好的人机界面设计软件。 它可以很容易地与不同的硬件进行通信。
关键字:LabVIEW,PLC,以太网,感应电机,OPC服务器,逆变器
介绍
过去,工程师一直在设计需要大量硬件的工程系统。 因为需要更多的硬件和布线,所以设计系统的距离控制是不可能的。 此外,如果工程师希望改进设计,所有不相关的硬件都需要废弃,这是不可持续的。
随着该技术的兴起,可编程逻辑控制器(PLC)已经放宽了工程设计并减少了所需的材料,这是因为整个设计都是以软件编程范式实施的。 工业上普遍使用PLC,包括控制感应电动机变频驱动系统。 现在即使使用以太网作为计算机和PLC之间的通信设备,设计距离控制机器也是可能的[1]。
除了通过自己的专有软件设计程序结构之外,PLC的便利部分是其他软件的可访问性和可控性。 请注意,此类软件必须具有特定PLC的驱动程序实用程序。 因此,工程师可以使用LabVIEW [2]来控制PLC,该LabVIEW具有各种类型的工业应用程序,这些应用程序均位于虚拟仪器(VI)中,而不是真正的重型仪器。
项目设计配置和准备
NI OPC服务器
NI OPC Server具有欧姆龙FINS以太网驱动程序,可以使OMRON CJ1M-CPU11-ETN21 PLC与LabVIEW通信。 欧姆龙原创 -
最终为客户提供FINS网关,与PLC和其专有软件OMRON CX-Programmer通过以太网进行通信的接口软件[3]。
通过NI OPC中的OMRON FINS以太网驱动程序,用户可以通过几个简单的设置来设置服务器,并创建可以直接链接到PLC寄存器的变量标签。 这些标签被命名为OPC标签。 NI OPC服务器还具有NI OPC快速客户端,使用户可以实时监控PLC的状态。 [3]。
只要OPC标签已经被创建,LabVIEW与PLC之间的通信就被简化了,因为驱动程序可以在标签正确配置的情况下自动应用相关的FINS命令[3]。 同时在LabVIEW中,可以使用链接到OPC标签的共享变量来设计程序。
LabVIEW的
NN BARSOUM ET AL。 331
公式节点,这些节点允许对需要复杂逻辑的代码的某些部分进行基于文本的编程
LabVIEW是Laboratory Virtual Instrumentation Engineering Workbench的首字母缩写,是一个图形化开发环境,用于以最低的成本快速生成灵活的可扩展设计,控制和测试应用程序。 利用LabVIEW,工程师和科学家可以与真实世界的信号进行交互,分析数据以获取有意义的信息,并通过直观的显示,报告和Web共享结果。 无论编程经验如何,LabVIEW都可以为所有用户快速而简单地进行开发[3]。
LabVIEW中使用的编程风格是G编程,它是图形编程的缩写。 它也被称为数据流编程,因为它取决于执行用户设计程序的图形框图的结构。 与基于文本的编程相比,LabVIEW用户友好,因为用户可以通过简单地安排和连接相关图标来设计程序[3]。 LabVIEW程序被命名为虚拟仪器或VI,因为它们的外观和操作模仿物理仪器,如示波器和万用表[4]。 与其他传统编程类似,LabVIEW具有循环结构,数据结构,事件处理,面向对象编程等标准功能。 LabVIEW也有类似于MATLAB库的广泛的数学函数库
结构。 除此之外,LabVIEW还具有网络库功能,可以很容易地让用户参考[3]。
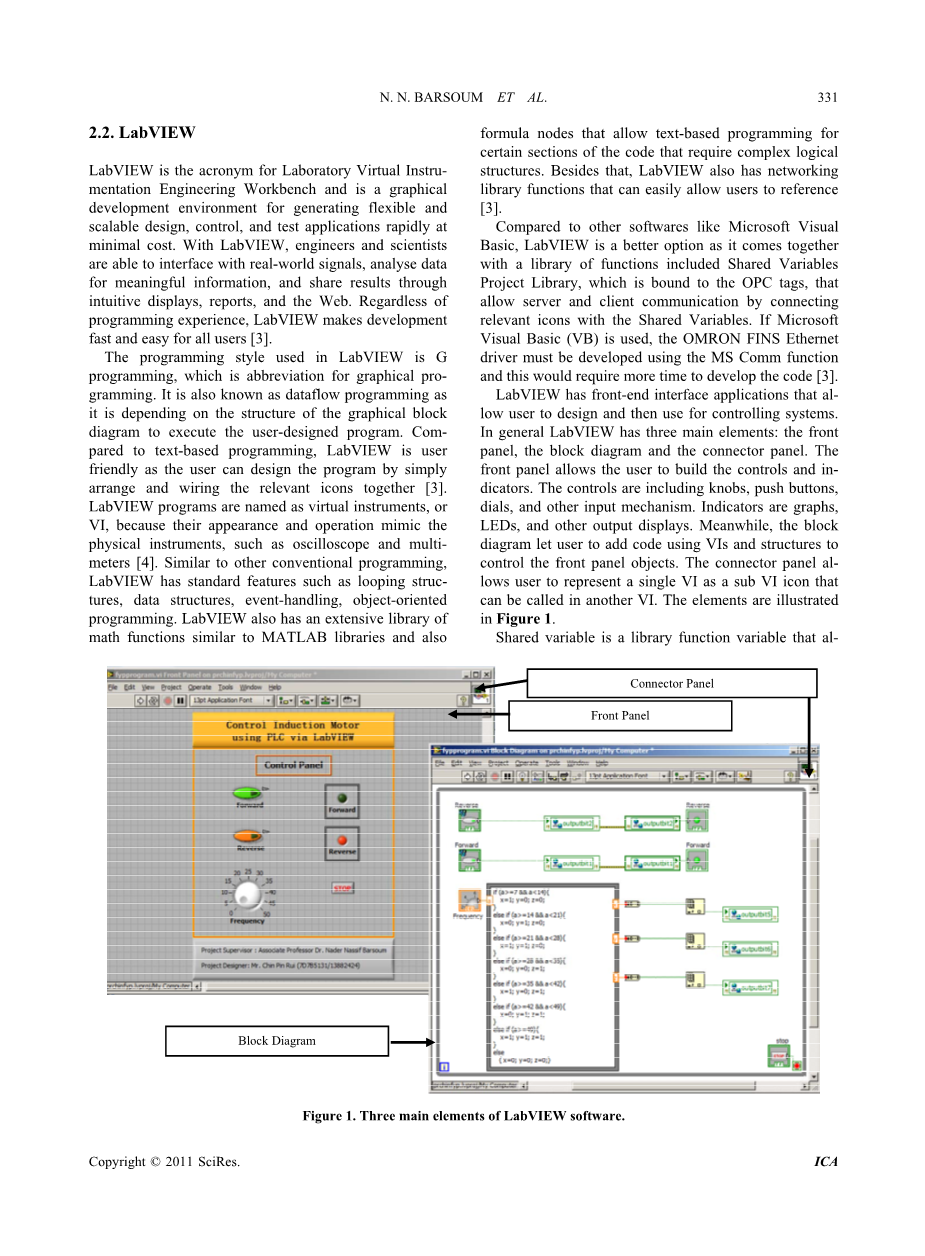
与其他软件如Microsoft Visual Basic相比,LabVIEW是一个更好的选择,因为它与包含共享变量项目库的函数库一起使用,该函数库绑定到OPC标签,允许服务器和客户端通过连接相关图标和Shared变量。 如果使用Microsoft Visual Basic(VB),则必须使用MS Comm功能开发欧姆龙FINS以太网驱动程序,这需要更多时间来开发代码[3]。 LabVIEW具有前端接口应用程序,允许用户设计并用于控制系统。 通常,LabVIEW有三个主要元素:前面板,方框图和连接器面板。 前面板允许用户构建控件和指示器。 控件包括旋钮,按钮,拨号和其他输入机制。 指标是图表,LED和其他输出显示。 同时,框图让用户使用VI和结构添加代码来控制前面板对象。 连接器面板允许用户将单个VI表示为可以在另一个VI中调用的子VI图标。 图示了这些元素
在图1中。
共享变量是一个库函数变量,
前面板
连接器面板
框图
图1. LabVIEW软件的三个主要元素。
332 NN BARSOUM ET AL。
在应用程序或网络上的不同数据源之间共享数据。 LabVIEW中有许多现有的数据共享方法,如UDP / TCP,LabVIEW队列和实时FIFO。 与Datasocket通信相比,使用共享变量是用户友好的,因为可以通过库中的简单设置来完成配置,而不必编写URL并在Datasocket Communication [3,5]中执行更多布线。
可编程逻辑控制器
用于执行的PLC是欧姆龙CJ系列。 该PLC使用4台电源单元(CJ1W-PA202),带以太网功能的CPU单元(CJ1M-CPU11-ETN21),基本输入单元(CJ1W-ID211)和基本输出单元(CJ1W-OC211) 。
PLC单元有一个端盖。 所有这些单元可以通过将它们组装在一起来连接,并通过将滑块移向单元的后部来锁定滑块。 端盖必须连接在PLC的最右侧。 否则会发生致命错误[6]。
图2演示了PLC单元的布局。
为了让PLC通过以太网进行操作,必须为PLC分配一个IP地址,其中包含的目标节点号(DA1)不是网络中其他IP地址的DA1的副本。 目标节点号也被称为IP地址的最后一个字节。
PLC节点编号通过转动CJ1W-ETN21模块上的拨号进行配置,如图3所示,除了目标节点地址(DNA)[3]外,PLC还必须在网络中被赋予一个单元编号。
节点号times;16\是节点地址的最高有效位(MSB),而times;16\是节点地址的最低有效位(LSB)。 IP地址为十进制形式,因此在软件配置中对PLC以太网模块的DA1的引用必须为十进制。 要将任何十六进制数转换为十进制数,可应用以下示例[3]:
对于本文中描述的实现,PLC配置了IP地址10.1.136.46。 该路由器适用于个人家庭网络。 因此,与网络中的设备相关联的IP地址被归类为C类。
变频驱动
欧姆龙SYSDRIVE 3G3MV-A2007变频器是一种变频器,可用于改变供给电机的电功率,以改变电机转速[6]。
图2.该项目中PLC单元的连接[7,8]。
NN BARSOUM ET AL。 333
图3. CJ1W-CPU11-ETN21硬件配置。
SYSDRIVE 3G3MV-A2007变频器适用于各种应用,因为它集成了许多方便的控制和易于使用的I / O功能以及开环矢量控制功能。 矢量控制功能的优点是在输出频率为1 Hz的情况下,可以确保转矩输出为额定电动机转矩的150%,并允许在低频下强大的旋转并抑制由负载引起的旋转波动[6]。
需要配置3G3MV变频器的功能参数列表,以有效控制三相鼠笼式感应电机。
履行
实施过程
本文介绍的以太网控制系统是控制鼠笼式三相感应电动机。 为了实现这些目标,建立PLC和LabVIEW之间的通信至关重要,因为LabVIEW是第三方软件,而不是使用PLC本身实现的软件。 因此,该实现使用LabVIEW来执行电机的启动和停止操作,无论是正向还是反向,并通过改变电机频率来改变速度。 但是,这个系统不是监控和数据采集(SCADA),因为没有从电机的实际输出获取实际的数据测量结果。
该系统具有图4所示的三层网络架构。
如图5所示,用户可以通过主计算机(这是一台笔记本电脑)进行控制。 然后用户输入的数据将转换为布尔数据,并通过以太网电缆和路由器发送到CJ1M-CPU11-ETN21可编程逻辑控制器。 一旦布尔数据已经被PLC处理,PLC的基本输出中的相关地址将被打开。 此过程允许3G3MV变频器/变频器根据用户提供的输入数据操作三相鼠笼感应电动机。 此外,由于输入电源为单相电源,因此3G3MV变频器/变频器也可用作电源单元和电机之间的逆变器,而松鼠笼式异步电机则以三相电源工作。
VI设计的实现
本文中VI程序的目标是允许用户在正向或反向方向上决定电机的启动和停止操作,并通过改变电机的频率来改变速度,方法是执行两个简单的操作步。 首先通过按下VI前面板上的按钮来选择转动方向,该按钮可以是正向或反向。 其次,通过将频率旋钮转到用户需要的频率值来改变速度。 图6显示了VI前面板。
334 NN BARSOUM ET AL。
图4.三层网络体系结构
图5.实际的网络配置。
在运行VI之前,确保所有硬件都已打开并正确配置,并启动NI OPC快速客户端,以便可通过此VI中的共享变量浏览OPC标签。
在实现中创建并使用了5个OPC标签,标签的详细信息列在表1中。
通过参考图6,绿色按钮是确定电动机正向转动的开关。 同时,橙色按钮是确定电机反向转动的开关。 绿色和橙色的指示灯在右侧
侧显示按钮是否已打开。 标记为“频率”的旋钮是控制电机频率和速度的关键程序。 标有“停止”功能的按钮可以停止程序的执行。
图7说明了VI程序框图,它是VI的编程部分。 通过参考图7,具有虚线的红色方框是在前面板和方框图中可见的VI组件。 例如,按钮,旋钮,指示灯。 同时,没有虚线的红色方框是可见的VI组件
NN BARSOUM ET AL。 335
表1. OPC标签的详细信息及其与变频器的连接。
|
OPC标签名称 |
PLC地址 |
3G3MV逆变器 |
|
|
连接终端 |
终端名称 |
||
|
输出位1 |
CIO0001.01 |
S1 |
多功能输入1(正转/停止) |
|
输出位2 |
CIO0001.02 |
S2 |
多功能输入2(反转/停止) |
|
输出位5 |
CIO0001.05 |
S5 |
多功能输入5(多段速度给定1) |
|
输出位6 |
CIO0001.06 |
S6 |
多功能输入6(多段速度给定2) |
|
输出位7 全文共7679字,剩余内容已隐藏,支付完成后下载完整资料 资料编号:[2550] |
|||

