英语原文共 14 页
汽车雷达信号处理技术综述
Sujeet Patole, Murat Torlak, Dan Wang, and Murtaza Ali
汽车雷达以及其他传感器如激光雷达(代表“光探测和测距”)、超声波和摄像头构成了自动驾驶汽车和高级驾驶辅助系统(ADASs)的支柱。这些技术进步是由极其复杂的系统实现的,具有从雷达/传感器到控制器的长信号处理路径。汽车雷达系统负责检测物体和障碍物、它们的位置以及相对于车辆的速度。信号处理技术的发展以及毫米波半导体技术的进步在汽车雷达系统中起着关键作用众多已经开发的各种信号处理技术以在所有测量维度中提供更好的分辨率和估计性能,包括范围,方位角仰角和车辆周围的目标的速度。本文总结了汽车雷达信号处理技术的各个方面,包括波形设计,可能的雷达架构,估算算法,实现复杂度-分辨率折衷,复杂环境的自适应处理,以及与行人检测等汽车雷达相关的独特问题。我们认为,这篇综述文章将把文献中散布的几个贡献结合起来,作为新研究人员的主要出发点,并对现有的研究界成果进行梳理。
介绍
无线电探测和测距的历史,通常被称为雷达,开始于Hertz和Huuml;lsmeyer对电磁(EM)波的反射以及Tesla和Marconi在19世纪末和20世纪初倡导的观点所进行的实验。雷达技术的早期发展仅限于军事应用,如飞机/船舶监视,导航和武器制导。雷达目前用于许多应用,包括民用航空,导航,测绘,气象,射电天文学和医学。雷达系统的主要目标是检测一个或多个感兴趣目标的存在并估计它们相对于雷达的距离,角度和运动[1]。
对于日常人来说,雷达的有形应用包括执法人员用来检测超速驾驶员的速度枪。电影中的动作英雄有时驾驶一辆具有吸引力的功能的精美汽车,可以跟踪敌人的速度和位置,在障碍物中快速自动移动,并在电影高潮期间首次亮相夜视功能。通过蓬勃发展的毫米波电路技术和先进的信号处理技术,将所有这些附加装置用于汽车的雄心壮志已经变得可行。通过新的信号处理算法,机器学习,人工智能和计算机视觉技术加强的电路技术的进步使自动驾驶汽车成为现实。
这种汽车还依赖于不同的传感器,例如激光器,摄像头,超声波,全球定位系统和雷达。在这些传感器中,雷达提供了在能见度较差的情况下在汽车前方看到长距离的可能性,这有助于避免碰撞[2]。例如,谷歌的自动驾驶汽车[3]的雷达安装在车辆的前后保险杠上,以检测周围环境中的物体。
汽车雷达几十年前首次部署。汽车雷达从开始到现在的演变已在[4]中得到了充分讨论。凭借硅片中高度集成且价格低廉的毫米波电路,紧凑型汽车雷达安全系统已成为一种流行的功能[5-6]。从那以后,关于汽车雷达的评论文章主要涉及电路实现、市场分析和架构级信号处理[7-9]。然而,汽车雷达信号处理技术的许多方面分散在文献中。例如,文献的一部分可以集中于检测是否存在目标,而另一个可能会考虑雷达估计问题,涉及它们在空间中相对于雷达的位置和速度[10-11]。
本文的目的是回顾用于估计重要目标参数(如范围、速度和方向)的信号处理技术的主要发展。本文还讨论了雷达波形的特征描述和先进的估算技术,这些技术可以增强汽车雷达的运作功能。特别是,我们使用适当的数学框架审查每个主题,以使其成为该领域新的研究者的良好启动文件。
汽车雷达分类
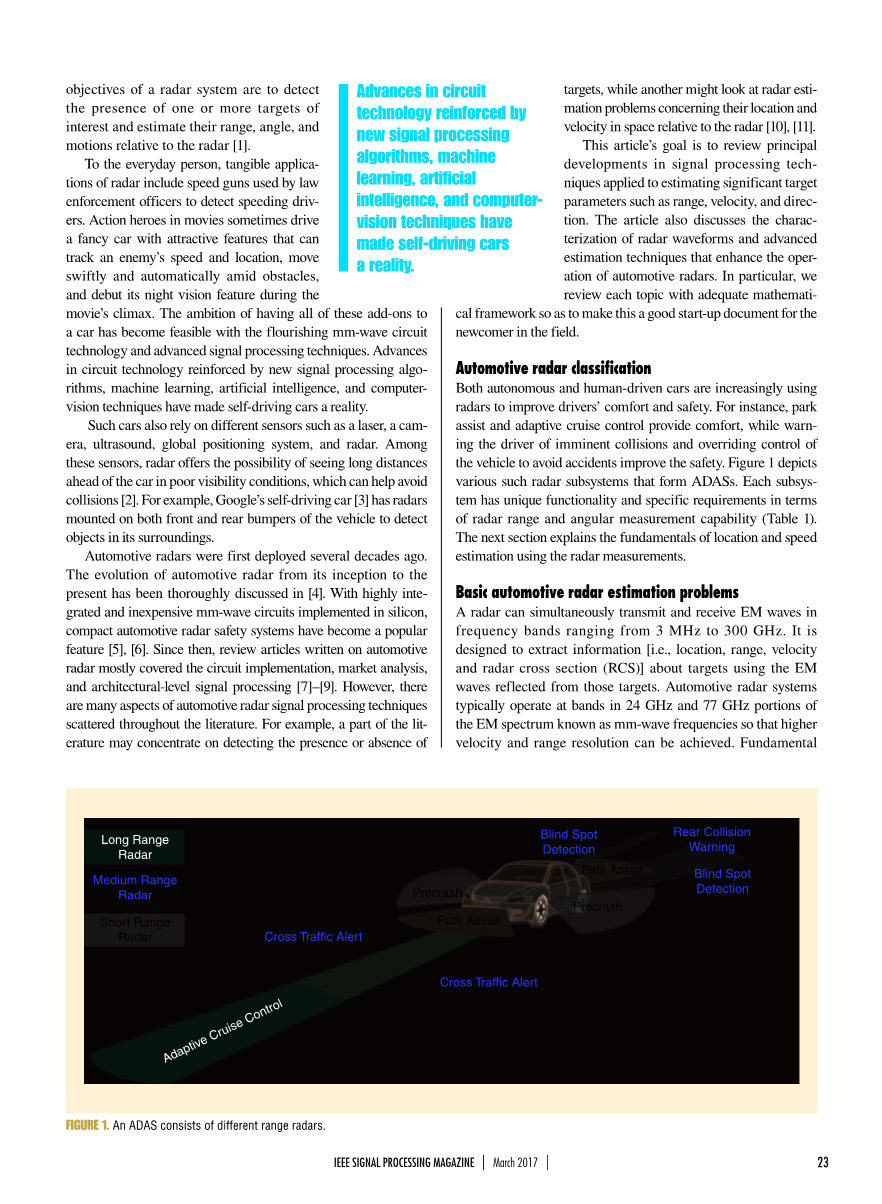
自动驾驶汽车和人力驾驶汽车越来越多地使用雷达来提高驾驶员的舒适性和安全性。 例如,停车辅助和自适应巡航控制提供舒适性,同时警告驾驶员即将发生碰撞和超控车辆控制以避免事故提高安全性。图1描绘了形成ADASs的各种这样的雷达子系统。 每个子系统在雷达范围和角度测量能力方面具有独特的功能和特定要求(表1)。 下一节将介绍使用雷达测量的位置和速度估算的基本原理。
图1 自动数据采集系统由不同距离的雷达组成
基本的汽车雷达估算问题
雷达可以在3MHz至300GHz的频带内同时发送和接收EM波。它被设计成使用从那些目标反射的EM波提取关于目标的信息即位置、范围、速度和雷达截面(RCS)。 汽车雷达系统通常在称为毫米波频率的EM频谱的24GHz和77GHz部分中工作,从而可以实现更高的速度和距离分辨率。基本雷达操作涉及三个主要任务:范围(距离),相对速度和方向估计,如下所述。
表1 按照距离的汽车雷达分类
距离估计
距离估计距离估计是汽车雷达的基础。基于EM波传播到该目标和从该目标传播的往返时间延迟来确定到目标的范围,其中是以秒为单位的往返时间延迟,并且c是以米/秒为单位的光速 。因此,的估计使得能够进行范围测量[1]。雷达发射的EM波(信号)的形式对于往返时间延迟估计是重要的。例如,脉冲调制连续波(CW)由周期性和短期功率脉冲和静默期组成。静音周期允许雷达接收反射信号,并作为雷达执行距离估计的定时标记,如图2所示。
图2 具有测距功能的脉冲CW雷达
但是,未调制的CW信号不能用于距离估计,因为它们缺乏这样的时间标记。另外,从目标反射的信号应该在下一个脉冲开始之前到达。因此,雷达的最大可检测范围取决于脉冲重复间隔。从雷达发射的信号直到被接收回来的信号由于路径损耗和来自目标的不完美反射而经历衰减。另外,所接收的目标信号受到雷达电子设备中的内部噪声和干扰,该干扰可能是来自不感兴趣的物体的反射信号的结果,并且可能来自人造源(即干扰)。典型的往返时间延迟估计问题仅考虑加性高斯白随机过程形式的环境噪声。假设解调已经去除了载波,使得基带处的目标信号可以被建模为
其中是复数标量,其幅度表示由于天线增益,路径损耗和目标的RCS引起的衰减,w(t)是加性高斯白噪声,具有零均值和方差。 目标是在完全了解发射雷达波形的情况下估算。 假设信号具有单位幅度和有限能量,理想的雷达接收器可以使用具有脉冲响应的匹配滤波器 来找到,其最大化信噪比输出。 因此,匹配的基于滤波器的接收器找到发送信号和接收的反射脉冲之间的相关性
时间延迟的最大似然(ML)估计是匹配滤波器输出的幅度达到峰值的时间
噪声的存在会扰乱峰值的位置,这将导致估计误差。 此外,雷达需要确定接收信号是否实际包含来自目标的回波信号。 大量的经典雷达文献致力于开发提供最有利检测性能的策略。可以基于统计假设检验(目标存在与否)来制定典型的决策策略。这导致在匹配滤波器输出处进行简单的阈值测试。 范围分辨率是另一个关键性能指标,表示区分密集目标的能力。只有在时域中产生非重叠返回时,才能在范围域中分隔两个目标。因此,范围分辨率与脉冲宽度成比例。换句话说,更精细的脉冲提供更高的分辨率。 然而,较短的脉冲包含较少的能量,这意味着较差的接收器信噪比(SNR)和检测性能。 如“雷达波形”部分所述,这个问题通过称为脉冲压缩的技术克服,该技术使用相位或频率调制脉冲。
速度估计
目标速度的估计基于称为多普勒效应的现象。假设图2中显示的汽车正以差速向前移动。v由于两辆车之间存在相对运动,反射波会延迟时间 。时间相关的延迟项导致接收波中的频移,称为多普勒频移 。多普勒频移与波长m成反比,其符号为正或负,取决于目标是接近还是远离雷达。虽然可以使用CW雷达检测到这种频移,但它缺乏测量目标范围的能力。在这里,我们讨论使用调频(FM)CW脉冲的脉冲雷达配置,并在多目标交通场景中提供同时的距离速度估计。
FMCW雷达发射周期性宽带FM脉冲,其脉冲频率在脉冲期间线性增加。对于载波频率 和FM调制常数K,单个FMCW脉冲可写为见图3(a)。
从目标反射的信号与发射信号共轭混合以产生低频差拍信号,其频率给出目标的范围。对P个连续脉冲重复该操作。图3(c)中的二维(2-D)波形描绘了在两个时间索引上排列的连续反射脉冲。慢速时间指数p简单地对应于脉冲数。另一方面,快速时间索引n假设对于每个脉冲,以频率 对相应的连续差拍信号进行采样,以在该持续时间内收集N个样本。T假设单个目标并忽略反射信号失真,FMCW雷达接收器输出作为这两个时间指数的函数由下式给出:
因此,如图3(c)所示,可以应用跨快速时间n的离散傅里叶变换以获得拍频 与多普勒频率 耦合。该操作也称为距离变换或距离选通,其允许通过在慢速时间上应用第二傅立叶变换来估计对应于唯一距离门的多普勒频移。通过使用2-D快速傅里叶变换(FFT)可以有效地找到距离多普勒图。基于前述讨论的说明性示例在图3中示出。
图3 (a)固定载频频谱图 (b)典型的交通场景 (c)77GHz FMCW雷达二维联合距离-多普勒估计
图4 (a)具有不同目标反射的典型交通场景图 (b)使用均匀线性天线阵列的方位角估计设置
方向估计
使用诸如FMCW的宽带脉冲可以区分距离和速度上的目标。方向上的区分可以通过天线阵列进行。图4(a)描绘了一个真实的交通场景,其中有几个目标围绕雷达收集来自它们的直接和多径反射。在这种情况下,为了在空间上解决等距目标并提供交通场景的综合表示,应估计目标的角位置。因此,在汽车雷达中,目标的位置通常根据球面坐标系 来描述,其中分别表示方位角和仰角。然而,在这种情况下,在距离-速度估计问题中使用的单天线雷达设置可能是不够的,因为测量的时间延迟 缺乏关于角度位置的信息。
为了实现方向估计,雷达应该收集跨越多个不同维度的反射波数据。例如,使用2-D中的EM波定位目标需要来自对象的反射波数据以两个不同的维度收集。可以使用时间,频率和空间的组合以多种方式形成这些不同的尺寸。例如,线性天线阵列和诸如FMCW的宽带波形形成两个独特的维度[13-14]。另外,毫米波波段中的较小波长对应于较小的孔径尺寸,因此,许多天线元件可以密集地封装到天线阵列中。因此,更强和更锐利的有效辐射束反过来增加了角度测量的分辨率。
考虑位于平面中的天线阵列,并且令l是对应于每个接收机天线位置的横坐标[见图4(b)]。令是球面坐标中第q个目标的位置,以相对于雷达的速度移动。在远场近似[15]的帮助下,对于第q个目标,位于原点的发射机和位于坐标l的接收机之间的往返时间延迟由下式给出:
其中d是以线性星座排列的天线单元之间的距离(通常是波长的一半)。组合(5)和(6)给出了三维(3-D)FMCW雷达输出信号,其能够估计距离,速度和角度。对于Q个目标,信号可以表示为
其中a和对应于范围估计问题中解释的相同数量。延迟项 在天线单元上产生均匀的相位进展,这允许通过空间域中的FFT估计角度,如(7)所示。因此,可以通过3-D FFT联合估计目标的2-D位置(范围和角度)和速度。稍后将在“高级估计技术”部分重新讨论目标位置和速度估计问题,更加强调高分辨率算法和计算复杂性分析。
雷达波形
表1中总结的各种汽车雷达等级在若干基本雷达系统性能指标方面具有不同的规范,例如距离分辨率,速度分辨率,角度方向,SNR和目标检测概率。 雷达采用的波形类型是影响这些指标的主要因素。 表2中总结的雷达波形可以表征它们是CW,脉冲和频率,还是相位调制。 调制雷达波形包括FM CW,步进频率(SF)CW,正交频分复用(OFDM)和频移键控(FSK)。 每种波形类型在处理,实现和性能方面具有一定的优势,如下所示:
表2 雷达波形
在CW雷达中,高频发射和接收信号的共轭混合以目标的多普勒频率产生输出信号。 频率测量的分辨率与信号捕获的持续时间成反比。 波形的连续性质排除了往返延迟测量,这对于目标的距离估计是必要的[见图5(a)]。
因此,除了易于实施和检测目标速度的能力之外,CW雷达还不能提供距离信息。
脉冲CW雷达可以如前面“基本汽车雷达估计问题“部分所述估计距离信息”。可以通过使每个脉冲更长并测量发射和接收脉冲之间的频率差来估计多普勒频率。如图5(b)所示,脉冲持续时间和脉冲重复频率(PRF)是设计具有所需范围和速度分辨率的脉冲CW雷达的关键参数。
FMCW,也称为线性频率调制(LFM)chirp信号,用于同时进行距离和速度估算(有关详细信息,请参阅“速度估算”部分)。由于脉冲压缩,范围分辨率与FMCW信号的带宽成反比,并且与脉冲宽度无关。例如,短程FMCW雷达使用超宽带(UWB)波形来测量具有更高分辨率的小距离。多普勒分辨率是脉冲宽度和用于估计的脉冲数的函数。因此,FMCW雷达具有以高分辨率测量距离和速度的能力,广泛用于汽车工业。
与FMCW波形相反,FSK和SFCW的频率以离散方式变化[见图5(c)]。在这种情况下,目标的范围轮廓和在离散频率处收集的数据形成逆傅里叶变换关系。而且,可以采用混合波形类型来实现附加性能。 FSK波形可与多斜率FMCW波形组合,以克服雷达处理中的重影目标[16]。类似地,CW和FMCW的交替脉冲用于精确估计距离和多普勒[17]。
OFDM可被视为另一种多频波形,它提供了汽车雷达和车对车通信联合实施的独特功能[18-19]。对于雷达操作,通过选择比最大多普勒频移更多的载波间隔来确保OFDM子载波之间的正交性,并且选择的循环前缀持续时间大于最长的往返延迟[见图5(d)]。通过频域信道

