英语原文共 18 页,剩余内容已隐藏,支付完成后下载完整资料
CRONE控制器的PLC实现
Patrick Lanusse1,Jocelyn Sabatier2
摘要
分数复数阶积分器自1991年以来一直用于设计鲁棒控制系统。 在CRONE控制方法中,它允许开环传递函数的参数化,该函数在鲁棒性环境中进行了优化。 一个用于MATLAB的CRONE控制系统设计工具箱已经开发了好几年。 它由4个主要部分组成。 “CRONE CSD引导启动”装置是首选装置,因为它有助于选择需要使用哪一种第一代,第二代或第三代CRONE CSD装置。 控制器通常使用环路开发套件或数字信号处理器中的硬件来实现。 在本文中,我们提出设计一个液压系统的鲁棒控制器,然后将其实现为可编程逻辑控制器(PLC)。
MSC 2010:93Cxx,93B52,47N70; 26A33,58E25,93D09
关键词和短语:CRONE控制,CSD工具箱,可编程逻辑控制器(PLC)实现
lowast;2010年10月18日至20日在西班牙巴达霍斯埃斯特雷马杜拉大学举办的IFAC分阶段衍生物和应用研讨会(IFAC FDA#39;2010)上,部分介绍了该工作。
引言
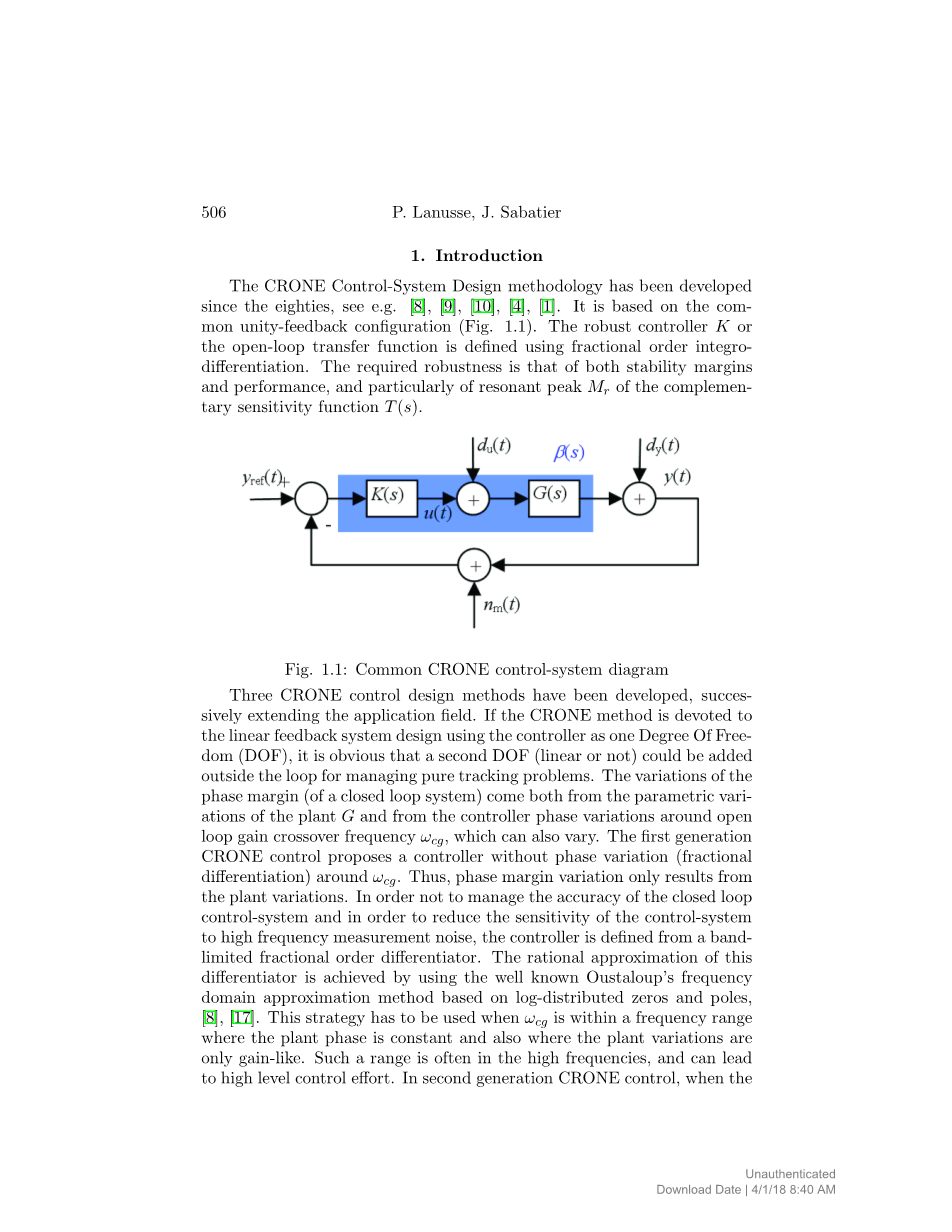
CRONE控制系统设计方法自八十年代开发以来,见例如[8], [9], [10], [4], [1]。 它基于常见的统一反馈配置(图1.1)。 鲁棒控制器K或开环传递函数使用分数阶积分微分来定义。 所需的鲁棒性是稳定裕度和性能的稳健性,特别是互补灵敏度函数T(s)的共振峰Mr。
图1.1:普通的CRONE控制系统图
已经开发了三种CRONE控制设计方法,逐步扩展了应用领域。 如果CRONE方法专用于使用控制器作为一个自由度(DOF)的线性反馈系统设计,则显然可以在循环外部添加第二个DOF(线性或非线性)以管理纯跟踪问题。 (闭环系统的)相位裕度的变化既来自设备G的参数变化,也来自开环增益交叉频率omega;CG附近的控制器相位变化,其也可以变化。 第一代CRONE控制提出了一个omega;CG附近没有相位变化(分数模数化)的控制器。 因此,相位裕度变化只是由于设备的变化造成的。 为了不管理闭环控制系统的精度以及为了降低控制系统对高频测量噪声的灵敏度,控制器被定义为带限分数阶傅立叶变换器。 通过使用基于对数分布零点和极点的众所周知的Oustaloup频域近似方法来实现这个解模器的有理逼近,[8], [17]。 当omega;CG处于设备相位恒定的频率范围内时,以及设备变化仅具有类似增益的情况下,必须使用此策略。 这样的范围通常处于高频率,并且可能导致高水平的控制。 在第二代CRONE控制中,当PLC实现一个CRONE控制器 507
设备变化在omega;CG附近增益,设备相位变化(相对于频率)被控制器的相位变化所抵消。 因此,当频率omega;CG变化时,不存在相位裕度变化。 这种控制器提供了一个恒定的开环相位(实数分数阶积分),其Nichols轨迹是一条垂直直线,称为频率模板。 它显示非常接近开环频率响应,由[2]。 该模板确保了相位和模量余量以及互补灵敏度和灵敏度函数的谐振峰值的稳健性。 当工厂不确定性是各种类型时(不仅是类似收益的),必须使用第三个CRONE控制代。 然后用一个广义模板替换垂直模板,该模板总是在Nichols图表中描述为一条直线,但任何方向(复数分数阶积分)[9], [10], [3], [4]。 优化允许确定标称开环传递函数的独立参数。 这种优化是基于稳定度变化的最小化,同时考虑到灵敏度函数幅度约束考虑的其他规范。 复数分数阶允许使用少量高级参数对开环传递函数进行参数化。 因此,它使得需要使用的非线性优化更容易。 最后,相应的CRONE控制器被合成为理想的传递函数,使得期望的频率响应最好。 第三代CRONE CSD方法能够为具有右半平面零点或极点,时间延迟和/或轻微衰减模式的设备设计控制器[11], [13]。 CRONE控制也已扩展到线性时变系统,请参阅[14], [15], [16]。 对于多变量工厂,两种方法已经在[5], [6], [12], [7]。 该方法的选择(多SISO,分散式或完全MIMO)是通过分析电厂耦合率来进行的。
本文旨在介绍如何将CRONE控制器设计和实现为可编程逻辑控制器(PLC)。 PLC连接到需要控制油箱气压的液压系统。 三种CRONE方法可以在MATLAB / Simulink框架中轻松使用。 一个用于MATLAB的CRONE控制系统设计工具箱已经开发了好几年,并且很快就可以作为SISO系统的免费软件。 它由4个主要单元组成:“CRONE CSD引导启动”单元,帮助选择要使用的CRONE代; 第一代,第二代和第三代CRONE CSD装置。 第2节介绍了一个要控制的液压系统,以及CRONE CSD工具箱如何设计强健的CRONE控制器。 第3节介绍了PLC,控制器如何实现以及获得的性能。
508 P. Lanusse,J. Sabatier
用于液压系统的CRONE控制器的设计
Festo Compact工作站(图2.1)配有液位(LIC
流率(FIC 501.1),压力(PIC 103)和温度(TIC 104)传感器,离心泵(P101)和加热(E 104)执行器。
图2.1:Festo紧凑型工作站
CRONE控制器的PLC实现 509
图2.2:紧凑型工作站的传感器和执行器,水(蓝色)和压缩空气(橙色)路径
对于这项工作,离心泵用于控制罐内加压空气的测量压力(B103)。 只有V103和V108阀门打开,其他阀门关闭。 阀门V107有时会打开以改变水箱中的水/空气比。
动态行为建模
对于两个极端的水/空气比率,当泵速改变时记录空气压力的变化(图2.3)。
输入u的100%通过10 V泵电压uv获得。 传感器压力/电压增益为1/40(400毫巴10 V)。 测量噪声约为0.1V峰峰值。 图2.3显示,只有当u大于40-50%时,系统才具有动态行为。 即使这个系统是非线性的,对于一组工作点(u的5个值和水/空气比的2个值),这些测量值已经被用于确定其频率响应如图2.4所示的线性模型。 用于对系统建模的传递函数是二阶函数,静态增益在0.04和0.1 V%之间,固有频率在1.9和4.2 rad / s之间,阻尼系数在0.7和0.9之间。
510 P. Lanusse,J. Sabatier
图2.3:输入为u的泵的测量压力y
介于0和100%之间(增量为10%)和小(下)和大(上)水/空气比
性能规格
控制系统是数字式的(在PLC中实现)并且采样周期Ts等于50ms。 对于所有可能的参数状态,控制系统必须满足以下性能规范:
yREF(20mbar)的1/2 V变化的阶跃响应,超调减小,建立时间尽可能小
bull;
电厂输入端的噪声u低于峰峰值的10%(噪声测量nm约为0.1 V峰峰值)
bull;
- 没有恒定扰动du的稳态效应。
PLC实现一个CRONE控制器 511
图2.4:一组工作点的G(s)= Y(s)/ U(s)的频率响应
CRONE CSD一代的选择
由于CRONE设计使用连续时间频域方法,计算所有可能的G(s)植物模型的z变换G(z),然后通过使用双线性w变量变换将其移动到伪连续时间域通过:
Zmacr;sup1;=(1-W)/(1 W) 或 W=(1-Zmacr;sup1;)/(1 Zmacr;sup1;) ( 2-1)
⎩
和 W=JV=tan(w*Te)/2 (2-2)
2
其中v是一个伪频率。 包含在计算中的零阶保持导致非最小相位G(w)(在 1的一个右半平面零点)。 图2.5显示了扰动系统的Nichols图和被选作名义系统的Nichols图。 由于工厂和规格分析显示可达到的带宽约为v = 0.05(2 rad / s),“CRONE CSD引导启动”单元建议使用“第三代CRONE CSD”单元(增益和相位变化大约为2 rad / s)以设计一个鲁棒控制器。
512 P. Lanusse,J. Sabatier
图2.5:扰动植物G(w)的Nichols轨迹
2.4 3RD代CRONE控制器的设计
考虑到工厂和性能规格,要优化的标称开环定义如下:
⎩
通过最小化获得最佳的开环传递函数
的鲁棒性成本函数
J = sup T(jnu;) Mr0, (2.4)
| | minus;
nu;,G
其中Mr0= 1.74dB是标称对数的期望谐振峰值,
在考虑所有工厂(或工厂的参数状态)以及visin;R 的下列一组不等式约束的情况下:
PLC实现一个CRONE控制器 513
K(W)G(w)的 1
T(w)=1 K(w)G(w),S(w)=1 K(w)G(w),
图2.7提供了辅助设计界面,允许首次调整开环参数。 目标是形成一个对称的开环Nichols轨迹,该轨迹提供尽可能健壮的闭环。 该工具箱还建议通过使用fmincon Matlab函数来实现优化,该函数考虑了由方程(2.5)。 我们选择优化的四个参数是:拐角频率vminus;1和V0; 标称共振频率vr和相切的纵坐标Y0指向所需的M轮廓。 对于这四个参数的每个集合,计算0,b0,q0和K,使得beta;(jv)在纵坐标Y0处的Mr0M轮廓与频率v r。
图2.6:“第三代CRONE控制系统设计”单元的打开窗口
514 P. Lanusse,J. Sabatier
图2.7:辅助设计界面,通过调整开环参数允许第一个环形成形
优化的参数值为:Y0= 5dB; Vr= 0.05; V0= 0.01; V1= 0.7。 因此,a0= 1.32,b0= 0.48,q0= 1,alpha;0= 5.08和K = 18.08。 成本函数的最终值为null,并验证所有ve约束。 图。
2.8将受干扰的灵敏度函数与性能约束进行比较。 鲁棒性/性能权衡的良好管理通过稳定度(零成本函数)的完美鲁棒性和非常接近性能约束的敏感度函数来证明。
PLC实现一个CRONE控制器 515
图2.8:与性能约束( - - - )相比的闭环灵敏度函数(标称和极限)
从最佳标称开环传递,分数控制器
KF(w)的频率响应为:
其中G0(jv)是电站的标称频率响应。 然后,控制器的有理传递函数KR(w)可以通
过近似由等式2.7)。 有理控制器KR的形式如下:
TT
其中K0是增益,NDIFF,n和oi是整数阶,vi
频率和zeta;i是
全文共8081字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[17352],资料为PDF文档或Word文档,PDF文档可免费转换为Word

