
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
高压交流伺服电机驱动定量泵的节能控制
1.北京理工大学伺服运动系统驱动与控制重点实验室,北京100081电子邮件:920231051@qq.com
摘要:为了在保证控制性能的前提下提高电液伺服系统的节能性能,提出了一种高压交流伺服电机驱动定量泵的节能控制方法。首先,建立了伺服电机和定量泵的理论模型。然后,提出了包含两个变量的节能控制器。安全阀控制器是基于扩展状态观察器设计的,用于观察未知的干扰力。基于自适应预测方法设计了伺服电机控制器,用于预测负载位移。使用这两个子控制器可以降低供应压力和供应流量,从而节省能源。
关键词:伺服电机定量泵流量预测压力观测节能
引言
电液伺服系统具有控制精度高,负载能力强,频率响应快,可靠性高等优点。它广泛用于武器装备,成型制造,模拟测试以及许多其他领域。
其他领域。除了对电动液压伺服系统的控制性能有更高的要求外,随着时代的发展和发展,对电动液压伺服系统的能效要求也越来越高。
工业技术的进一步发展。在参考文献[3]中,田中裕隆进行了变频电动机驱动定量泵系统,普通电动机驱动变量泵系统和变频电动机驱动变量泵系统的对比实验。得出的结论是第三种系统具有最高的能源效率。提出了利用负荷传感系统进行节能控制的方案 并证明了其稳定性。在参考文献[5]中,权龙提出了采用液压缸进出口独立控制的原理,使液压缸的背压保持低速运动,这种方法可以提高电动液压的效率。伺服系统。尽管将恒压变量泵与蓄能器相结合的供油方案在节能方面具有良好的性能,但其动态特性却不佳,蓄能器的存在占用了系统太多的空间。变频电动机定量泵系统的响应速度较慢,不能在低速下驱动较大的液压负载。因此,提出了一种高压交流伺服电动机驱动定量泵的供油方案。
本文的目的是在保证电液伺服系统控制性能的前提下提高节能性能。之间的液压泵的输出能量T1和T2中描述
如
(1)
其中E是液压泵的输出能量,P s是系统的供应压力,Q s是系统的供应流量。公式(1)表明,有两种节能方法,即降低供应压力和减少供应流量。
供给压力和负载力之间存在直接关系。为了获得负载力,可以在负载上安装压力传感器。但是,压力传感器价格昂贵且易碎,安装后可能会对负载移动产生影响。因此,可以使用系统变量代替压力传感器来观察负载力。作为观察者之一,ed状态观察员(ESO)由韩敬清首先提出。由于ESO可以用来观察系统的总扰动,因此可以将负载力视为扰动,而ESO可以用来估计扰动。然后,通过使用估计的负载力来设计安全阀控制器,以控制供应压力。
由于供应流量与负载位移有关,因此由于负载移动的滞后问题,有必要预测负载位移以向系统提供适当的流量。在参考文献[7]中,陈光荣提出了使用灰色预测法预测负荷位移的方法,取得了良好的预测效果。但是这种方法不能适应系统的变化,例如给定液压缸正弦运动轨迹的频率变化。因此,将自适应预测器设计为预测负载位移,然后使用预测的位移设计伺服电机控制器以控制供应流量。
本文将高压交流伺服电动机驱动的定量泵的节能控制系统分解为两个子系统。通过设计基于ESO的安全阀控制器和基于自适应预测器的伺服电机控制器,可以控制供应压力和供应流量以节省能源。
系统建模
高压交流伺服电机驱动定量泵的节能控制系统如图1所示。该系统以阀控缸系统为执行机构,主要由油箱,伺服电机,定量泵,比例溢流阀,伺服阀,液压缸和质量块。为了实现高压交流伺服电机对定量泵的控制,建立了系统模型。
图1:高压交流伺服电动机驱动定量泵的节能控制系统
高压交流伺服电机在驱动器的控制下具有良好的动态性能和稳态精度,其带宽远高于执行器的带宽。为方便分析,对模型的合理简化不影响分析。
[8] 整个系统的特点。因此,永磁交流伺服电机简化为一阶惯性系统:
(2)
其中Ntilde;是电机输出转速,ķ 米是电动机速度的增益系数,tau; 米是电动机时间常数和uuml; 米在电动机输入电压。
液压泵的理论输入扭矩计算为
Ť 我 = Delta; PV 我(3)
其中Delta; p是液压泵的吸入口和排出口之间的压力差,V 我是液压泵的理论位移。限定液压泵作为的机械效率eta; 米,则在液压泵轴的实际转矩
Ť = Ť 我 / eta; 米 (4)
将液压泵作为电动机的负载,电动机的输出速度为
Ntilde; = Ntilde; 0 - Delta; Ntilde; (5)
其中Ntilde; 0是额定电机转速和Delta; Ntilde;是造成其可以被描述为负载的电机的转速降
Delta; Ntilde; = KT(6)
其中k是电动机的负载系数。
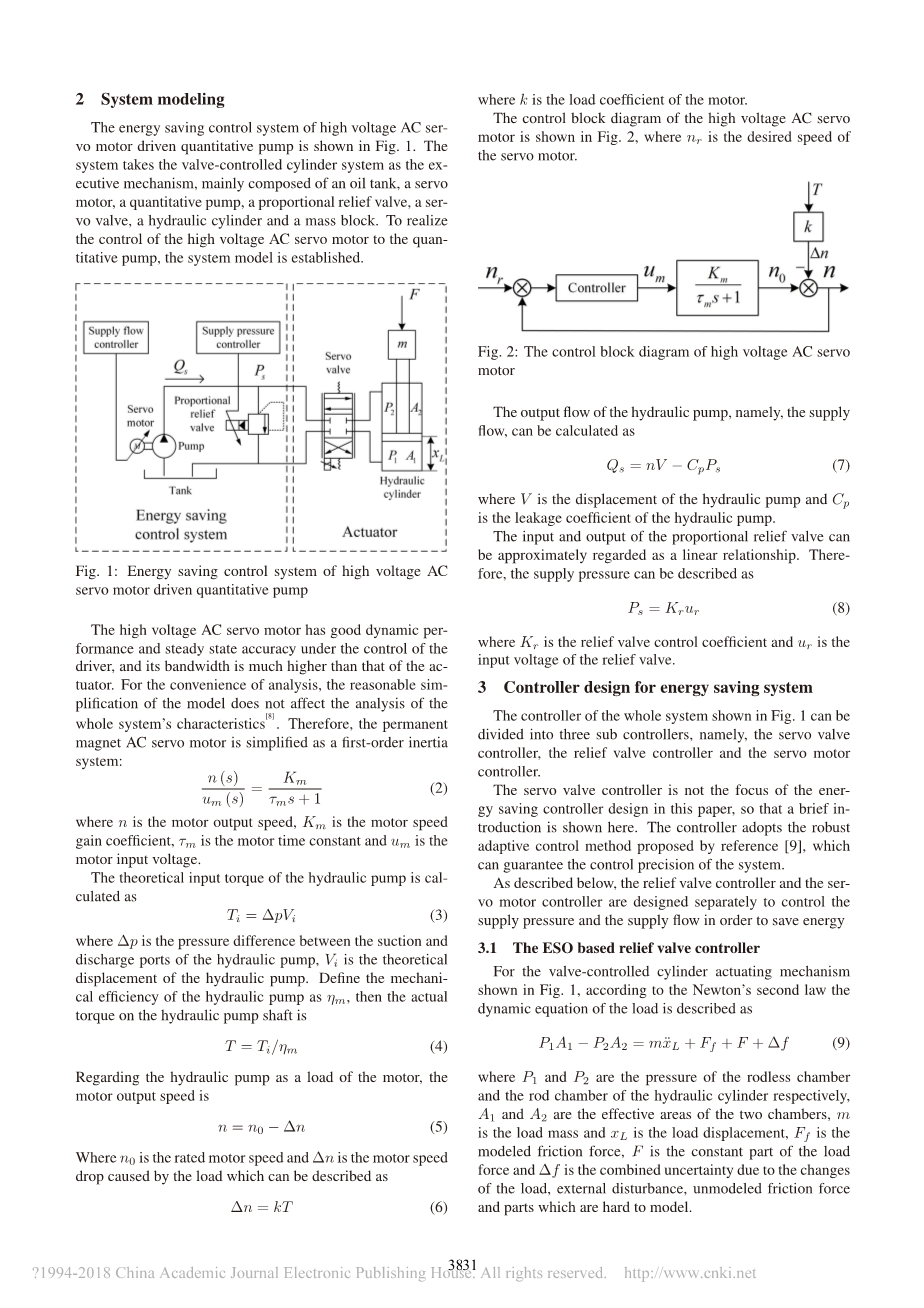
高压交流伺服电动机的控制框图如图2所示,其中n r是伺服电动机的期望速度。
图2:高压交流伺服电机的控制框图
液压泵的输出流量,即供应流量,可以计算为
Q s = nV minus; C p P s (7)
其中V是液压泵的排量,C p是液压泵的泄漏系数。
比例溢流阀的输入和输出可以近似视为线性关系。因此,供应压力可以描述为
P 小号 = ķ ř ugrave; - [R (8)
其中K r是安全阀控制系数,u r是安全阀的输入电压。
节能系统的控制器设计
图1所示的整个系统的控制器可以分为三个子控制器,即,伺服阀控制器,安全阀控制器和伺服电动机控制器。
伺服阀控制器不是本文中节能控制器设计的重点,因此这里简要介绍一下。控制器采用参考文献[9]提出的鲁棒自适应控制方法,可以保证系统的控制精度。
如下所述,安全阀控制器和伺服电机控制器是分开设计的,以控制供气压力和供气流量,从而节省能源
3.1 基于ESO的安全阀控制器
对于图1所示的气门控制气缸致动机构,根据牛顿第二定律,负载的动态方程描述为
P 1 阿1 - P 2 甲2 = MX uml; 大号 ˚F ˚F ˚F Delta; ˚F (9)
其中P 1和P 2分别是液压缸的无杆腔和杆腔的压力,A 1和A 2是两个腔的有效面积,m是负载质量,x L是负载位移,˚F ˚F是所建模的摩擦力,˚F是负载力的恒定部分和Delta; ˚F是组合不确定由于负载的这是难于模型的变化,外部干扰,未建模摩擦力和零件。
在等式(9)中所示的系统中,力˚F ˚F,˚F和Delta; ˚F可视为总的干扰力˚F d,其被描述为
˚F d = P 1 A1 - P 2 J2 - MX uml; = ˚F ˚F ˚F Delta; ˚F(10)
将系统的状态变量定义为x = [ x 1 x 2 ] T ,控制输入作为ugrave; = P 1A1 - P 2 J2中,控制输入增益,控制输出作为Ŷ = X 1,这是不确定的部分总扰动为f(x 1 ,x 2 ,t,w(t))= minus; m 1 f d。则等式(9)可描述为二阶系统
(11)
将总扰动扩展为新的状态变量
(12)
然后,将三阶系统推导为
⎧ X ˙ 1 = X 2
⎪⎪⎨ X ˙ 2 = BU X 3
(13)
X ˙ 3 = 克(X 1 ,X 2 ,T,W(吨))
⎪⎪⎩ yuml; = X 1
限定观察者的输出误差ε 1 = ž 1 - yuml;。然后将ESO设计为
(14)
其中ž 1,Ž 2和ž 3是所观察到的值X 1,X 2和X 3分别为beta; 01,beta; 02和beta; 03是ESO的三个可调增益参数,alpha; 1,alpha; 2和delta;是可调的滤波器参数。函数fal(e,alpha;,delta;)的特定形式描述为
在实际的控制系统中,为方便起见,使用了方程(14)的离散形式,显示为
(16)所观察到的负载力的估计值被示出为˚F d = ž 3。因此,供给压力为
P s = k f | ˚F d | k v | X ˙ 大号 | Delta;P s (17)
其中ķ ˚F和ķ v分别表示总的扰动的压力系数和速度系数,Delta; P 是被设置为一个较小的值,以保持足够的驱动力的供给压力裕量。通过选择合适的k f和k v值可以节省更多的能量,从而获
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[236941],资料为PDF文档或Word文档,PDF文档可免费转换为Word

