英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
彩色渐变网络引导下的彩色图像分段
拉斐尔·F·贝托尔迪,丹尼尔·D·阿巴达,米迦勒·M·李希特
图像处理和计算机图形学实验室-LAPIX,CS系,圣卡塔琳娜联邦大学- UFSC,Floriano波利斯,SC,巴西 计算机视觉与模式识别小组,德国穆斯特大学卡尔加里大学CS系,卡尔加里,阿尔伯塔,加拿大
摘要:现有的区域生长分割算法主要基于静态相似性概念,其中只有一个区域内的像素或纹理的均匀性起作用。然而,典型的自然场景表现出强烈的连续的颜色变化,呈现出一种动态的顺序,这是不存在的现有算法,它将分割具有不同强度的天空和蓝色或不规则的照明表面的色调作为一组不同的区域。我们提出并验证了一种新的,非常简单的方法,当应用于这样的场景时,显示出非常满意的结果,而当应用于标准区域生长问题时,没有表现出比传统方法更差的性能。
关键字:区域生长分割;自然彩色场景;颜色渐变网络
引言
彩色图像分割算法是计算图像分析和计算机视觉两个重要的应用领域。他们的主要目标是根据图像的颜色,识别图像中相似特征的均匀区域或区域,特别是相对于它们的颜色强度。当我们打算实现一个可以与人类视觉紧密地比较的结果时,这一系列算法变得非常重要。当前算法的一个基本问题是通过简单的连续像素邻域相似性来计算SIM度标识。当我们考虑,例如,这种方法会导致错误。晴空万里的蓝天。天空在上部呈现出较深的蓝色强度,并在下部逐渐逐渐降低为较浅的蓝色。在大多数当前算法中,这种强度变化将被识别为多个区域,而人眼只看到一个区域,即天空本身,识别变化中的顺序。基于连续梯度关系分析的图像分割算法的目的是克服这一缺点。我们把这种方法称为梯度网络分割方法,本文给出了迄今为止的方法和结果的概述。
- 基于颜色渐变的网络分割
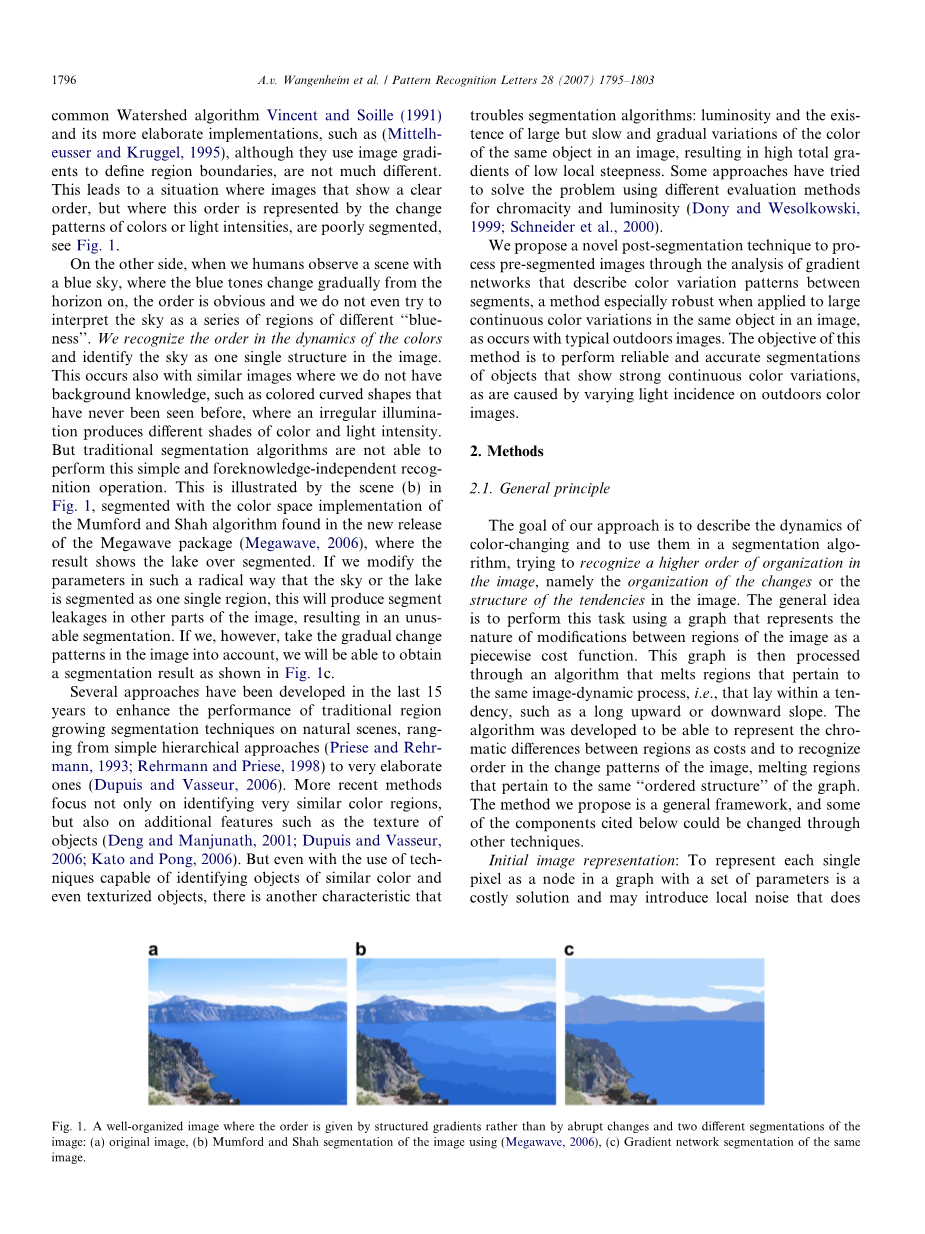
传统的区域生长分割算法,为了产生图像的最佳分割,即最佳分割图像,依赖于图像中高熵的岛屿的搜索,即没有发生变化的同族区域。芒福德和沙阿分割算法(芒福德和沙阿,1989)是这种方法的最好的例子。更常见的分水岭算法文森特和SoeLee(1991)及其更详细的实现,如MITTEH-EUSER和KRUGGEL,1995,虽然它们使用图像梯度到DENE区域边界,但并不多。这导致了一种情况,其中显示出清晰顺序的图像,但是该顺序由颜色或光强度的变化模式表示,其分割很差,见图1。另一方面,当我们人类观察到一个蓝色天空的场景,蓝色音调从地平线上逐渐改变时,秩序是显而易见的,我们甚至不试图把天空解释为一系列“蓝色”的区域。我们认识到颜色的动态顺序,并将天空识别为图像中的一个单一结构。这也发生在我们没有背景知识的类似图像中,例如以前从未见过的彩色曲线形状,在那里,不规则的照明产生了不同颜色和光强的阴影。但是传统的分割算法不能进行简单的和预知识独立的恢复操作。这是由图1中的场景(b)示出的,与芒福德和SHAH算法的颜色空间实现相分离,在MeGaWAVE包(MeGaWAVE,2006)的新版本中发现,结果表明湖超过分段。如果我们以这样一种激进的方式修改参数,即天空或湖泊被分割为一个单一区域,这将在图像的其他部分产生片段泄漏,从而导致无法分割的分割。然而,如果我们考虑图像中的渐变模式,则能够获得如图1C所示的分割结果。在过去的15年中已经开发了几种方法来提高传统的区域生长分割技术在自然场景上的表现,从简单的分层方法(Priese和Reer-Mn,1993;ReReman和Price,1998)调用到非常精细的分割(DuPUI和V)。阿瑟尔,2006)。最近的方法不仅着眼于识别非常相似的颜色区域,而且还关注附加的特征,如物体的纹理(邓和Mununthas,2001;DuPUI和VaseUR,2006;加藤和Pong,2006)。但是即使使用能够识别相似颜色物体甚至是纹理物体的技术,THAUTHOBLE分割算法的另一个特点是亮度和图像中同一物体颜色的大而缓慢和渐变的特性,从而导致高局部梯度的局部梯度变大。一些方法试图用颜色和光度的双重评价方法来解决这个问题(Doand and Weelokkosik,1999;Schneider等人,2000)。我们提出了一种新的后分割技术,通过对描述片段间颜色变化模式的梯度网络的分析来处理预分割图像,当应用于图像中相同对象的大连续颜色变化时,该方法尤其健壮。具有典型的户外图像。该方法的目的是执行可靠的和准确的分割对象,显示强烈的连续颜色变化,是由于不同的光入射在户外彩色图像。
- 方法
2.1一般原则
我们的方法的目标是描述颜色变化的动态,并在分割算法中使用它们,试图识别图像中更高层次的组织,即图像的变化的组织或倾向的结构。一般的想法是使用一个图来表示这个任务,该图表示图像区域之间的Mudii阳离子的性质作为分段成本函数。然后通过一种算法来处理该图,该算法将属于同一图像动态过程的区域(即在十度内,例如长向上或向下倾斜)熔化。该算法能够将区域之间的混沌二值作为代价来表示,并在图像的变化模式中识别顺序,即与图的“有序结构”相同的熔化区域。我们提出的方法是一个通用的框架,下面引用的一些组件可以通过其他技术来改变。
初始图像表示:将每一个像素表示为具有一组参数的图中的节点是一个昂贵的解决方案,并且可能引入局部噪声,这对区域颜色变化趋势的区域估计没有贡献。因此,我们使用区域分割作为预处理步骤,它将表示静态区域,即在一组参数内作为一个对象的值均匀的区域。这组参数将是域和预分割方法相关的,并将在下面讨论。
由这个预分割产生的每个对象将被认为是原子区域。这种分割应该用这样的吝啬参数来执行,即所得到的图像是分段的并且没有发生片段泄漏。然后在这个过分割图像上建立梯度网络,每个原子区域被重新作为梯度图中的节点。在我们的实现中,我们选择了芒福德和Sah函数(芒福德和Shanh,1989)用于预分割,因为它的健壮性和结果质量,但是可以使用更快的方法,例如分裂和合并,分水岭(文森特和Soelle,1991),甚至CSC(PRI -ESE和RE)。Hrman,1993),因为一个不搜索一个分割,而是用于均匀结构中像素的预分类。对于我们的验证,我们试图设计一组稳定的参数的芒福德和SHAH算法,没有产生任何段泄漏,并在整个实验中使用它们.
相似性度量:被认为是同质的将被阈值去除。原则上,相似性度量比较了当前被认为是均质的两个这样的区域,测量区域相对于均质性的程度有多接近。这些区域在图中表示,相似性度量的作用是为连接相邻区域的每个边缘提供成本。细节将在第2.2节中给出。
在初始分割的情况下,相似性度量计算也是框架中的槽,其中可以使用许多不同的相似性度量。在本文中所描述的实验中,我们选择了在图像场景中明确和粗略的颜色感知区域,如最初由(黄等人,2006)所讨论的,提高了颜色相似性度量对镜面光和阴影的鲁莽性。这个想法是为了增强鲁莽性,在存在强烈的亮度变化,通常与现实世界的图像。除此之外,阈值将起到重要的作用。下面将给出对该算法的更正式的描述。
2.2.梯度网络法的描述
使用预分割图像作为输入数据。它是用这样的保守和过度敏感的参数产生的,以避免该图像中的片段。在图像中从一个物体泄漏到另一个物体。与输入图像一起,作为参数传递两个阈值。这些阈值,TCP和TRP,将用于验证应用于相似函数的颜色梯度的结果是否可以根据与所使用的阈值相关的感知而平滑地接受。在该输入图像中的所有段都被标记。通过连通图G(V,E)表示区域及其邻域关系。预分割输入图像中的标记区域将是图的顶点V,这些对象之间的邻域关系将被作为图的边E来表示。V将被称为Atomic Regions的集合。该图将始终是连通图,因为由顶点表示的所有区域都包含在同一图像中,并且通过链接相邻区域的边缘,可以从任何给定顶点中的任意一个顶点到达任何一个顶点,因为可以从任意PI中获得路径。XEL P1到同一图像中的任何其他像素P2。然后,给定连通区域的图G(V,E),它可以如下所示: V frac14; fv 2 V j8eth;eth;x1; y1THORN; c vTHORN; ^ eth;:9eth;eth;x2; y2THORN;c vTHORN;^ leth;x1; y1THORN; leth;x2; y2THORN;THORN;g每一个顶点V代表一个原子Re- GIon,在正交轴X和Y中包含一对有序的COODI- NATE(X,Y)。对于所有这些包含的有序的坐标对(X,Y),它们在标记的输入图像中所代表的位置都将具有相同和唯一的V。ALL,其中L是一个函数,它给出标记图像中GIV-VEN坐标对(x,y)的标签值E frac14; fe 2 Ejeth;v1; v2 2 V THORN;^ eth;v1 v2THORN; ^ 9eth;eth;eth;x1; y1THORN; c v1THORN;^ eth;eth;x2; y2THORN; c v2THORN;^ eth;N 8eth;x1; y1THORN; s eth;x2; y2THORN;THORN;THORN;g 其中每边E 2 E由一对V1、V2 2 V形成,并且在这两个顶点之间至少有一对位置(x1,y1)c v1和(x2,y2)v2,它们显示一个8连通的邻域。(3)在算法的下一个阶段,每个顶点V2V与一个新的和唯一的元区域M M相关联。Meta区域是逻辑容器,用于存储在它们之间具有路径的一组区域,并通过被认为是ACC的颜色梯度链接。根据所提出的相似性度量EPTIT。梯度网络方法的目标是合并元区域。所有元区域将表现为连接的子图,这意味着由给定元区域所包含的任何顶点至少有一个路径也包含在同一元区域中的任何其他顶点。其中每个元区域M 2 m由顶点V 2 V的集合形成,顶点V 2 V根据TC阈值在顶点V1、V2、V对之间具有可接受的平滑梯度。任何顶点vi只能属于一个元区域,算法然后通过图G(V,E)在连接顶点的边E 2 E中运行。V1,V2 2 V的梯度平滑足以被认为是可接受的,根据这一边缘的感知,导致这些顶点在同一元区域M 2米的结合。目标是验证这两个区域是否可以放置在同一元区域M中,这意味着这两种方法都被认为是相似的。如果顶点已经被相同的元区域M 2 M所包含,则没有理由继续验证,因此该过程继续进行,如果仍然存在,则继续进行到另一个unVIEI边缘。边缘被标记为VRIE ED。每个边仅被检测一次,如果两个顶点不在同一元区域m M中,则将确定应用于该链路的感知类型。感知理念是基于(黄等人,2006)中发现的概念,其中使用颜色感知的二度来增强图像中的对比度评价。有了这些每一个注意点和它们提供的特征,使得该方法更容易改变场景中的光照和阴影的存在。这也是一个有趣的概念,因为物体中颜色的平滑变化问题直接与光照有关,这种类型的评价通过感知是处理这类特征的有力工具。在我们的算法中,我们使用两种感知:(1)清晰的感知,其中有良好的色彩饱和度和平均亮度水平。(2)粗略感知,其中有低色SAT,或非常高或非常低的强度。顶点的颜色值被转换为HSL颜色模型,由三个正交轴组成,分别表示色调、色度和亮度。目前,这两种感知的接受水平都是作为色调、饱和度和亮度值接受的范围,因此(黄等,2006)。这些范围必须划分HSL值可以假设的范围,即一个区域被分类为具有清晰或粗略的感知。这些参数将允许更好地对图像场景的照明条件进行分割。方程需要两个顶点作为输入定理。这些都将是相邻区域,这是因为输入的像素是从图的边缘中提取的,并且从这个边缘继承这个属性。在给定顶点和感知梯度的情况下,根据所使用的阈值Tc de de NED参数来检查是否与评价函数FC找到的值是可接受的。函数的定义是。8 ..R H eth;v THORN; . .R H eth;v THORN; .Sigma;gt; cp Seth;v1THORN;— Seth;v2THORN;j thorn; ccp m jLeth;v1THORN;— Leth;v2THORN;jgt;
gt;lt; thorn;b m j
perceptionclearrp m jSeth;v1THORN;— Seth;v2THORN;j thorn; crpm jLeth;v1THORN;— Leth;v2THORN;jperceptionrough 其中FC是平滑梯度评价函数并以两个顶点V1、V2 V为参数。函数H、S、L取顶点V V作为参数,从顶点V包含的图像中的像素位置的颜色值,分别给出色调、饱和度和亮度的平均值。COE证书A、B、C分别对应于感知到色调、饱和度和亮度所需的相关性。这些COE参数也是算法的参数。在成功的情况下,意味着结果比阈值Tc小,在与这些顶点V1、V2 V相关联的元区域M1、M2 2 M之间进
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[22107],资料为PDF文档或Word文档,PDF文档可免费转换为Word

