
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
使用分布质量载荷动力学控制桥式起重机
Jie Huang, Xumiao Xie, and Zan Liang
摘要:运动诱导振荡的起重机载荷严重降低起重机的有效性和安全性。对于运输一个大型的物体,负载的模型就是分部质量载荷的模型,通常通过四个操纵电缆附加到吊钩上。操作的任务会因为有效载荷向主动机械运动方向摆动和有效载荷对操纵电缆扭曲而变得更有挑战性。运输分部质量有效载荷的桥式起重机的动力学公式推导。一种控制方式被设计出来用以制止有效载荷的摆动和扭曲。模拟一个大范围的运动和各种系统参数用来分析动态行为和控制方案的鲁棒性。从桥式起重机输送分布式质量板条箱获得的实验结果验证了模拟的动态行为和控制方案的有效性。
关键词:桥式起重机分布式质量载荷,动态扭转,变量控制。
1 前言
起重机提供必要的物料搬运工作遍及全球,然而本身的物理结构的可活动性降低了它的有效性,安全性以及定位精度。由于人们操作导致运动导致的的有效载荷振荡是主要限制因素。因此,起重机必须装备放振动系统来确保安全有效的操作。[1]
大量研究已经用以提供解决由起重机载荷振荡引起的挑战性难题。解决方案大概能分成两种类别,反馈控制以及开环控制。反馈控制策略利用测量以及估计系统状态来抑制振动。[2]-[5].开环控制技术通过筛选输入来创造一个规定的运动以导致最小的振动[6]-[9],虽然大多数研究主要集中于解决单摆型起重机,很少研究着力于减少双杆摆型起重机的剩余载荷[1]。[10]-[16]但是一些早期的文章已经研究减少过渡震荡。此外,因为有效负载的量和尺寸很大程度上影响的第二种模型的有效载荷的振动的频率,这些方法通常不能够提供对鲁棒性大的第二模频率变化的解释由于大范围的负载的量和尺寸[17].
对于默写类型的材料运输,大型物体的模型是分布型质量载荷是通过四个操作电缆悬挂在吊钩的上。应用的模型可以在船坞仓库中见到,其中起升装置用以一栋大型的有效载荷。这种分布式质量静载动力学比典型的在单摆型起重机上发现的更加复杂。操作运输分布性质量有效载荷会因为有效载荷的向机械主动运动方向震动和有效负载想操作电缆扭转而变得更加困难。因此,控制有效载荷的震荡同样会因为其他因素变得复杂,或许最明显的复杂化是有效载荷的扭转被抑制。尽管,很少而研究着力于控制工业起重机有效载荷的扭转,因此这个研究对于桥式起重机的动力学和控制一个确切的装置来运输分布式重力有效载荷是非常必要的。
剩下的文章按如下组织,桥式起重机运输分布式质量有效载荷的实际配置的动力学问题在第二部分介绍,抑制复杂分布式质量有效载荷震荡的推导的控制方法在第三部分介绍。大量的模拟实验用以表现验证提出的方法的有效性和鲁棒性。最后,关于桥式起重机运输分布式质量的样本箱的实验用以验证系统的动力学和方法的有效性在第四部分展示。
2对桥式起重机运输分布式质量载荷建模
图片1表示的是桥式起重机运输分布式质量载荷的示意图。桥式起重机只在跑道的X方向上运动,同时小车只在在桥的Y方向上滑动,一个没有质量的悬索长度为LS 挂在小车下面同时支撑质量为MH的吊钩。一个统一分布质量载荷质量为MP,长度为Ll宽度Lw,高度为Lh,通过四个不计质量长度为Lr的操纵绳索附在吊钩上。
该模型的输入是桥的加速度ax和小车的加速度ay,输出是悬挂电缆的摆动角度theta;x和theta;y以及有效载荷相对悬挂电缆摆动角度beta;x和beta;y有效载荷扭转角度 gamma;。这都是假设小车显著比吊钩和有效载荷重,模型同样假设悬线和索具电缆是不计重量同时是刚性的。吊钩建模看做是一个点载荷,这个模型的运动方程使用动力学软件得出,如果悬线和操纵电缆不能再运动过程中改变,非线性的运动方程就会在附录重给出http://ieeexplore.ieee.org
记载了这个系统中没有在本文中记载的运动方程的由来。用以驱动模型中的命令是是一个梯形速度曲线,这条曲线在人操作按动按钮来开动起重机的时候上升。这个结果是速度在达到最大值前上升。之后起重机在操作者松开按钮时运动到它的最大速度。松开按钮导致起重机的速度减少到零。
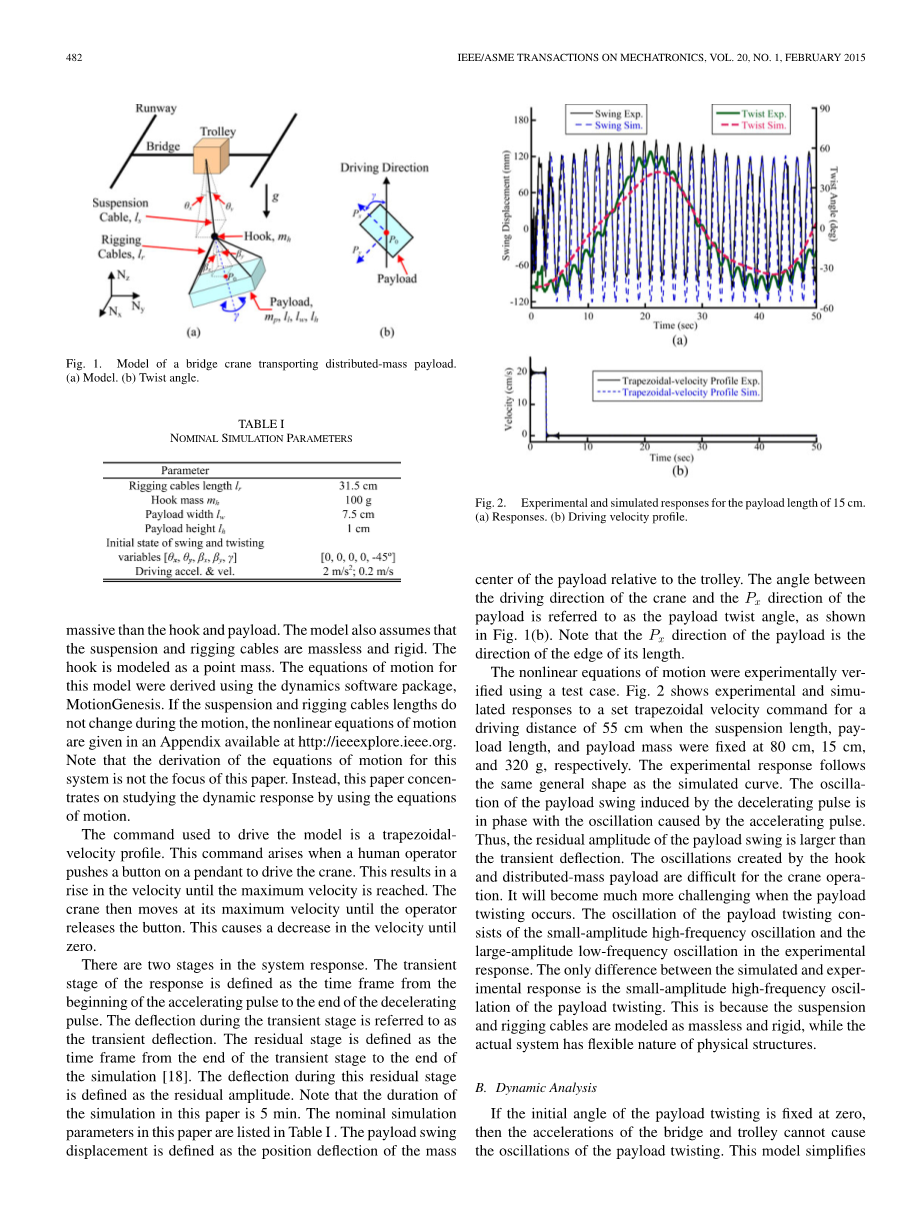
在这个系统响应中有两个阶段,响应的瞬时状态被定义为从开始加速的脉冲到结束减速的脉冲的这段时间,在过渡阶段的偏转被称为瞬态偏转,剩余阶段被定义从瞬态结束到模拟结束的时间帧[18]。在剩余状态的偏转被定义为残余振幅,记录这个模拟的时间段在本文中为五分钟,本文中标准的的模拟参数列在表1.有效载荷偏转的替换被定义为有效载荷相对小车重心位置的偏转,起重机运行方向与有效载荷Px方向的夹角被参照为扭转角度,在图片1b中所示,Px方向的有效载荷是它长度边缘的方向。
非线性运动方程通过样本测试箱通过实验验证。图片2示意的是实验的模拟的对梯形速度命令对一个运行距离55厘米的响应,当悬线长度80厘米有效载荷长度15厘米有效载荷质量320克,实验的结果与一般模拟曲线相同,由于减速脉冲导致的有效载荷摆动的震荡与由加速引起震荡同相。因此,有效载荷摆动的残余振幅比瞬时状态偏转的大,由于吊钩和分布质量载荷产生的震荡使得起重机操作困难,当有效载荷产生扭转时更加有挑战性,实验响应中有效载荷扭转的振荡由小振幅高频率的振荡和大振幅低频率的振荡组成,实验与模拟唯一不同的是有效载荷扭转产生的小振幅高频率的振荡,这是因为悬线和操纵电缆建模中式不计质量且为刚性的,实际系统中却有可活动的物理结构。
B,动力学分析
如果最初有效载荷扭转的角度定为0度,那么由桥和小车加速就无法造成有效载荷扭转的振荡,这个模型简化了动力学有关有效载荷摆分析同时提供简单的有效摆动频率的估计,这个估计可以用于设计桥式起重机分布式质量载荷控制系统,因此,线性的运动方程与摆动角度theta;x和beta;x,桥的加速度为
G是重力常数,R是重力有效载荷到吊钩重心的半径,Lp是有效载荷关于Ny轴的回转半径,此外由于小车加速引起的线性方程与桥加速引起的相似,有效载荷摆动的线性频率简化为1 2
第一个和第二个模型频率(4)取决于悬线的长度,刚性绳的长度质量半径和有效载荷的尺寸,图片三表示了第一种模型和第二种模型关于有效载荷摆动的频率与质量半径悬线长度的关系(此时有效载荷的长度定为15厘米)对于双摆型起重机第一种模型的震荡的频率会随着悬线电缆的增长而减小,同时质量半径对第一型频率的影响很小,但是在第二型中很小的质量半径的改变会导致很大的振荡频率的改变,反而悬线电缆长度的对第二型频率的影响很小。这表明第二种模型频率变化比第一种模型变化幅度大,因此,振荡控制系统,应该提供更大的鲁棒性在第二种模型频率中,
有效载荷扭转的频率变化同样可以分析,有效载荷扭转的动态变化很复杂,是因为有效载荷扭转频率摆动角度对有效载荷扭转的频率有很大影响,增大有效载荷摆动角度会增大有效载荷扭转震荡的频率,有趣的是有效载荷的尺寸对有效载荷扭转的频率也有影响,有效载荷扭转频率在当有效载荷的长度与宽度相等时不受影响,当增大有效载荷的长度与宽度的比值时有效载荷扭转的频率增大
3 命令缓冲抑制振荡
A设计柔化
缓冲指令方案用于抑制桥式起重机上受到分布式质量载荷引起的振荡,缓冲指令是一种急剧抑制运动导致振荡的控制方法,通过智能的原始之灵,考虑到非线性的动力学振荡,一个强大的缓冲器被使用,转换功能缓冲函数如下
当Wm等于模型的自然频率,M是
模型的阻尼比,Tm是模型的阻尼振荡周期,当模型的频率和阻尼振荡周期是正确的,任何命令造成的变化会被限制到0.缓冲韩式是低通与多陷波滤波器的组合,缓冲器的鲁棒性由实际低于可以容忍等级的估计错误频率范围19%相对于初始,使用预估(4)第一种模型的频率和设计的缓冲函数的频率,缓冲器对桥式起重机运输分布式质量载荷设计,记载在这种情况周阻尼比被假设为0
低通和陷波滤波器的功能可以预计在第一种和第二种模型的有效载荷扭转引起的振荡,这是因为陷波滤波影响降低第一种模型的有效载荷摆动引起的振荡,低通滤波器用于抑制第二种有效载荷摆动引起的振荡,此外低通滤波器影响缓冲函数具有更大的鲁棒性在第二种模型中改变频率,在第二部分的动力学分析表现
有效载荷扭转引起频率增大随着有效载荷摆动的角度,因此抑制有效载荷摆动的振荡可以减少有效载荷扭转振荡此外,有效负载的瞬态振荡摆动还对有效载荷扭转一定的影响,一种由有效载荷摆动瞬时振荡引起的惯性力可以导致有效载荷在很低的速度下旋转,因此有效载荷摆动引起的瞬时与残余振荡都应该减少以一直有效载荷的扭转。平滑器产生平滑的速度轮廓移动起重机,平滑器瞬时在边界条件减少有效载荷摆动瞬时振荡。因此,平滑器同样对有效载荷扭转减少变化有益。
B缓冲器的稳定性验证
在很多情况中有效载荷的尺寸或者质量可能不知道悬线电缆的的长度时常改变,所以缓冲器对悬线电缆长度有效载荷的质量和有效载荷尺寸变化的敏感性就非常的重要,图片4表现了由悬线电缆长度变化引起的有效载荷摆动的瞬时振幅和残余振幅。有效载荷的长度和质量定为15厘米和320克,小车驱动距离50厘米。不加缓冲器,瞬时的振幅随着悬线的增长而变大。当悬线长度为50厘米时残余振幅有一个局部最大值,这个局部最大值达到是因为由于加速或者减速造成的开始和结束振荡,当模型的悬线长度为80厘米,缓冲器减少瞬时百分之82.2的振幅同时抑制残余振幅达到百分之98.9
图表5表现了不同悬线电缆长度由于有效载荷扭转造成的有效载荷瞬时振幅和残余振幅,不加缓冲器,瞬时振幅随着悬线长度增加而减少。残余振幅的峰值发生在在图表4中表示的参与有效载荷的摆动接近它的最小值振幅,这个现象可以在物理上解释为在由于加速和引起的振荡的作用。当减速脉冲抵消了由于加速脉冲引起的振荡,只有效载荷摆动旋转有效载荷造成的瞬时振荡引起的惯性力,因此,这会导致有效载荷扭转的残余振幅的强烈增大。当模型悬线长度我80厘米,缓冲器减少瞬时振幅平均百分之98.7,抑制残余振幅平均89.7,。被缓冲过的由于有效载荷扭转产生的残余振幅随着悬线长度从40到60厘米增加而减少,这是因为有效载荷扭转是根据有效载荷的摆动和模拟的持续时间。
图表6展示了有效载荷摆动产生瞬时振幅和残余振幅由于有效载荷长度的关系。记录到有效载荷的质量随着有效载荷的长度增大而增大,小车被驱动的距离为50厘米,悬线长度被设置为80厘米,不使用缓冲器,有效载荷长度和质量的变化对瞬时和残余振幅没有很大的影响,当模型的有效载荷的长度和质量被设置为15厘米和320克,缓冲器减少瞬时振幅欧英俊百分之84,1消除残余振幅平均百分之99.9.
图表7表现了有效载荷扭转的瞬时振幅和残余振幅对各种有效载荷长度的关系当有效载荷质量随着有效载荷的长度增加而增加。不加缓冲器,瞬时振幅和残余振幅当有效载荷的长度定为7.5厘米不被限制。这是因为有效载荷的长度和宽度相等。超过这一点有效载荷尺寸的改变对残余振幅的影响不大。同时,瞬时振幅随着有效载荷的长度增加而增加直到17厘米,超过这一点有下载喝的长度对瞬时振幅的影响很小。当模型的有效载荷长度和质量设定为15厘米和320克,缓冲器减少瞬时振幅平均为百分之98.2消除残余振幅平均为百分之97.2.
图表4-7展示了缓冲器可以稳定的减少由于操作造成的振荡。
4.实验结果
实验操作使用小型桥式起重机来运输分布式质量载荷箱在图表8中。起重机使用松下交流伺服电机驱动。控制硬件由个人电脑组成一个数字信号基于处理器的运动控制卡连接到个人电脑的一个伺服放大器。初始命令(梯形速度文件)通过MATLAB的一个脚本发送它适用于在命令缓冲器算法,生成 该驱动器的缓冲命令。平台的高度大约为150厘米,小车的行程为60厘米,一个样本箱被用作是分布式质量载荷,使用四个刚性绳附在吊钩上,有效载荷的尺寸为150毫米X75毫米X10毫米,有效载荷的质量为320克。悬线和刚性电缆由迪尼玛超强编织渔线制造。在模拟中摩擦假设成零。摩擦通过一系列房间少,包括减少吊钩和绳子的连接区域,一个CMOS相机被安装在小车上用以记录样本箱自伤两个红色标记的位移。有效载荷摆动的位移和有效载荷扭转角度通过计算两个红色标记来记录。
图表9展示了实验不加缓冲指令和加了缓冲指令下有效载荷摆动位移和有效载荷扭转两种的结果。小车被驱动了50厘米,复杂的分布式有效载荷动力学行为很清晰的可以在未加缓冲器的结果中看出。缓冲器抑制了整个由于有效载荷摆动位移引起的振荡平均百分之93.4,同时消除有效载荷扭转角度平均为百分之97.8.很明显可以发现瞬时和残余振幅被缓冲器减少了,因此缓冲器是有效的。
为了验证缓冲器的动力学和有效性在不同系统参数以及操作条件中都可以抑制振荡
一系列的实验设计了出来,正如图表4-7所示意,不同悬线的长度被用以验证在大范围内动力学的可能性。
图表10表现了有效载荷摆动和扭转残余振幅在有与没有缓冲器的情况下在不同悬线长度下的运动。注意模型中悬线长度设定为80厘米,和图表4,5模拟的结果相似,在未经过缓冲的残余振幅的峰值产生在悬线的长度在40到60厘米变动中。有效载荷扭转不通过缓冲的残余振幅大约90度对于大多数悬线的长度除了120厘米。实验的结果比模拟值的结果好在悬线长度为120厘米时因为模型没有阻尼,而实际的系统有销量的阻尼,阻尼阻止通过当减速脉冲抵消加速脉冲造成的振荡有效载荷旋转的惯性力。实验结果表明缓冲器抑制有效载荷摆动引起的残余振幅平均百分之95.2,抑制有效载荷扭转平均百分之84.9
这些实验验证了缓冲器可以有效地消除在不同系统参数中的有效载荷振荡,正如模拟预测的结果一样
5 结论
文章展示了理论和实验的分析动力学影响桥式起重机运输分布式质量载荷,缓
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148702],资料为PDF文档或Word文档,PDF文档可免费转换为Word

