英语原文共 8 页
用RCS时间序列分类相同形状空间目标的卷积神经网络
摘要:弹头和诱饵分类是弹道导弹防御中最重要,最难的技术问题之一。传统方法从测量数据中提取特征并采用一些分类算法。但是,很难提取原始数据中嵌入的所有信息,并且可能存在降低分类能力的矛盾特征。提出了一种名为RCSnet的一维卷积神经网络结构,用于对中段相同形状的弹头和诱饵目标进行分类,直接利用雷达截面(RCS)时间序列。将其与在仿真数据集上使用26个选定特征的5种常规分类算法进行了比较,并且在分类性能和预测速度方面均优于它们。为了更好地利用RCSnet,探索了具有不同滤波器编号的RCSnet结构的不同训练算法和网络。
1介绍
弹头和诱饵分类是弹道导弹防御(BMD)中最重要和最困难的技术问题之一。弹道导弹(BM)的飞行可分为三个阶段:助推,中途和再入阶段。助推器关闭后,中段开始。弹头与弹头分离火箭和释放诱饵。自中段以来的持续时间可能是整个飞行的大约80-90%[1,2],这是BMD系统识别和拦截弹头的重要阶段。然而,将弹头与诱饵区别开来是一个巨大的挑战,因为它们的宏观运动几乎相同[3]。在中途,弹头旋转以控制态度。由于不可避免的翻滚,弹头的微动变得旋转并且以小的章动角度进动。根据王[4]的研究,在初始翻滚之后,轴对称诱饵的微动是旋转和进动,就像弹头一样,但具有相对较大的章动角。本文重点介绍最具挑战性的工作,识别相同形状的弹头和诱饵,其中唯一的区别在于微动。
雷达自动目标识别(RATR)中有大量的方法。根据信息来源,它们可以分为基于[5]运动信息的方法,雷达截面(RCS)时间序列,微多普勒信息[6],高分辨率距离剖面(HRRP)[7,8],HRRP时间序列[9]和合成孔径雷达(SAR)[10]或逆SAR(ISAR)[11]的图像。由于中段的导弹和诱饵的宏观运动几乎相同,因此基于运动信息的方法不适用。由于弹头和诱饵的形状相同,因此也不能使用HRRP和基于图像的方法。RCS时间序列,微多普勒信息和HRRP时间序列包含目标的微观运动信息,这意味着它们可能用于解决任务。然而,基于微多普勒的方法和基于HRRP时间序列的方法对雷达提出了相对较高的要求,并占用了大量的雷达资源。前者需要高脉冲重复频率(PRF),后者需要宽带信号,同时RCS时间序列是雷达可以获得的最常见数据。因此,本文使用RCS时间序列作为信息源。
在过去的几十年中,已经提出从RCSR的RCS测量中提取许多特征。统计特征是最广泛使用的,因为它易于计算并且它反映了目标的一些特征。XuXiaojianXu和PeikangHuang[12]提取了RCS时间序列的平均值,方差和其他特征用于目标分类。薛学辉等[13]提取了14个统计特征,并使用贪婪算法来分析最佳特征组合。但是,统计特征不能反映RCS随时间变化的特征。必须有其他功能来填补空白。提出了RCS时间序列的转换特征。有几种类型的变换特征,例如Mellin特征[14],小波特征[15,16],傅里叶特征[17]等等。虽然统计特征和变换特征没有明显的物理意义,但提出了与目标微动周期和目标静态RCS特征密切相关的RCS时间序列和角度分集RCS特征的周期。有许多估计RCS时间序列周期的方法,如s谱方法[18],平均幅度差函数,循环平均幅度差函数,自相关,圆自相关[19],三角函数拟合[20]等等。。然而,由于噪声,目标的多模态RCS与角度曲线以及许多其他因素,仍然难以提取正确的周期。此外,观察持续时间需要至少是目标的微动作时段的两倍。Lee的研究小组使用线性判别算法(LDA)[21],独立分量分析和主成分分析[22],核主成分分析[23],最大散度差[24]和核散度差判别分析[25]船舶分类的角度多样性RCS研究。这些方法的先决条件是获得角度分集RCS,其需要对应于每个RCS测量的目标的精确姿态估计。对于舰船目标来说可能很简单,但由于其复杂的微动作,它对于弹头和诱饵来说更加困难。
对于RATR的上述特征也使用了许多分类方法。模糊方法[12,26]是一种利用这些特征的简便方法。ChunhuaWang和ShiyuanZhang[27]提出了一种二叉树支持向量机(SVM)分类方法,可以产生模糊识别结果的进一步的信息融合。一般来说,利用特征的每种分类方法都可以用于此任务,如LDA,K最近邻(KNN),分类树等。上述所有方法都取决于从原始数据中提取的特征。然而,这些特征具有上述自然的缺陷。更重要的是可能存在信息丢失。无法保证提取的功能已充分利用原始数据。
近十年来,深度学习发展迅速,具有自动特征提取和强大的分类和回归能力。它已成功应用于许多领域,如图像,语音,语言翻译,运动检测等。此外,它已在RATR中使用。冯等人[8]在HRRP上采用堆叠校正自动编码器网络。Housseini等[10]使用卷积自动编码器网络从SAR图像分类目标。Lazarov和Minchev[11]通过两个学习矢量量化神经网络实现了ISAR图像识别。更多的深度学习工作应用于HRRP和图像,但很少考虑使用RCS时间序列。JingyuanXia从RCS时间序列研究了受限制的Boltzmann机器网络用于空间目标识别,并取得了显着的进步[28]。但是,他只区分了不同形状的目标。
我们精心设计了一个卷积神经网络(CNN)结构,该结构被命名为RCSnet,用于弹头和诱饵分类任务,灵感来自深度学习网络的强大表现和分类能力。将该方法与5种著名的传统分类算法进行了比较,该算法在仿真数据集中使用了RCS时间序列的26个选定特征。结果表明RCSnet的性能优于传统的RCSnet。我们还探索了一系列实验,以找到卷积层的最佳滤波器数量和RCSnet的最佳训练方法。
2选择常规方法
为了获得传统方法的最佳分类性能,从RCS时间序列中选择并提取了26个特征,并选择了5种分类方法。
2.1选择常规功能
26个功能包括11个统计特征,12个小波特征,2个Mellin特征和1个光谱特征。
RCS时间序列的统计特征反映了目标结构和微观运动的一些特征,因为RCS测量受到诸如散射特性和目标姿态等因素的影响。11个选定的统计特征是在[13]中使用和验证的RCS时间序列的平均值,最大值,最小值,中值,范围,标准差,标准均值差,变异系数,q阶中心矩,偏度和峰度。。
12个选定的波形特征包括两部分:7个小波分解能量特征和5个RCS时间序列的离散小波变换统计特征。小波分解可以有效地将信号分成不同的频带,信号的能量等于所有频带的能量之和。我们选择了应用于归一化RCS时间序列的七级小波分解,并将重建细节信号的能量用作特征。除能量矢量外,还有离散小波变换的特征
传达目标的不同信息。我们选了五个
离散小波变换W的特征(RCS时间序列的a,b,包括矩阵W(a,b)的平均值,方差,尺度重心,最大值和最大s入值。小波分解能量特征被用于由BinChen等[29]在飞机识别中验证,五个离散小波变换统计特征由TingWang等人[16]验证。
XiaohuiXiang和XiaojianXu证明了Mellin目标RCS振幅时间差分序列的变换反映了散射中心分布和微观的特征。目标的运动表明,RCS时间序列的Mellin变换的平均值和方差是[14]中弹头和诱饵分类的良好特征。因此,我们将常规方法的两个特征包括在内。
在光谱特征中,WenboWei[17]利用归一化RCS时间序列能谱的熵和其他统计特征来识别弹头并证明其有效性。因此,归一化RCS时间序列能谱的熵包含在26个特征中。
对于每个RCS时间序列,通过特征提取过程获得特征向量,该特征向量可以表示为其中d=26。每个特征向量x可以与类标签y一起形成训练样本,类标签y指示目标是弹头还是诱饵。特征向量和标签对构成可用于训练或验证的样本集。
2.2选择常规分类方法
五种分类方法是逻辑回归(LR)模型分类器,LDA,SVM,分类树(CART,分类和回归树算法)和KNN。简要介绍如下。
线性分类器试图从训练大纲中学习广义线性模型来预测测试样本的类别。它通过最大似然法学习模型中的权重和偏移。本文中使用的广义线性模型是LR用于分类。
LDA方法试图学习最佳超线,以便当所有样本投射到该线时,同一类的投影尽可能彼此接近,并且不同类的投影尽可能远离每个其他。然后它通过该线上的投影位置预测测试样本的类别。
SVM方法试图学习具有最大分类余量的超平面,并且内核技术用于处理线性不可分离的问题。本文中用于SVM的内核是径向基函数。
分类树方法试图通过迭代地选择分割属性并基于特定标准生成分类节点来学习决策树。在我们的实验中采用了标准CART算法,该算法选择了最大化所有属性的所有可能分裂的分裂标准增益的分割属性[30]。
KNN方法基于特定距离度量在训练数据集中找出测试样本的KNN样本,并通过投票算法或加权投票算法等根据k个训练样本的信息预测类别标签。
所选择的特征和分类方法已被大量研究人员和工程师使用,并在各种分类应用中得到验证。
3 RCSnet方法
我们精心设计了一个用于弹头和诱饵分类的一维CNN结构,共有43层。我们将这种一维CNN结构称为RCSnet。网络的结构如图1所示,其中#39;Conv#39;是卷积核层的缩写;#39;AvePooling#39;表示平均汇集层;#39;MaxPooling#39;表示最大池化层;#39;FC#39;代表完全连接的层。
网络将512点RCS时间序列作为输入。它有八个卷积层和七个池层。汇集层位于每两个卷积层之间。这里所说的卷积层是指卷积核层和连续激活层的组合。七个汇集层包括四个最大汇集层和三个平均汇集层,它们交替排列。卷积核心层和池化层的填充模式不是填充,以避免提取误导信息。为了从512点RCS时间序列中提取尽可能多的信息,卷积层的步幅是1,并且在每个池化层沿时间轴的输入大小均匀的标准下选择内核大小,以便在二到一个池化操作之后不会有额外的信息丢失。卷积层和汇集层一起可以看作特征提取网络。特征提取网络之后是两个完全连接的层,可以看作是两阶段特征抽象网络。在特征抽象之后,使用softmax层,其输出几个数字指示符,每个指示符用于一个类。数字指示符可以作为类概率重新编写。最后,输出层输出类概率最高的类标签。
图1 RCSnet的结构
表1 RCSnet主框架的详细信息
表1中显示了RCSnet主框架的详细信息,其中演示了网络内部的输出大小变化,并且不包括不改变输出大小的层。图1和表1中的#39;K#39;是RCSnet的第一卷积层的滤波器编号。设置过滤器编号的规则如下:随着层越深,过滤层的数量仅在池化层之后翻倍,并且如果数据流经池化层和丢失层则保持不变。辍学层将在以下文字中介绍。将K的值设置为2n其中的整数是一个好习惯n是正整数,n最好不小于4。
所有卷积层和完全连接层的激活函数是整流线性单元(ReLU)函数,其在数学上由下式给出:
图2 轨迹和雷达的 相对位置 关系
其中x是激活单元的输入。当激活高于0时,ReLU激活函数的偏导数为1.因此,梯度不会沿着网络中有效ReLU的路径消失[31],这使得它优于通常使用的S形非线性函数。深度神经网络。
众所周知,深度神经网络难以训练,因为有大量参数需要学习,每层输入的分布随着先前层的参数在训练期间的变化而变化。为了处理这个被称为内部协方差移位[32]的问题,在每个卷积核心层及其激活层之间采用批量归一化层。
为了减少RCSnet的过度使用,采取了几项措施。首先,将五个丢失[33]层插入网络中。其中四个在每两次卷积操作后使用,最后一个放在第一个完全连接的层之后。AIL位置DET示于图1每一漏失层的脱落概率为0.5。其次,将L2权重规则化应用于卷积核心层和第一个完全连接的层。正则化系数设定为10-7。
训练深度网络是一个高维优化问题。有许多优化器可以用来解决这个问题。我们比较了四种不同优化器的性能,以找到最适合培训RCSne的方法。四个优化器是带动量法的随机梯度下降优化器(SGDM)[34],自适应子梯度法(adagrad)[35],adadelta方法[36]和adam方法[37]。实验细节将在5.3节中介绍。
4 RCS时间序列数据集模拟
4.1数据集生成
我们使用模拟RCS时间序列数据集,因为弹头和诱饵的真实数据超出了我们的范围。
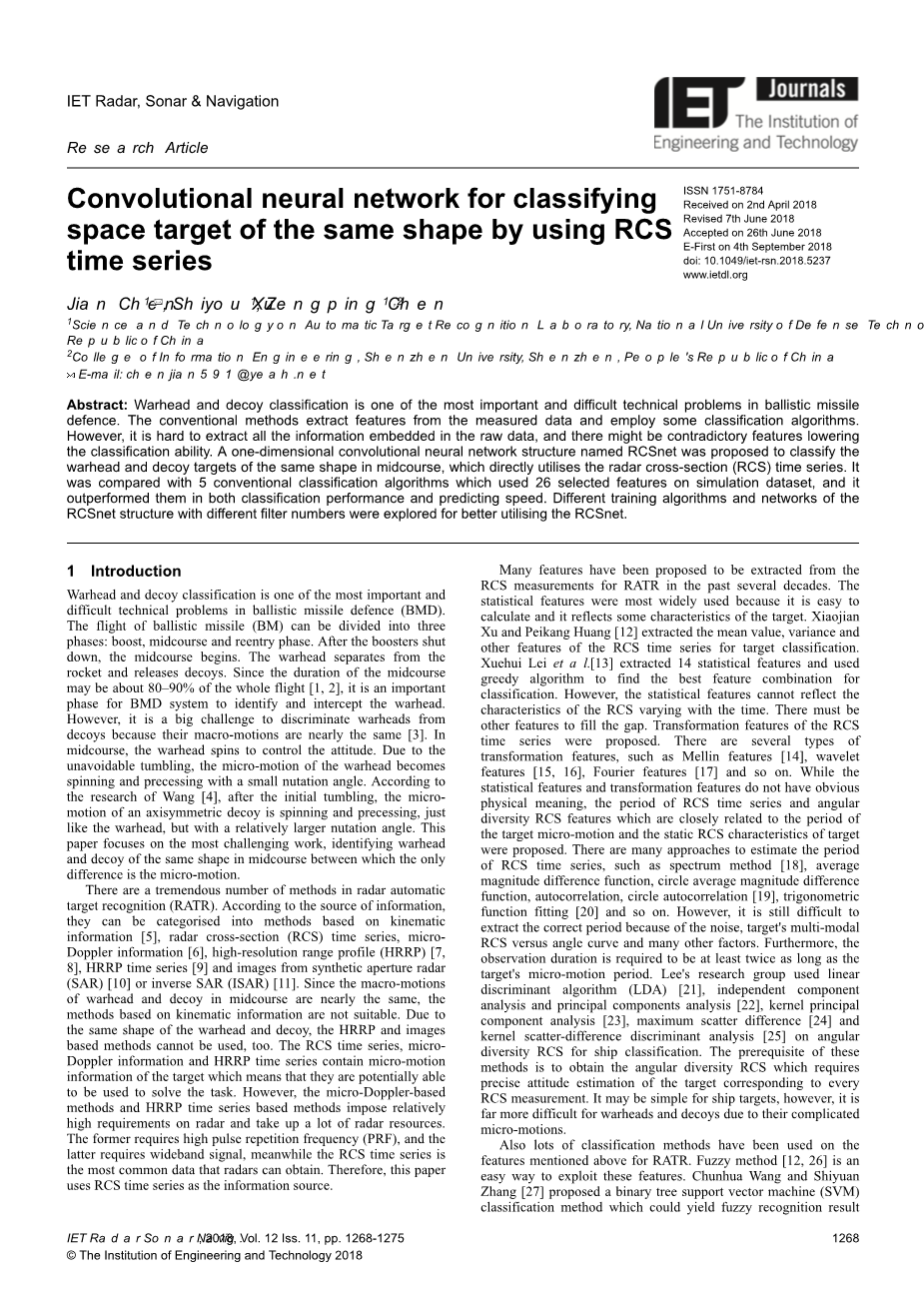
模拟了10个导弹轨迹,每个导弹轨迹都有一个弹头和一个相同形状的诱饵但不同的微动。目标微动参数设置从轨迹变为另一个,但在轨迹期间保持不变。在轨迹中找到七个雷达来观察和测量目标。相对位置相关位置如图2所示。
记录了雷达可以观察到的弹头和诱饵的所有中段RCS时间序列。将记录的长持续时间RCS时间序列切成固定长度的片段以形成训练数据集和验证数据集。
图3 RCS时间序列生成方案
图4 目标物体的3D模型
图5 目标的RCS特性曲线 (a) RCS与角度 d 曲线, (b) 角度 d的 草图
4.2 RCS时间序列生成
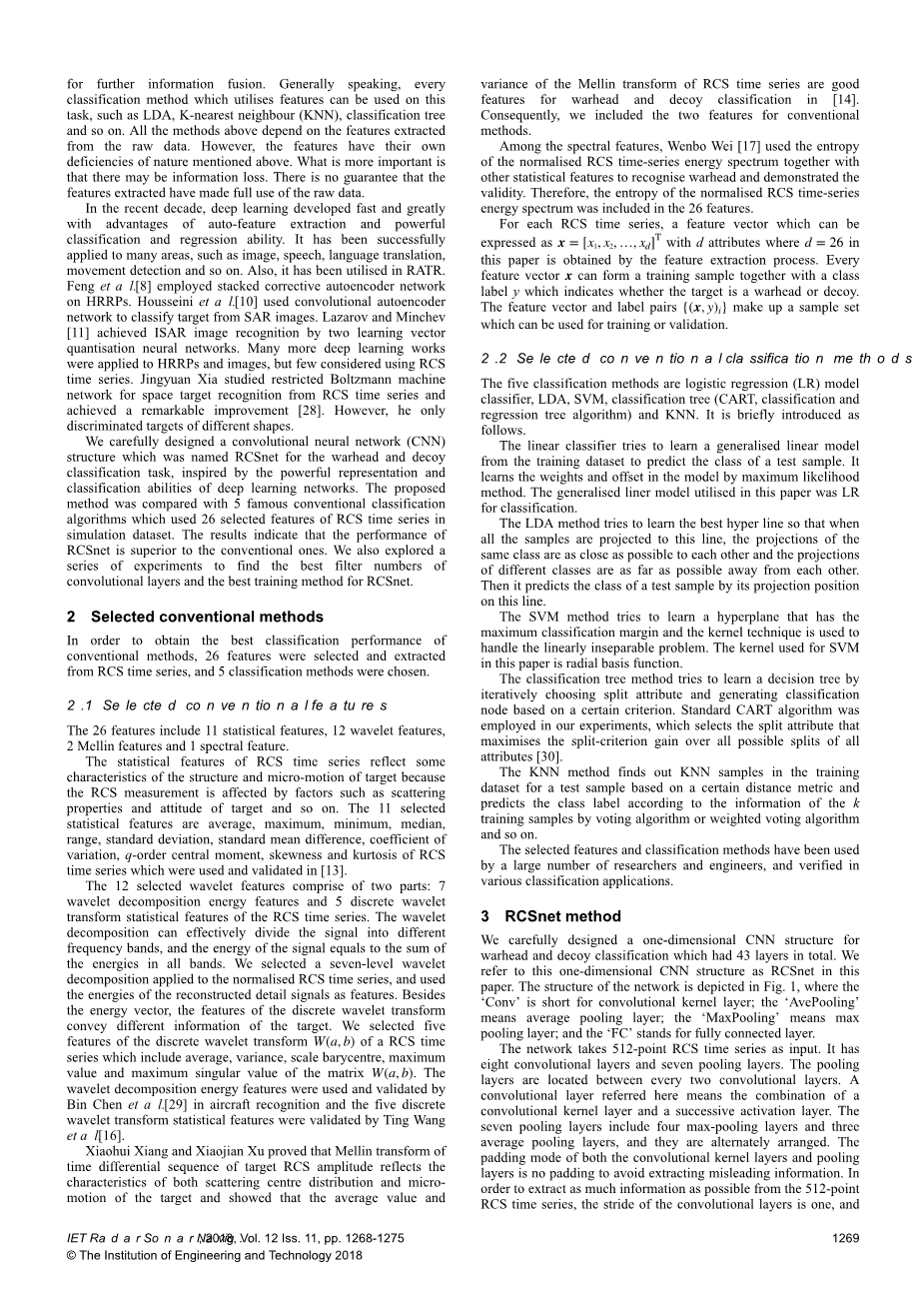
我们尽力通过图3所示的方案生成高保真RCS时间序列。
如图3所示,RCS时间序列生成从三个基本组成部分开始:导弹轨迹,物体微动和物体3D模型。一方面,只要建立了物体三维模型,就可以通过某种电磁计算方法计算某一姿态的目标RCS,另一方面,可以从导弹中获得目标物体的姿态时间序列。轨迹和物体微动。因此,可以逐个计算理论RCS时间序列。通过连续模糊具有乘性噪声和加性噪声的理论RCS时间序列,可以获得“实际”RCS时间序列。生成过程的细节将介绍如下。
当我们专注于相同形状

