
英语原文共 21 页,剩余内容已隐藏,支付完成后下载完整资料
海港集装箱码头双自动堆垛机性能仿真研究
Amir Hossein Gharehgozli a,lowast;, Floris Gerardus Vernooij b, Nima Zaerpour c
摘要:本文研究了缓存区对双层自动堆垛起重机(ASC)的性能的影响,该堆垛起重机在海边和陆地的转运区域的顶部运行。 缓存区域是一个临时存储位置,以便一台起重机可以开始请求,并将集装箱留在那里以供另一台起重机完成请求。 通过在有和没有这种缓存区域的情况下测试设置,目标是发现导致最佳性能的稳健规则,测量方法如下:(1)完工时间满足所有请求;(2)起重机由于干扰造成的总等待时间或在缓存区域不连续交付容器(阻塞时间)。 测试了决策变量对性能的影响。 决策变量是:(1)起重机处理请求的方式(调度);(2)容器在缓存区域的存储位置;(3)堆栈中缓存区域的位置;(4)缓存区域的大小和容量(5)堆栈中缓存区域的数量。 对于每个决策变量,开发了多种启发式算法。 结果表明,当使用相同的调度启发式时,没有缓存区域的设置几乎在所有测试实例中优于缓存区域的设置。 对于这两种类型的设置,调度启发式选择对最终性能的影响最大。 在这项研究中,我们选择了简单的启发式方法,因为出于安全和简单的原因,集装箱码头运营商为避免协调和安排两个ASC的复杂性而倾向于使用。
1.介绍
由于全球化,近年来船舶的集装箱数量和船舶规模显着增加,预计未来持续增长。 在竞争激烈的市场中,全球参与者不断寻求改善运营并获得成本效益。 他们采取的方式之一是选择性价比最好的集装箱码头或港口。 因此,为了使码头保持竞争力并留住客户,码头需要增加集装箱的周转量,同时保持低价。 作为解决方案,终端旨在提高存储密度,同时提高日常运营的自动化水平。 一个例子是使用自动化堆垛起重机(ASC),这是自动化的轨道式龙门起重机。 这些起重机在容器临时堆放的集装箱堆场(通常称为堆垛)中工作。 堆栈是受吞吐量显着影响的集装箱码头区域之一在集装箱码头增加。 不断开发新技术和方法来有效地处理堆叠操作,以避免堆叠成为终端的瓶颈。
ASC可以看作是集装箱码头自动化的一个步骤,以确保低运营成本,高码头利用率和高可用性。 在使用ASC的终端中,可以找到不同的配置。 基本配置是每个堆栈有一个ASC为陆地和海边提供请求,作为接送点和下车点,也称为转接点或输入/输出(I / O)点。 为了提高吞吐量,每个堆叠中具有两个非通过ASC的配置在实践中是常见的,其中一个ASC服务于陆地而另一个服务于海边。 在这样的配置中,ASC是不通过的,即有两个相同的ASC不能通过彼此(也称为双吊车,参见图。1)。 在本文中,我们将重点放在带双吊车的堆垛上。
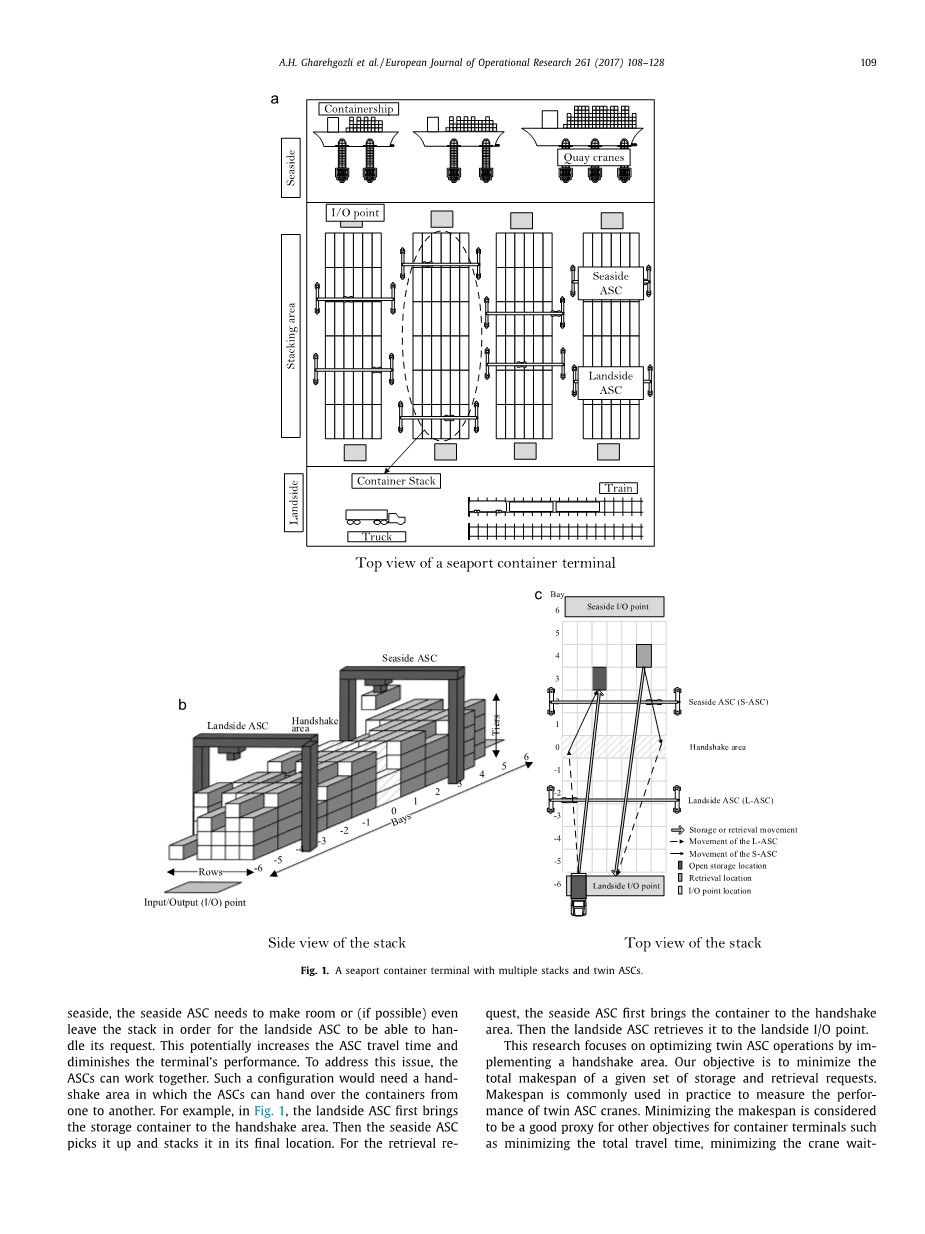
具有双ASC的容器堆栈通常具有I / O点海边和陆边。 在海边,自动引导车辆或码头卡车在陆地上拾取和运送集装箱,这个功能通常由卡车执行。 难点在于,当陆上ASC有一个要求接近的时候在海边,海滨ASC需要腾出空间或(如果可能的话)离开堆栈,以便陆地ASC能够处理其请求。 这可能会增加ASC的行程时间并降低终端的性能。 为了解决这个问题,ASC可以一起工作。 这样的配置需要一个缓存区域,ASC可以将容器从一个移交给另一个。 例如,在图1,陆地ASC首先将存储容器带到缓存区域。 然后海边的ASC把它捡起来放在它的最终位置。 为了达到目标,海边ASC首先将容器带到缓存区域。 然后,滑坡ASC将其检索到滑坡I / O点。
这项研究侧重于通过实施缓存区来优化双ASC操作。 我们的目标是最小化给定的一组存储和检索请求的总完工时间。 在实践中通常使用马克斯潘来衡量双胞胎ASC起重机的性能。 最小化完工时间被认为是集装箱码头其他目标的一个很好的代表,例如最小化总行程时间,最小化起重机等待时间,并且最大限度地减少到期日的延迟。
a
|
|
|
|
c
b
图1.具有多个堆栈和双ASC的海港集装箱码头。
我们研究以下问题:“哪个缓存区域设置导致带有双ASC的集装箱码头的最佳性能?”随着使用带有双ASC的系统的终端数量明显增加以及缺乏学术研究,这个问题与两个从业人员和学者。 为了回答这个问题,我们制定了以下的问题:
- “对于给定的堆栈设置,什么是最好的调度启发式?”
- “对于给定的堆栈设置,什么是最好的缓存区域设计?”
- “对于给定的堆栈设置,缓存区域中最佳的存储位置策略是什么?”
- “调度启发式,存储位置和缓存区域设计的最佳组合是什么?”
为了回答这些问题,我们为每个子问题提出了一些简单的启发式方法,并对每种启发式组合进行了模拟研究。 我们开发简单的启发式方法来回答每个问题。 这得到了实践的启发,尽管更复杂的调度可能为终端带来更多节省时间的机会,但出于安全和简单的原因,集装箱码头运营商更愿意避免协调和调度两台ASC起重机的复杂性。
本文的其余部分安排如下。 在第2节,我们回顾相关文献。 在第3节讨论了系统,概念和方法。 接下来是仿真模型的解释(第4节)。 结果将在以下内容中进行介绍和讨论第5节。 其次是未来研究的结论,局限和领域第6节.
2.文献评论
关于堆垛作业的文献通常可以分为两组:堆垛集装箱和调度堆场起重机。 集装箱堆放着重于正确地解除堆栈中的集装箱,其主要目的是最大限度地减少重复次数。 这已经在三个主要类别中进行了研究(另见最近的文献综述Goerigk等人 (2016B), Lehnfeld和Knust(2014)):(1)预先编组(Cordeaua等,2015;Expoacute;sito-Izquierdo等,2012; Bortfeldt&Forster,2012; Huang&Lin,2012),(2) tainers(Ji等人,2015; Jin等,2015; Ku&Arthanari,2016; 卡塞塔等人,2011; Forster&Bortfeldt,2012)和(3)堆叠方法 (Boysen&Emde,2016; 张等人,2014,2014年; Gharehgozli等,2014b; Yu&Qi,2013)。 几乎在所有论文中,作者都关注在船到来之前重新调整。 同时,避免可能发生在船舶到达延迟时。 Gharehgozli等人将前者命名为“前期调整”并介绍 后者是“后期改造”。它们表明,延迟船舶可以显着增加终端所需的重新调整努力。
码头起重机的调度重点在于获得最佳的计划。一台或多台堆场起重机在码头堆放区堆放和取回集装箱。 许多作者专注于一台起重机的堆垛作业(关于完整的研究列表,我们参考了作者的作品)Gharehgozli等人 ,(2014A, 2016b), 戈尔曼 等人。(2014), Carlo等人(2014),以及Boysen和Stephan(2016)。 另一方面,一些研究考虑了设置 多台起重机共用一个堆垛,与此类似论文(例如参见Dorndorf&Schneider,2010; Gharehgozli 等 2015年; 李等人,2012年,2009年; Park等人,2010; Stahlbock&Voszlig;, 2010; Ng,2005; Saanen&Valkengoed,2005; Choe等,2007;戴尔等人,2009年)。 在大多数论文中,这个问题被表述为一个混合整数模型,并且最小化完工时间是主要目标,(例如参见Gharehgozli等,2015; Vis&Carlo,2010; Briskorn&Angeloudis,2016; Briskorn等,2016)。 此外, 在使用多台起重机的情况下,处理起重机干扰是另一个主要研究重点(Boysen等,2016)。 然而,与码头起重机调度的文献相比(Bierwirth&Meisel,2010; Meisel&Bierwirth,2013; Meisel,2011; 金 &Park,2004; Moccia等,2006; Choo等人,2010; Lim等人, 2004年,2007年; Lee等人,2008; Chen等,2012; 刘 等,2006), 码头起重机的干扰还没有得到很好的研究 为了处理起重机调度的复杂性,仿真是用于研究问题的另一种工具。 例如,Kemme(2012) 开展了一项全面的模拟研究,以比较存储块布局和包括双ASC在内的四个自动化堆场起重机系统对海港集装箱码头性能的影响(另见Petering等人,2009)。 但是,这些起重机的协作,例如通过握手区域,尚未被考虑或不是主要关注点。 尽管研究人员已经开始研究终端操作其他部分的协作(参见例如,Gharehgozli等,2016a).
卡罗和维斯(2009) 是最早的研究发现tions协作起重机缓存区的必要性。 他们表示,对于这样一个系统需要做出两个决定:
(1)请求是由一台还是两台起重机运输,从而利用交换区;(2)请求需要处理的顺序。 除了这项研究外,还缺乏关于文献中合作的研究。 事实上,据我们所知,只有两项研究集中在这种合作的ASCs系统,即Dorndorf和Schneder(2010)和 汽车lo和Martiacute;nez-Acevedo(2015)。 貌似,在一个 更广泛的背景下,也很少有研究讨论一个系统 合作材料处理设备(Carlo&Martiacute;nez-Acevedo,2015)。 一项讨论合作系统的研究表明, 操作升降机是由...完成的卡罗和维斯(2012)。 在他们的文章中,研究了一个带有两个共用桅杆的合作升降机的系统。 这是一个可以与带有双ASC的系统比较的系统,因为它们都有两个共轨单轨的轨道式装载设备。 区别在于升降机在各个位置之间垂直移动,而ASC水平移动。 在本节的其余部分,我们关注这些研究的发现和见解。
研究请求分配问题,哪个电梯将处理哪个请求和哪个命令。 他们的目标是尽量减少升降机处理请求所需的总时间(即完工时间)。 给出了确定电梯干扰情况的方法。 通过比较各种优先权规则,他们提供的证据表明,与吞吐量系统和简单经验法则相比,这种系统的吞吐量平均分别提高了82.49%和60.08%。 研究一个带有两个ASC的系统,在该区块的中间有一个握手区。 他们假定给出每个ASC要服务的请求的顺序。 他们比较了14个优先规则和分支定界方法找到的最优情况。 他们的目标是发现一个使完工时间最小化的规则。 结果表明,优先考虑在干扰时刻剩余时间最长的起重机优于所有其他规则的规则。 最后,多恩多夫和施耐德 在自动化堆栈中研究三重交叉协作ASC系统。 在这里,两台较小的起重机之间发生干扰,或者较大的ASC降低其吊具。 他们研究的主要目标是最大限度地提高起重机系统在高峰负荷下的生产率,同时防止进出口集装箱运输延误。 他们使用波束搜索方法进行请求至ASC分配。 在接下来的步骤中,他们使用分支和绑定的方法确定最佳路线。 结果表明,与通常使用的启发式方法相比,他们的方法可使生产力提高20%以上。
从文献中可以得出两个结论:(1)研究缺乏研究一个系统与协作双ASC系统,(2)和那些谁研究过这样的系统使用固定调度启发式,并假定只有一个缓存区与固定的大小和位置。 通过研究缓存区域的影响并尝试确定缓存区域的最佳设计,我们旨在弥合文献中的差距。 我们使用仿真进行了我们的研究,被证明是处理复杂环境(如集装箱终端)的强大工具。Angeloudis和Bell(2011) 回顾集装箱码头模拟模型,并解释说:“设施的庞大规模和所用设备的复杂性使得难以分析预测码头在特定布局和配置下的运行情况。”Dragovic#39;等人 回顾了自1961年以来所有关于港口运营的模拟研究,并得出结论:“过去50年来,模拟模型的使用越来越受到人们的青睐,并且在港口发展和更具体的集装箱码头发展方面发挥了重要作用。”
3.问题描述和方法
在本节中,我们首先描述正在研究的系统第3.1节,随后讨论了调度启发式,优先级规则,缓存区域设计和存储策略第3.2节.
3.1系统描述
图1(c)显示了具有两个协同ASC的研究系统的俯视图。 L-ASC负责处理进出滑道的检索和存储请求,S-ASC负责处理往返海边的请求。 为了避免事故发生,起重机需要保持至少1个海湾的最小安全距离,这是起重机可以在彼此旁边工作的最近距离。 在堆栈的中心图1(c),有一个1湾宽的缓存区。 握手区域是一个临时存储位置,因此一台起重机可以发起请求并将其交给另一台起重机完成。 在这种情况下,需要确定哪些请求被拆分。 在这项研究中,他们的容器跨越握手区域的请求被视为分割请求。 这些容器由两台起重机处理。
3.11起重机之间的干扰
采用双ASC的环境的一个关键方面是相互干扰的情景。 因此,我们需要在任何给定的时间跟踪每个ASC的位置。 我们遵循相同的原理图 ASC业务代表Carlo和Martiacute;nez-Acevedo(2015年)发现ASC干扰的情景。 在这个rep- 每个存储或检索请求包括四个动作:
-
-
-
- 起重机行驶(空)至所需集装箱的提货位置(I / O点或取回位置)。
- 起重机降低吊具,拿起集装箱并再次吊起吊具。
-
起重机随着集装箱移动到所需位置(I / O点或堆垛中的存储位置)。<!--
全文共45661字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[12931],资料为PDF文档或Word文档,PDF文档可免费转换为Word
-
-
您可能感兴趣的文章
- 2.3港口吞吐量预测外文翻译资料
- 使用多标准移动通信分层遗传算法的阻抗 匹配网络的宽带优化外文翻译资料
- 移动RFID标签阅读与非重叠串联阅读器在输送带的应用外文翻译资料
- 利用数字图像进行的全场应变测量方法外文翻译资料
- 自然灾害中并发事件的多种应急资源的分配外文翻译资料
- 基于主机的卡仿真:开发,安全和生态系统影响分析外文翻译资料
- 实现基于Android智能手机的主机卡仿真模式作为替代ISO 14443A标准的Arduino NFC模块外文翻译资料
- 探索出行方式选择和出行链模式复杂性之间的关系外文翻译资料
- 信息系统研究、教育和实践的基本立场及其影响外文翻译资料
- 仓储和MH系统决策模型的设计优化与管理外文翻译资料

