英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
包含慢移动点目标的红外图像序列的参数时间压缩
摘要
红外(IR)图像序列通常用于在出现云杂波或背景噪声的情况下探测移动目标。这项研究的重点是在尺寸上小于一个像素的缓慢移动点目标,例如从传感器到远距离的飞机。由于将IR图像序列传输到一个基本单元或存储它们消耗了大量的时间和资源,因此,一种保持点目标探测能力的压缩方法是非常可取的。在这项工作中,我们引入了一个新的参数时态压缩,它包含了高斯拟合和多项式拟合。然后,我们在空间上进行空间压缩,用最少的位数表示每个参数,以表示由时间压缩所提取的参数的参数,接下来是位编码,以实现数据存储和跨任务的序列的端到端压缩过程。我们利用方差估计比值分数(VERS)对所提出的压缩方法进行了评估,这是一个信号-噪声比(SNR)的基于点目标检测的度量方法,它对每个像素进行打分,并生成一个SNR分数图像。高像素分数表明目标被怀疑穿过像素。从这个分数图像中,我们计算出电影的得分,这些分数接近原始序列。并提出了一种新的目标轨迹自动检测算法。该算法从SNR分数图像中提取目标位置,利用Hough变换在评估过程中获得。该算法产生了一个相似的检测概率(PD)和错误的报警概率(PFA)和原始序列。新参数时间压缩的参数成功地将目标与背景区分开来,产生高PDs(超过83%)的低PFAs(低于0.043%),不需要计算像素值,也不需要对目标轨迹进行自动检测。
关键词:(100.2000)数字图像处理;(100.4999)模式识别,目标跟踪。
1.介绍
红外成像序列用于在出现云混沌或背景噪声的情况下自动检测移动目标[1-3]。特别是,点目标检测是在各种红外(IR)监视应用程序[3]中执行的。我们关注这种包含点目标的IR视频序列。这样的序列包含大量的数据,它们的传输和存储非常耗费时间和资源。在今天的情况下,每一条信息都会被监视,记录和保存供以后使用,如解除简报时,或需要及时收到总部进行更高级别的决定时,视频序列的大小应为尽可能最小化地存储和存档,或者在繁忙的网络上更快的分发传送。为了减少所需的时间和资源,需要一种保持点目标检测能力的压缩方法。大多数压缩方法处理的图像或视频流被设计为被人观看,或者包含在压缩前可以在空间上被探测到的大目标。在图像和视频压缩标准中使用的通用压缩算法,包含一个空间有损压缩的阶段,可以减少高空间频率的系数,并可能导致一个点目标丢失或被抹去。视频序列压缩的第二个方面是时间。视频流的常见时态压缩算法涉及到运动的图像处理和补偿,其中最好的空间匹配从当前帧和之前的或下帧之间进行搜索[4,5]。在这种情况下,如果有其他更大的匹配元素如云,那么在IR序列中的点目标的单个像素将被忽略。
因此,我们以有损的方式压缩序列,这改变了时间特征,但是仍保持其一般形状,更重要的是维持目标的检测性能。在我们以前的工作[1,2]中,我们引入了两种有损时间压缩方法 - 离散余弦变换(DCT)量化和抛物线拟合的IR图像序列,其包含尺寸小于一个像素的慢移目标存在不断变化的云混乱或背景噪音。这些压缩方法可以保持点目标检测能力,并可以跟随无损空间压缩阶段。传感器的原始数据检测算法并不实现,而是将数据压缩后进行评估[1]。
我们的压缩算法的性能是通过压缩比来评估的,以及每一个像素的检测分数(方差估计比分数值)、一个信噪比(SNR)的整个序列的检测方法,以及检测的概率(PD)和假警报(PFA)。然后,将压缩方法的结果与原始序列的分数和先前引入的DCT量化(1、2)压缩序列进行比较。
在压缩之前,我们提取每个时态配置的噪音水平。它被用作高斯白高斯噪声的标准偏差(WGN),在压缩计算的同时,将其添加到时间剖面上,以补偿由压缩引起的平滑(1、2)。
我们目前的工作涉及如下。首先,从VERS结果得到PD和PFA,我们开发了一种基于使用Hough变换的直线提取的目标轨道检测的新算法(第4节)。其次,噪音水平计算过程从以前的工作[1,2]修改为抑制杂波,并改善目标检测(第5节)。最后,我们引入了一种新的时间压缩方法,即参数时间压缩(PTC),其中时间分布拟合成高斯形状,直线或抛物线(第6节)。然后对高斯和多项式的参数执行位分配和位编码,以产生原始数据的紧凑表示。目标峰值最好由高斯表示法描述,参数的散点图显示目标和背景像素参数之间的明确区别。然后,通过从背景中分类目标像素,将这种区别用于简单有效的检测过程,从而产生高PD和低PFA值。
本文的结构如下。第2节介绍了原始和合成的IR序列。第3节处理得分和评估指标。在第4节中,我们详细介绍了用于检测目标轨迹的自动化算法。修改的噪声估计如第5节所示。第6节详细介绍了所提出的有损参数时间压缩方法,然后进行了水印压缩和位编码。第7节包含了所提出的压缩方法的结果。第8节总结了本文,概述了我们未来工作的计划。
- 红外序列
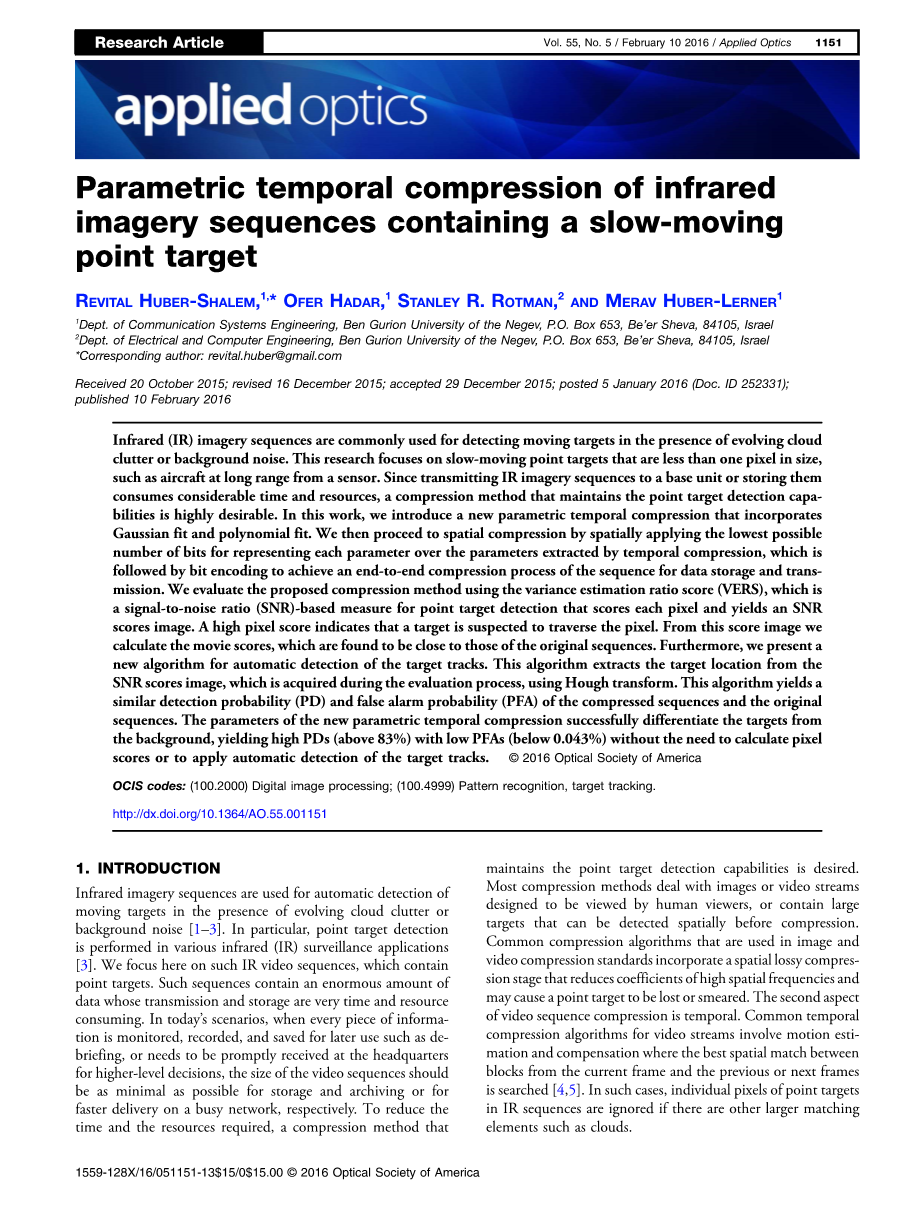
这项工作中使用的IR图像序列是从美国空军网站获取的[6]。 使用具有3.4至5.0微米的光谱区域和40和24微米的正方形像素尺寸的两个IR摄像机获取数据。 这些序列包含每帧大小为244times;320像素的95或100帧(取决于序列)和12位像素表示。 帧速率为30帧/秒(fps)。 由于用于这一场景的传感器固定在地面上并指向天空,所以信号的时间变化源于杂波(云),目标的运动和背景噪声。 序列包括一个或两个慢速目标,横跨不同类型的天空元素 - 云(杂乱占主导)或清澈天空(噪声主导)[7-11]。 我们使用的IR序列如图1所示。 1,其对应的目标位置在白色方块。 他们各自的场景类型如表1所示。
图1(a)J2A的代表性框架和目标位置,(b)J13C,(c)NA23A,(d)NPA
表1 IR图像序列特征[1,2,10,11]
|
影像 |
目标 |
背景 |
|
J2A |
两个高速目标 |
蓬松的云彩 |
|
J13C |
一个低速目标 |
强烈的云彩 |
|
NA23A |
一个中速目标 |
有点明亮的云彩 |
|
NPA |
两个低速目标 |
微弱的云彩 |
|
M21F |
- |
炎热的夜空天空,没有云 |
原始目标被时间噪声像素代替,平均强度作为其空间邻域的平均值。这种类型将不同背景的一个目标与无云天空结合到强大的云层,改变了目标像素分数与背景像素分数之间的比例,并测试了在不同背景上检测目标的能力。这些影像被命名为a-j2a,a-j13c,等等。
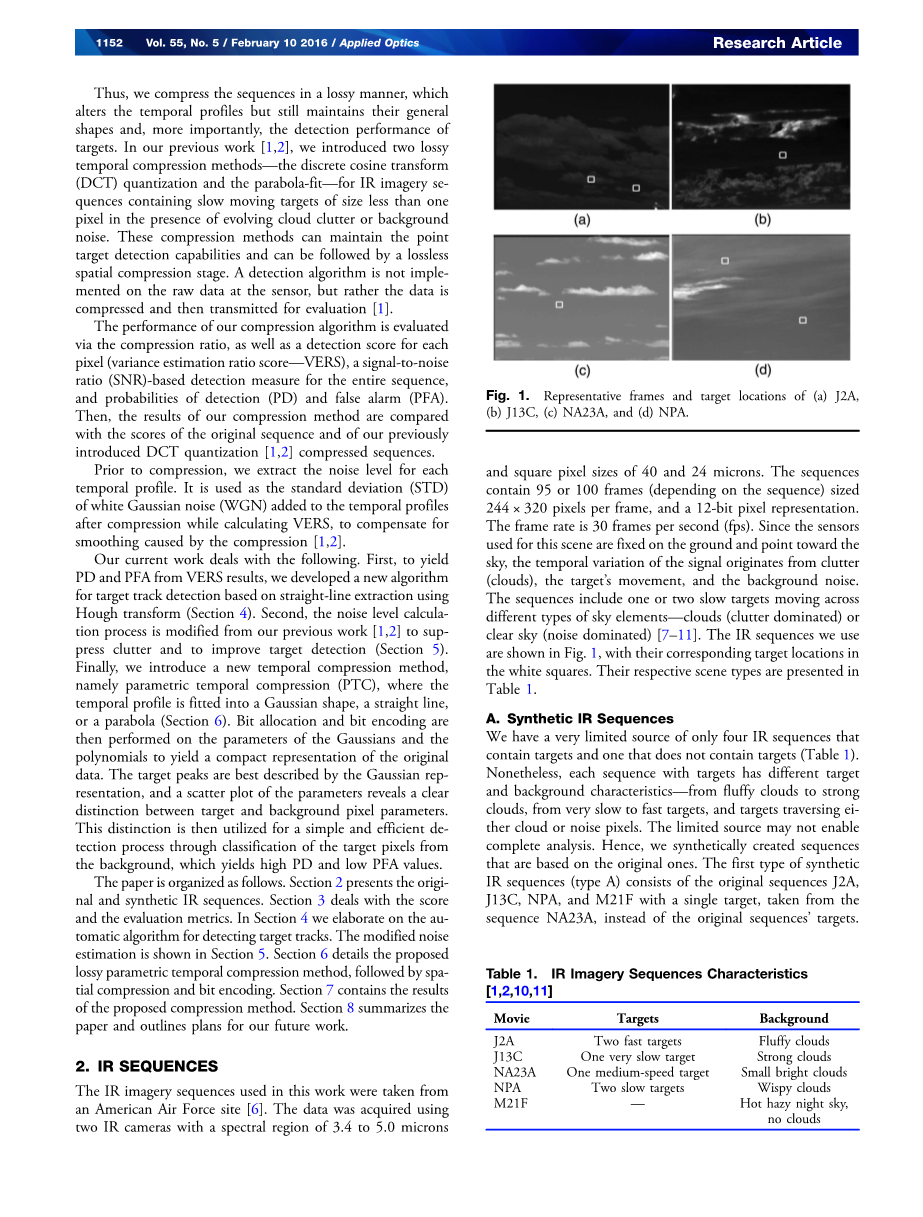
第二种类型(B型)包括最初的IR序列J2A、J13C、NPA和NA23A,其目标速度比原来的速度慢两倍或更快,而J13C的速度是原来的两倍和四倍。对NA23A来说,一个较慢的目标像素的例子显示在图2中。由于我们处理的是缓慢移动的点目标,在5 - 30帧范围内的峰值宽度,我们扩展了这个范围内的变化,甚至是减慢速度。更快的速度被认为是快速的目标,并且超出了这项工作的范围。影像的名称包含了它们各自的新目标速度,如“J2Afast2”、“J13Cfast4”、“NA23Aslow2”等等。
图2 来自NA23A目标像素(136,130)的时间轮廓
- 原始序列和(b)型b(较慢的目标NA23Aslow2)
3.评分和评价标准
点目标通过像素的时间分布具有高峰和窄峰,其中点源的强度与峰的高度成比例,并且点源的速度与峰的宽度成反比[1,2,7-9]。 由于不能在空间上检测点目标,因此使用时间过程分别对每个像素进行评分。 该时间过程将像素的时间分布的总体估计方差(时间分布的K最小方差值sigma;〜2i的平均值)和其最大波动sigma;2max进行比较,因此被称为方差估计比分数(VERS)。 如果这个波动足够高,那么像素值就会被怀疑是一个目标[1,2,10,11]。首先通过用于平均估计的重叠线性拟合(LF),然后通过滑动方差来计算方差。像素值是通过公式
(1)计算的。
VERS是一种简单的测量方法,它在噪音和杂乱的背景中表现良好,并且比大多数背景像素(10,11)产生更高的像素值。图3显示了四个序列的像素值图像,同时聚焦于目标位置。目标轨迹清晰可见。
这些像素分数用于通过应用SNR测量来计算电影得分。 第一步将像素分数图像划分为大小为30times;30的空间块,并将每个块(分数块)作为块中最大NM像素分数vi的平均E·得分,其中M是最大NM分数组 ,除以不属于最大组M的像素分数的平均值除以不属于M的像素分数的标准偏差(STD)。块的分数是通过公式计算的(2)。
图3 像素的图像(a)J2A,(b)J13C
(c)NA23A和NPA
第二步是以类似的方式计算总的影像分数(),但它使用的是块分数,已知的目标块(TB)替换了最大值的分数组。随着影像的得分越来越高,目标检测任务变得更加容易[1,2,10-13]。总的影像分数是通过公式(3)计算的。
另一个评估指标是在时间和空间压缩和位编码之后对电影的压缩。 称为总压缩比(TCR)。 TCR在压缩之前以原始影片的大小(以字节为单位)进行计算,除以压缩后的大小,如下所示:
(4)
4.目标跟踪检测
在[1]中,我们提出了自动检测将高分像素组合成可疑目标轨迹的目标轨迹,并消除不符合直线标准的组,这源于非预期转换目标与 作为被检查的电影,短时序列中的像素之间的直线轨迹中的恒定速度。 在这里,我们提出一种更快更有效的分组方法,不需要分别检查每个高分像素的邻居。 由等式 (1)创建一个像素分数图像,我们应用二值图像中的阈值结果。 这个二进制图像,其中1代表高分像素,是基于霍夫变换的新分组方法的输入。 该变换用于直线检测; 这些线上的像素被怀疑属于目标轨道。其中x和y是图像中的像素坐标。
霍夫变换[14,15]使用两个变量提供一条直线的参数表示法; 从原点到线-rho;的距离,其为垂直于被检查直线的线的长度,以及原点与垂直线-theta;之间的角度,其是原点和该垂直线之间的角度。通过公式(5)来计算距离rho;。其中x和y是图像中的像素坐标。
在霍夫变换空间中,图像中的像素被表示为正弦曲线,变换空间中的点表示图像域中的直线。因此,在变换空间中相同点交叉的正弦曲线实际上表示沿同一行的像素[14]。因此,变换空间中的一点中的重合正弦曲线的数量等于图像空间中沿该线的像素量。像素数量的阈值给我们留下了最像素线的参数。
图4给出了目标跟踪检测流程图。首先,我们只使用通过阈值th_score的高分像素,其阻塞分数也超过阈值th_blk_score。块分数(这是用于测量的度量电影得分计算[1,2,10,11])表示最高记分像素在其邻域中的突出显着,因为具有许多高分像素的块可能主要包含杂乱而不是真实目标。通过这两个阈值的所有像素然后被转发到Hough变换阶段。最高的霍夫变换等级表示检测到的像素组,其被认为属于目标轨道。霍夫变换成像阈值。只有最高的霍夫变换等级才能被提取到下一个像素组中。第四步涉及匹配足够大的组,其超过最小组大小th_size,具有长线特征,意味着非常低的纵横比[等式(6)],其中最大AR为th_AR [1],因为我们假设目标轨迹类似于直线。使用主成分分析(PCA)计算组和主要轴(组的长度和宽度)。宽高比是(6)。
第五步使用滞后,这使得高分数像素可以被视为目标(距离阈值为th_dist_h)的像素足够接近轨道。
最后,如果一个像素属于通过最后一个阶段的组,那么它被检测为包含一个目标。
图4.目标轨迹检测算法的流程图
6: 检测到像素
5: 近像素滞后
1:分数gt;th_score 并且blk_scoregt;th_blk_score?
2:霍夫变换
3: 检测具有最高霍夫等级的线。是否检测到线?
4: 该组是否有二维形状?
是
否
是
否
NO
否
是
- 噪声估计
由于时间压缩减少了每个像素的时间噪声,时间轮廓被平滑,它们的方差也减少了。因此,最小方差的平均值也减少了,从而增加了非目标像素的方差比估计。图5(a)中发现了一个例子,在这里,压缩将原始的时态轮廓(黑色)变成一条直线,在两个非常小的峰(灰色的)旁边。这些山峰被翻译成图5(b)(灰色)中的小变化。但是由于计算的结果,这个像素值,即最大方差(0.5)和K最低方差(0)之间的比值,发散到无穷大[参见Eq(1)]。
因此,白高斯噪声(WGN)被加到解压缩信号[2,16,17]。 WGN对蓝天场景,夜景或时间上固定的混乱模拟了速度噪声[18],尽管它在云像素的多个配置文件中不占主导地位。 尽管如此,噪声水平(包括强度波动)对于WGN的STD估计是必需的,其补偿压缩期间发生的平滑。 因此,云的实际形状或强度对于检测不太重要。 根据理论噪声形状[18],并根据我们的仿真结果(第7节),这种噪声有助于提出压缩后的点目标检测性能。 使用从第q个系数开始的当前像素的时间1D
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[487451],资料为PDF文档或Word文档,PDF文档可免费转换为Word

