
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
基于灰度约束光流算法的车速测量
摘要
基于视频图像的车辆速度测量(VSM)代表在智能交通系统(ITS)中速度测量的发展方向。本文提出一种新颖的车辆速度测量方法,其中包含改进的三帧差分算法和提出的灰度约束光流算法。通过改进的三帧差分算法,运动车辆的轮廓可以被准确地检测出来。通过提出灰度约束光流算法,车辆轮廓的光流值,即图像中的车辆速度(像素/秒)可以被准确的计算。然后,通过车辆轮廓的光流值和相应的道路图像像素的宽度之比计算车辆速度(公里/小时)。该方法可以通过减少改变照明和阴影的影响产生更好的光流场。除此之外,它可以明显减少计算,因为它只计算运动目标轮廓的光流值。实验对比该方法和其他车辆速度测量方法表明,该方法有一个令人满意的车辆速度估算结果。
1.简介
车辆速度测量在交通信息采集中扮演一个重要的角色,也是一个热门而困难的问题在智能交通系统(ITS)中。目前,车辆速度测量方法被分为两种类型:(1)基于硬件的方法(2)基于软件的方法。基于硬件的方法包括感应线圈速度测量、激光速度测量、雷达速度测量等。基于软件的方法是通过视频图像的车速测量。
一个感应线圈速度测量方法是一个嵌入到地面的回路探测器。当车辆穿过线圈, 线圈的磁场变化,探测器就可以计算出车辆的速度。由于感应线圈必须直接嵌入在车道里,它很容易在安装或维护的时候破坏道路。并且线圈也受冻结、地基沉降和其他因素影响。而且,当交通放缓的时候测量精度将大大减少。至于激光速度测量,一个激光探测器被放在道路上方,它会多次检测移动物体的距离和时间,然后使用它们来计算物体的移动速度,这是基于光波的速度测量。激光探测器可以在不同天气条件下日夜工作,但极端温度可能在他们的功能上带来性能损失。雷达速度测量采用多普勒雷达效应。当发射源或接收器相对运动时,接收到的信号频率将会改变。雷达速度测量对安装角度有较高的要求,它的安装角度在应用中有一定限制。
为了获得车辆速度测量的视频图像,相机被安装在道路的顶部或者沿着一个道路放置拍摄移动车辆。相机捕捉到的图像经过用于计算车速的图像处理和模式识别算法分析。通过视频图像的车辆速度测量的常用方法是角检测、纹理分析、视频跟踪等。这些方法可以在两个连续图像帧中很好的找到匹配的车辆的位置,但大数据的计算不能满足实时的速度要求测量。虚拟线圈的方法可以代替真正的线圈,但是很有可能因为图像帧采集周期造成车速误判。此外,在两个连续的图像中匹配汽车的不同部分会因为在连续图像中车身大小的变化影响车辆的实际移动距离
为了克服以上各种方法的缺点,本文提出一种基于改进的三帧差分算法和灰度约束光流算法的新颖的车辆速度测量方法。通过改进的方法,车辆的轮廓可以被准确地检测出来。通过提出灰度约束光流算法可以准确计算运动车辆轮廓的光流值。这个光流值是图像中的车辆速度(像素/秒)。该方法通过只计算移动目标轮廓的光流值来减少计算量。在图像中,我们画出感兴趣的区域(ROI),然后计算其中的车辆速度。通过像素和道路宽度的相应关系,光流值可以换算成移动物体的速度(公里/小时)。
本文的其余部分安排如下。在第二节,描述本文的下车辆速度测量方法,介绍
改进的三帧差分法和灰度约束光流法。第三节展示我们方法的实验结果和结果分析。最后,在第四节提出实验结果的相关结论。
2.车速测量方法
本文中使用的传感器是安装在车道顶部的一个摄像机。根据摄像机,车辆的信息可以获得。通过改进三帧差分算法和提出的灰度约束光流算法,车辆的运动参数可以获得。然后,通过这种方法可以计算汽车的速度。
2.1改进的三帧差分法
2.11 帧间差分法
帧间差分法是广泛用于低计算复杂度的移动目标的检测。在大多数情况下,性能很好。当目标移动快,两帧图像间生成的目标轮廓产生重叠。所以,提出了三帧差分差分法。
三帧差分法的原理如下(1)-(3):
在(1)和(2),Fmminus;1(x,y)、Fm(x,y)和Fm 1(x,y)表示mminus;1帧图像的灰度值,第m帧图像和第m 1帧图像在空间像素点(x,y)。T是阈值。p(x,y)是目标图像空间像素点(x,y)的灰度值。
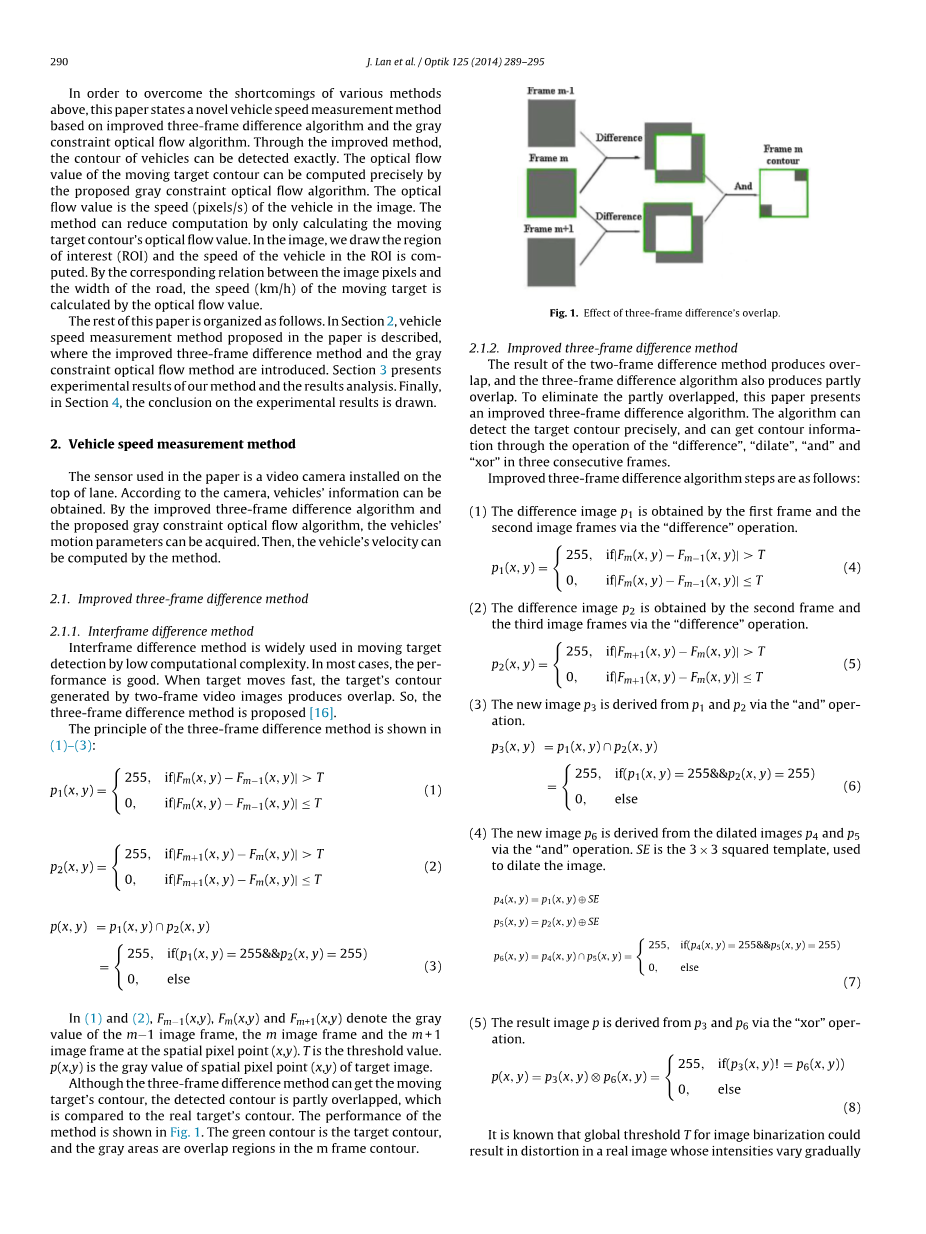
虽然三帧差分法可以发现移动目标的轮廓,被检测的轮廓和真实的目标轮廓相比是部分重叠的。该方法的性能如图1所示。绿色的线是目标轮廓,灰色区域是在m帧轮廓重叠的地区。
图1 三帧差分重叠的效果
2.12 改进的三帧差分法
双帧差分法的结果产生重叠,三帧差分算法也会产生一定程度上的重叠。为了消除部分重叠,本文介绍了一种改进的三帧差分算法。该算法可以精确的检测目标轮廓,可以在三个连续帧中通过差分,“膨胀”,“与”和“异或”操作得到轮廓信息。
改进的三帧差分算法步骤如下:
(1)差分图像P1是通过第一帧图像和第二帧图像差分运算得到。
(2) 差分图像P2是通过第二帧图像和第三帧图像差分运算得到。
(3) 新的图像P3是通过P1和P2“与”操作得到。
(4) 新的图像P6是图像P4和P5膨胀后“与”操作得到。SE是3times;3的平方模板,用来腐蚀图像。
(5)结果图像P是P3和P6通过“异或”操作得到。
图2 改进的三帧差分效果
众所周知,二值化图像的全局阈值T可以导致因为照明强度逐渐变化实际图像失真。因此,我们采用局部自适应阈值分割方法去从背景提取目标。全局自适应阈值T是用来做初始划分割。整个图像的阈值T值由整个图像的平均值和标准偏差之间的差异来确定。
阈值T=平均值-标准偏差。
改进的三帧差分算法效果如图2所示。从图中,精确的目标轮廓可以通过这种方法获得。因此,这种算法比三帧差分算法有更好的结果。特别当移动目标的速度更快时,效果更明显。
为了说明改进的方法的性能优越,实验对比三种帧差分方法。图3显示了原始图像,他们是640times;480像素。从图像中计算的阈值T是102。图4(a)展示了双帧差分方法的性能,图4(b)显示三帧差分法的性能和图4(c)显示了本文中提出的方法的性能。
从图4中,很容易作出结论如下:双阵差分法产生明显的重叠。三帧差分法在车轮廓的角上产生重叠。通过使用本文算法获得的轮廓是精确的,如图4所示(c)。另外,白色边缘点的数量分别在图4(a)是4530, 在图4(b)是2573,在图4(c)是2061。因此,改进的三帧差分法有良好的性能。
对于多目标运动检测,该算法可以作为最初的分区,然后使用灰度约束光流法计算出移动目标的速度。
2.2 光流的基本方程和改进算法
光流场表达的灰度值的变化可以被用来观察图像中运动目标的信息。它包含目标图像点的瞬时速度矢量信息。根据速度矢量,目标速度可以计算出。
2.21光流的基本方程
光流是吉布森首先提出的,它是灰度模式下目标的移动速度。移动目标的光流场的计算是基于两个假设:(1)一个移动对象的灰度值在很短的时间内是不变的;(2) 由于目标的硬属性,目标的每个像素有相同的速度。
假设图像中的点P坐标(x,y) 在后dt时间后移动至点(x dx,y dy)。灰度值在(x,y)是I(x,y,t),在(x dx,y dy) 是I(x dx,y dy,t dt)。由于dt是短暂的,基于这个假设灰度值是不变的,如(9)所示。同样,(9)被称作基本光学流动方程。
(9)的左边使用泰勒公式展开,并显示如下。
简化和省略二次项后,基本的光流方程(9)简化成(11)。
u = dx / dt和v = dy / dt是在水平和垂直方向的图像空间像素点(x,y)
的移动速度。
图3原始图像:(a)第529帧,(b)第530帧,(c)第531帧
图4差分方法的效果:(a)双帧差分法图像(b)三帧差分法图像(c)改进的三帧差分图像
同时,(u,v)被叫做光学流场。基本的光流可以表示为方程(11)可以被表达成(12)[18、19]
这里Ix = part;I/part;x, Iy = part;I/part;y, It = part;I/part;t.
2.2.2.灰度约束光流算法
在实际应用中, 由于块、多元素、透明度等等原因在很短的时间内光流场中灰度值是不变的假设不适用。根据广义动态图像模式(GDIM),灰度值不是常数,但是改变了。因此,光学的基本方程流(9)和(11)不满足,我们提出灰度约束光流方程,它可以表示如下:
这里I(r)=(x,y,t), 是偏差系数。C(r)是干扰。
灰色的约束光流方程如下所示:
如果满足基本光流方程灰度值不变的假设,就和 (9)是一样的。实际应用,灰度约束光流方程(13)适合于实际情况。同时,灰度约束光流误差如下所示:
变形后,(15)表示如下:
这里
在(16), 是几何组件(移动对象的速度), 是照明组件,比率可以用作和之间的相对强弱的参数。如果比例很大,速度分量的估计是相当准确的。相反,估计速度是不准确的,光的影响很大。比率是重要的估计运动参数和结构参数。因此,Y的值可以用来限制光流场的分布,可以使光流算法在各种具有挑战性的光源,交通条件等等下表现良好。
因为LK(Lucas-Kanade)方法可能在密集流场不能发挥好性能,HS(Horn和Schunck)方法可以检测到轻微的运动的对象,并提供100%的流场。因此,在我们的研究中我们关注的是针对光流场计算的HS方法[19]。
2.2.3 Horn和Schunck移动约束方程
为了满足相同的移动物体造成的光流场应平滑的假设,Horn和Schunck提出由于积分速度分量平滑约束条件。平滑约束误差是由(17)表示。它达到了(17)尽可能小平滑的目的[17,19]。
另一方面,假设在光流场灰度值不变无法满足有很多原因。所以,它要求提出的灰度约束光流误差(15)尽可能小,并表示为(18)。
参数决定了两种误差之间的权重(偏离平滑的误差Es和光流误差Ec)。当图像灰度值的测量准确, 可以更大, Ec也随之变大。反之,如果图像含有大量噪声, 是一个理想的(小于1)的值。
相应的欧拉方程(19)表示如下:
其中是拉普拉斯算符和n表示迭代的次数。
假设表示的平均光流值u,v,可以从本地的图像平滑模板派生。模板的大小取决于图像的要求。只考虑计算,模板大小是3times;3的结果(20)可以写成如下:
因此,一个自然的光流迭代解决方法可以由(21)获得:
其中n表示迭代的次数,u0和v0表示最初的光流值零。当两次迭代之间的距离结果小于阈值,迭代终止。光流值是(u(n 1),v(n 1)。根据u(n 1)和v(n 1)的值,像素P的速度表示如(23),以及像素P的方向表示如(24):
为了显示提出的灰度约束光流算法的效果,通过视频图像测试。灰度约束光流算法和基本的光流算法进行了比较。在测试中,运动目标的轮廓通过改进的三帧差分法获得。这一比率Y设置为1,参数是1。图像如图5(b)和(c)。在图中,当光流值fp大于阈值时,光流场显示如下。
数据表明,灰度约束算法在光流场中有较好的效果,并且在各种具有挑战性的照明和阴影下也有较好效果。所以,改进算法可以比基本的光流算法更好。
图5 (a)原始图像 (b)改进的三帧差分和基本的光流算法效果 (c)改进的三帧差分和提出的约束光流算法效果
2.3 车速测量
在车辆速度测量系统中,摄像机是使用的主要视觉装置。根据摄像机是否需要手动校准,基于视觉的VSM系统可以被分为两个主要模型:(1)校准相机模型[20,21](系统)和(2)未校准相机模型[22-25]。
在校准相机模型中,适当的车辆位置由焦距这个几何参数估计,安装角和安装高度。图6显示了安装示意图[1]。
本文认为相机倾斜和横跨马路的桥上固定位置的问题。图像中,并不是所有图像都是感兴趣的区域。调整焦距,安装相机的角和高度,我们在图像中划定一个感兴趣的区域(ROI)。如图7所示,由绿线化的封闭区域是检测区域。在垂直方向,两个白线之间的交点行和图像边缘是ROI的中心点,该区域可以包含整个汽车轮廓。
图6 安装示意图
图7 感兴趣的区域
图像中的像素和道路的宽度表示为下图:
在ROI,所有移动目标的检测都是由改进的三帧差分法标记, 在每一块计算所有的速度点,移动目标的速度是目标内所有点的平均速度计算得到。目标的速度显示为(26)。
lt;
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[151648],资料为PDF文档或Word文档,PDF文档可免费转换为Word

