
英语原文共 10 页
实时多类运动目标跟踪与识别
摘要:现有的跟踪识别方法主要集中在单类目标上,而系统的跟踪识别方法主要集中在单类目标上。交通管理或智能交通往往需要实时的多类目标跟踪和识别。本研究 提出了一种基于高斯混合部分模型的多类移动目标识别方法。准确定位感兴趣的对象并识别其相应的类别。该方法是多线程的并将软聚类方法与基于多个混合部分的模型相结合,提供稳定的多类目标跟踪。以及视频序列中的识别。该方法的亮点在于其识别多类移动目标的能力,以及在固定焦距的固定摄像机拍摄的视频序列中计算它们的数量。其他贡献 本文提出了一种可扩展的基于零件的对象识别模型。提高系统整体性能,降低时间成本,更好地满足视频系统的实际需求。实验结果表明,该方法在实时多类运动目标跟踪识别中是可行的。
1引言
视频序列中运动目标的跟踪与识别在智能交通系统中发挥了重要作用,如车辆自动定位、交通跟踪等 冲击波和交通监控。以前的大部分工作目标跟踪和识别主要集中在单类目标上。 郑和梁[1]使用一组图像条特征来实现快速汽车检测。老等。[2]提出了一个框架来检测 从摄像机拍摄的监控视频中识别出人类。丹等。[3]开发了一个基于融合深度和视觉数据来计算人数。Nyirarugira和Kim[4]提出了一种自适应差分进化算法手势识别。然而,许多应用程序,如智能运输系统,通常需要多类移动目标跟踪实时识别。本文的主要贡献是 一种有效的多类运动目标识别方法提出了基于高斯混合部分模型(GM-PBM)。 大多数自动化视频监控系统都需要探测视场中感兴趣的运动目标的机制照相机的这种机制一直是许多出版物。基姆等人。[5]使用红-绿-蓝(rgb)具有要提取的敏感参数的背景模型 感兴趣的对象。贾维德等。[6]使用的颜色和渐变开发背景减法的信息感兴趣的目标检测。贝尔森等。[7]提出了优化实时运动物体的非参数背景模型检测。一旦提取出感兴趣的对象, 跟踪和识别的处理在图像的相应区域。在本文中,提取感兴趣区域(ROI)由背景执行 基于高斯混合(GM)软件的减法聚类算法。背景可以用高斯分布的混合[8]。GM模型是一个重要的混合物模型系列。众所周知,任何连续分布可以很好的用一个正态分布的有限混合[9]。高斯混合近似。这种方法因能处理慢速照明变化、长期场景变化和相机噪音而变得流行起来。实验结果和第4节给出了一些结论性的评论。
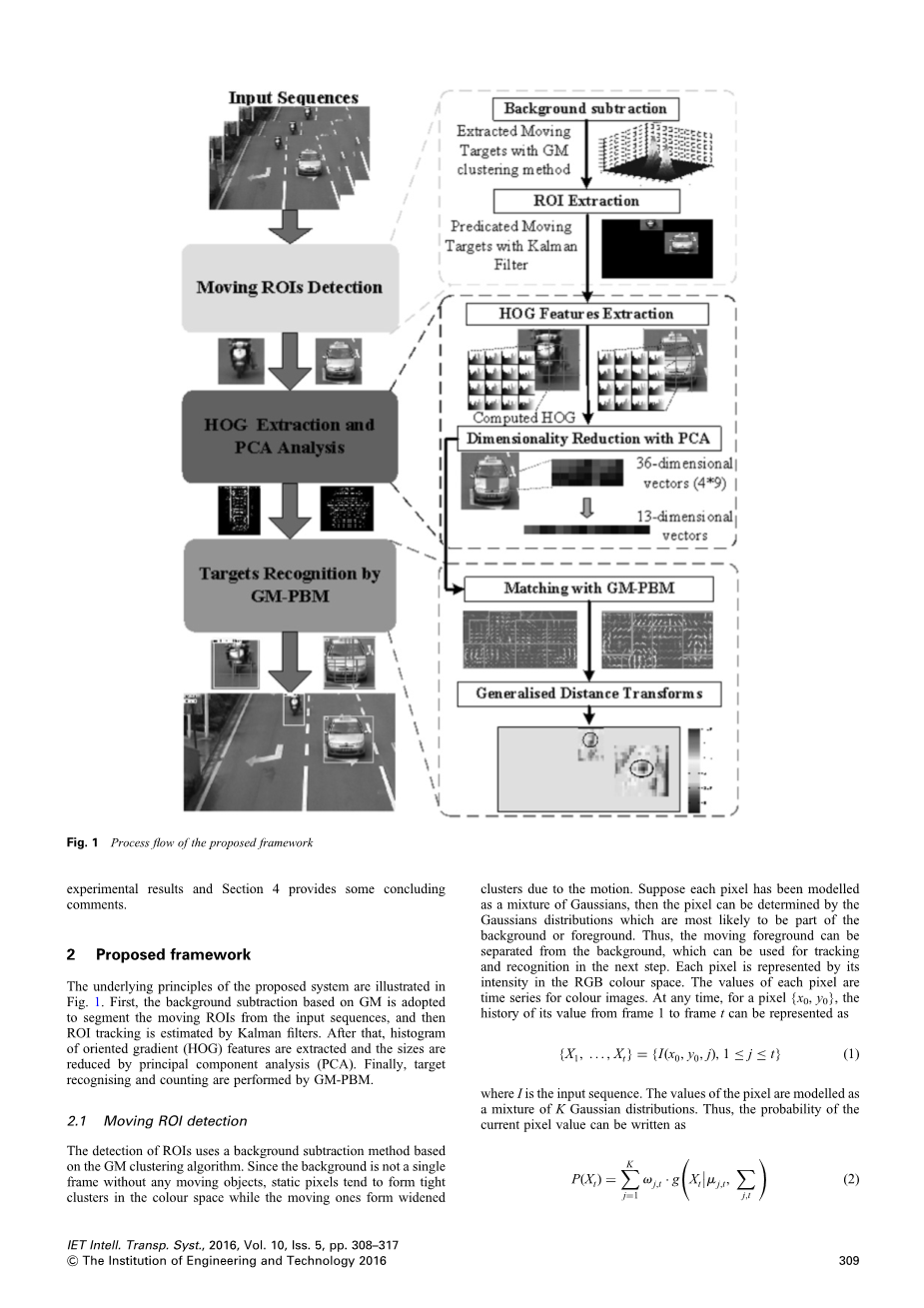
图1拟建框架工艺流程图
2拟议框架
拟议系统的基本原则如所示。 图1。首先,采用基于GM的背景减法。从输入序列分割移动的ROI,然后用卡尔曼滤波器估计感兴趣区域跟踪。之后,柱状图提取定向梯度(HOG)特征,并确定其大小。通过主成分分析(PCA)减少。最后,目标由GM-PBM进行识别和计数。
2.1移动目标区域探测
利用基于GM集群算法的背景亚牵引法检测目标区域。由于背景不是一个没有运动对象的单一框架,所以静态像素倾向于在运动引起的运动范围内形成色彩空间中的强大群集。假设每一个像素都被模拟为高斯人的混合物,那么该像素可以由高斯人的分布来确定,而该分布最适合作为背景或地面的一部分。因此,前地面运动可以与后地面分开,后者可用于跟踪和识别下一步。每一像素都以其强度表示在彩色空间。每一个像素的值是色彩图像的时间序列。在任何时候,对于一个像素{X0,Y0},它们从帧1到帧T的价值的历史可以作为 {X1}hellip;={I(X0,Y0,J),1le;Jle;tgt;(1)
我在那里输入序列。像素的值被模拟为K高斯分布的混合物。这样的话,当前像素值的概率可以写成
图2估计模型参数的GM算法
其中k是分布数,omega;j,t是j高斯分量的权重参数,是t时j高斯分量的概
率密度函数,mu;j,t是平均值,是协方差。在三维颜色空间中,每个分量的密是都是如下形式的三变量高斯函数。
为了获得背景的鲁棒表示,必须更新概率模型,以估计这些参数v j,t,m j,t,j,t随时间的变化。参数初始化使用v j,0,m j,0,j,0表示算法。在下一帧中,有一个新的像素值xt,其中t=t 1。每一个新的像素值都会对照当前的gm分布进行检查,直到找到匹配为止。匹配定义为分布2.5标准偏差内的像素值。在匹配结果的基础上,采用GM算法对参数进行估计,如图2所示。GM算法的主要参数如表1所示。一旦参数初始化,将进行第一次前景检测,然后更新参数。由于已经确定了前景像素,因此需要确定混合物中的哪些高斯代表背景像素。背景估计为
其中,阈值t是场景中背景的最小先验概率。因此,第一个B分布被选作背景模型,其他分布被认为代表前景分布。
基于背景树抖动的输入序列的检测结果。表1 GM算法的主要参数
命名 规范
高斯分布数 k
高斯分布权参数 omega;
高斯分布的平均值 mu;
高斯分布协方差 sigma;2
学习参数 alpha;
学习率 rho;
图3各像素背景更新方案示意图
为了更好地理解该算法的使用,解释背景更新方案的原理是很重要的。图3显示了每个像素的背景更新方案的原理。一旦模型参数被学习,就可以分别确定前景和背景分布的平均值和方差。因此,背景和前景可以进行检测。有两种情况发生:
例1:像素属于背景分布。像素值没有明显变化,像素被视为背景。
例2:像素属于前景分布。如果像素值的变化非常明显,以至于超出了某些连续帧的背景平均值和方差的范围,则该像素被归类为前景。
为了解决长期场景变化(如树的抖动)引起的噪声问题,对产生的背景减法进行形态学运算,去除噪声像素,填充移动区域中的空穴。只有那些大区域被选作这些移动区域的ROI。随后,利用卡尔曼滤波器对连续帧中的连通分量进行预测和跟踪。通过这种方法,我们得到了一组具有边界框的潜在投资回报率假设。图4显示了基于输入序列的检测结果,输入序列的背景具有抖动树。
2.2方向梯度直方图和PCA分析
运动检测后可以找到运动ROI。这些区域将通过滑动窗口进行扫描,然后提取HOG特征。Hog描述符是一种特别有效的目标检测图像特征[19]。Hog背后的基本思想是,图像中的局部物体形状和外观可以通过强度梯度或边缘方向的分布来表征。这些HOG特征的实现可以通过将图像分割成密集的区域网格(称为单元)来实现。对于每个单元,在单元内的像素上计算梯度方向或边缘方向的局部柱状图。然后,这些柱状图的聚合表示描述符。为了提高性能,可以通过计算一个更大的正方形区域(称为块)上的强度来归一化这些局部柱状图,然后使用该值来归一化块中的所有单元格。方向梯度直方图的提取过程如图5所示。
使用矩形hog(r-hog)块将单元的方向直方图归一化,每个r-hog块有2times;2个单元,相邻的r-hog相互重叠,大小为一个块的一半。块归一化的实现如下
从各个块的信息中获得的描述符将在下一步用于目标识别。图6显示了方向梯度直方图提取过程的结果。
为了降低计算成本,采用以下方法。首先,对这些特征向量进行PCA,使模型参数减少,检测速度加快。本文利用13维Hog特征,捕获了四种正态化下的九个梯度方向。其次,由于各个hog描述符的计算过程彼此独立,因此它们是由多线程系统同时计算的。因此,可以获得显著的性能改进。
2.3 GM-PBM多类运动目标识别
用GM-PBM进行目标分类检测,并采用GM聚类方法对每个目标假设进行捕获。每个可变形零件位置都被建模为一个高斯分布,每个零件都有一个固定的最佳位置。然后,零件的位置应服从多重高斯分布。在训练过程中,该模型通过GM聚类学习各部件的最优位置,用于更新PBM的初始锚定。这样,GM-PBM能比常规的PBM更有效地表示物体的变形。GM-PBM的概述如图7所示。整个过程分为两部分:培训和测试。训练过程为离线参数学习,测试过程为视频序列在线检测。带有n个零件的GM-PBM正式定义为
其中,f0是根过滤器;fi,(igt;0)是第i部分的过滤器,di是定义第i部分相对于其锚定位置可变形成本的四维系数向量。B是一个实值偏差项。
图4振动树背景下的运动感兴趣区检测结果
a背景减法的结果
b移动ROI检测结果
图5 ROI特征提取过程
图6 ROI的HOG提取过程结果
a初始移动区域
B HOG的视觉化
图7多类GM-PBM概述
让h和z分别表示ROI的HOG特征金字塔和滤波器f的假设位置。零件的空间参数可以写为
其中f(h,pi)是由过滤器f覆盖的h的子窗口,其左上角为pi,并且
表示可变形特征。假设部分空间分布服从混合高斯分布,假设位置pi=(Xi,Yi)的匹配得分可计算为
其中
式中,k是高斯分量的个数,omega;j,i是第j个高斯分量的结构成本权重参数。这与基于GM聚类算法的背景差分方法(2)是一致的。参数v j,i,m j,i,j,i可以使用相同的想法进行估算。为了检测图像中的对象,每个对象假设的总分计算为
对于多个模型,所有目标的得分可以表示为
一旦检测到一个目标,就计算出分数,并得到一类目标。类似地,通过类别检测可以派生出不同类别的目标。最后,应用后处理技术对输出视频序列中的目标数目进行显示和计数。
- 中定义的评分函数包含指定每个部件FI和偏差B外观的参数。必须学习这些参数,以便它们能够反映相关目标的统计数据。在该模型中,这些参数是通过构造一个用于识别训练的隐变量支持向量机(SVM)来学习的。潜在变量SVM定义为
其中z是一组潜在值。z(x)是x可能的潜在值。要从标记的数据中训练beta;,目标函数定义为
其中
设C为对象类别。c的训练图像由正边界框p和负图像集n给出。p是一组对(i,box),其中i是图像,box是i中c类对象的边界框。gm-pbm算法如图8所示。GM-PBM算法的主要参数如表2所示。
图8 GM-PBM算法。
3 实验结果及演示
所有的实验都进行在一个3.2 GHz8核CPU和消费者一个16级流多处理器GPU的桌面计算机上进行。
3.1为视觉对象类数据2012集培训绩效的评价(voc2012)
首先使用扩展的VOC12012数据集评估GM-PBM模型的有效性。培训了五类目标车型,包括汽车、公共汽车、自行车、摩托车和人。为了提高分类器的性能,丰富了数据集。在数据集中,每个对象类别都添加了230-300个正图像和300个负图像,特别是对于夜间环境中的自行车、公共汽车、汽车和摩托车。每个类别都包含在相同方向上的各种实例。这些正面的例子具有大致相同的纵横比。除了训练集之外,每个对象类别还收集由200个图像组成的独立测试集。对于所有目标类别,每个目标模型都由两个组件(方面)进行培训。由基本PBM和GM-PBM获得的精度-召回曲线如图9所示。更具体地说,图9a-e表示精度-召回曲线,图9f表示GM-PBM和基本PBM分别获得的平均精度(AP)得分。比较表明,在五类目标中,GM-PBM优于基本PBM。
表2 GM-PBM算法主要参数
命名 规范
GM-PBM模型参数 beta;
根过滤器参数 f0
第i部分的过滤参数 FI
第一部分的变形成本 DI
GM-PBM B的偏差项 B
高斯分布数 k
高斯分布权参数 omega;
高斯分布的平均值

