英语原文共 21 页,剩余内容已隐藏,支付完成后下载完整资料
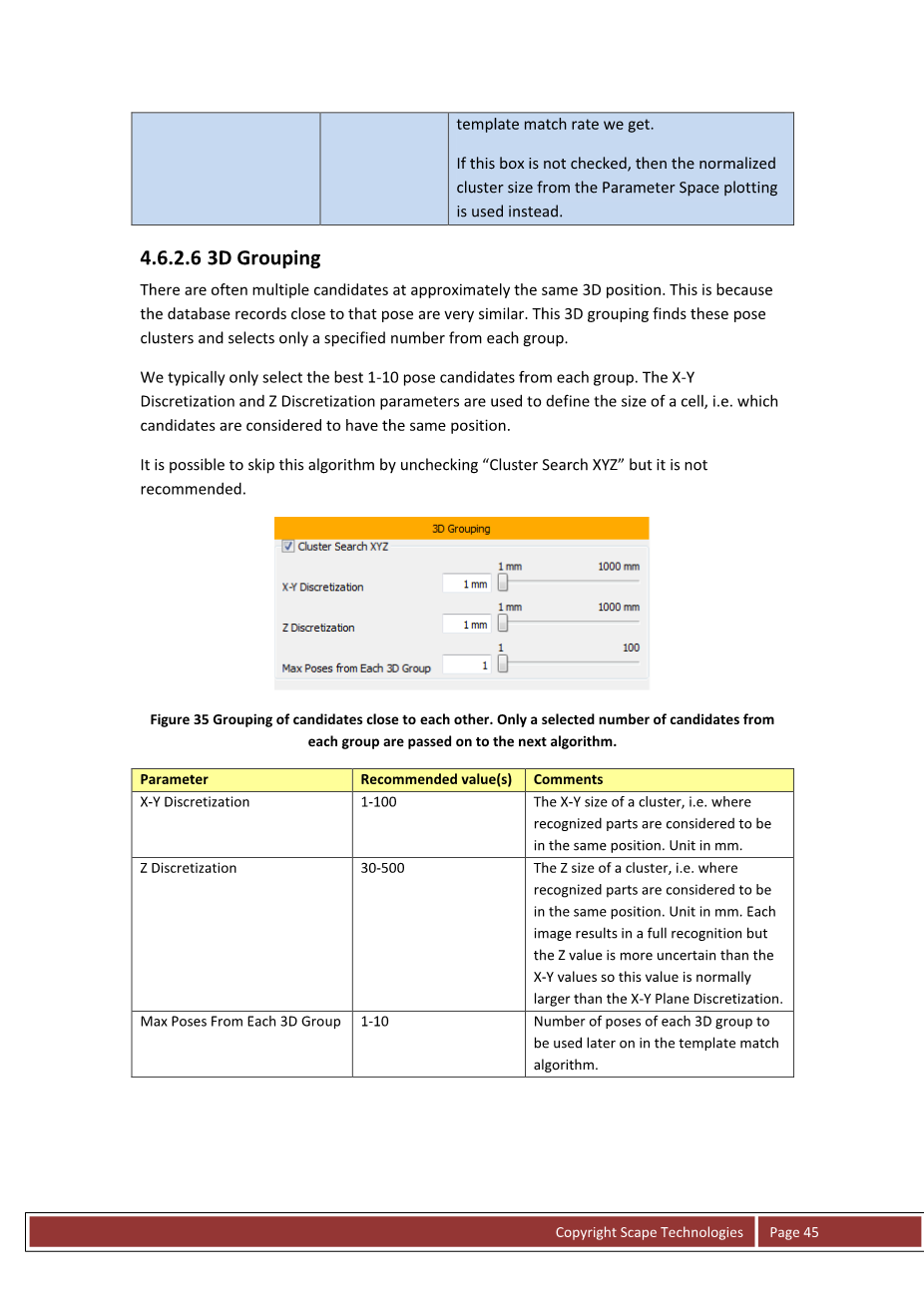
4.6.2.7 姿态优化
姿态优化是用于提取公认姿态最后的算法。从这一点上,对于每个姿态来说,我们在不同的姿态中完成一个接近建议姿态的模版授予匹配(目的在于于交互界面上显示一个识别评分)的目的,是为了修正姿态使姿态更合理。因为在6个维度上实验很浪费时间,我们不得不限制范围在3个平面姿态参数(x,y,z) 和关于Z轴的一个旋转变量。这种做法已经被认可。我们得到的分数最高的姿态将替代最初始的姿态。除非选择另一种如界面底部的图36所示的方法,否则,由此产生的姿态在识别得分的基础上重新排序。
图36 姿态优化设置
|
参数 |
推荐值(s) |
说明 |
|
专家型轮廓型 |
未经加工 |
用于模板匹配的真实图像的轮廓类型。这些轮廓类型用于匹配可以被选为可视化的“边缘”-可视化-窗口的部分的轮廓。 |
|
最大三维组 |
20 |
这项参数用于控制可能需要被优化姿态的集合的数值。如果模板匹配的时间太长,此值可降低至原来的5-10 。 |
|
旋转极限 |
5 |
旋转是一个关于z轴部分的旋转。这几乎相当于图像中的一部分的旋转。极限的范围[-限制,限制]。 |
|
旋转步长 |
1 |
这是在旋转极限范围内的步长 |
|
移动X-Y极限 |
5 |
在X-Y平面平移位移。极限集的范围[ X-Y极限;X-Y极限]。需要注意的是,我们在总是在XY两个维度中使用相同的极限。 |
|
移动X-Y的步长 |
1 |
这是在X-Y极限范围内的步长 |
|
移动Z极限 |
5 |
在Z平面的平移位移。极限集的范围[ -Z极限;Z极限]。Z相当于一个比X-Y位移更不确定的方向,所以这项数值比X-Y平面的数值更大。 |
|
移动Z步长 |
1 |
这是在Z极限范围内的步长 |
|
最小识别评分 |
70 |
很难提前说什么是一个很好的限制模板率。运行识别的力偶来找到合理的数值。将这项数值设置的足够高来证明错误的识别是很重要的。 |
|
排序方法 |
识别部分的默认排序是在识别得分的基础上得到的。其他选项是“高度”或“选择模式优先级”。基于高度进行排序是一个不错的选择。当这个选项(或选模式优先权)被选中时,一个滑块将显示在下面。这个滑块将会显示出以下数值:这部分显示识别评分gt; =(1 –高度评分)*(最大识别评分- 最小显示评分) 最小显示评分将高度的排序(或选择模式优先级)以顶部第一。提示:尽量从“识别分数”开始设置它的默认参数,并且使它只在你有合理的识别结果时候启动。 |
要被改善的姿态的最大的总数是“最大的三维群体”times;“最大构成从每个三维组”,这项数值被设定在三维分组盒内。
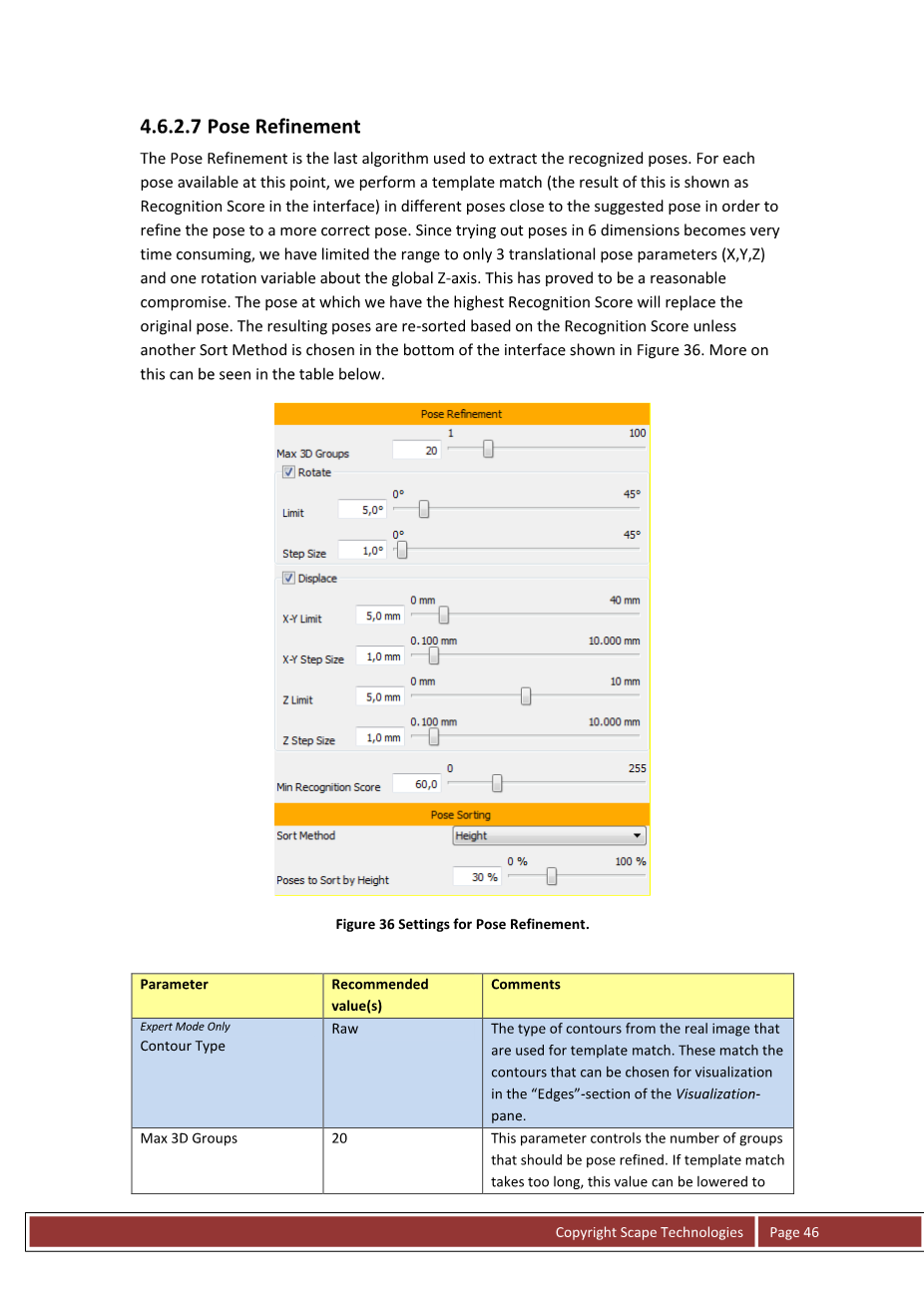
4.7调整三维传感器的识别设置
调整实际的三维数据的设置的设置包括:“调整真实的特征提取设置”和“调整识别设置”.尽管在训练虚拟深度地图和识别真实深度图的这段时间内使用的是相同的特征,但是有时特征提取设置是不同的。真正的深度图引入更多的噪声,丢失的数据,并且它们包含重叠的部分。这意味着,一些公差需要更放松;例如,我们可以允许在一个3x3邻域中心点有一个或多个缺失点,然后我们依旧将它视为一个光滑的表面来进行计算。
4.7.1调整真实的特征提取设置
应用于真实数据的点云分析设置,可以在图37中看到。
图37 真实数据的点阵分析设置
以下是一种推荐值的说明:
|
参数 |
推荐值 |
说明 |
|
专家型 方形贴片宽度 |
3x3 |
在深度图中用于确定有正常点的区域的大小。其数值应与训练时相同 |
|
最大丢失点 |
0-2 |
只有在3x3范围发现正常点才实现。决定在3x3的区域内可能会被丢失的点的数量。更多的丢失点意味着定义不良的标准。通常,它可能需要设置为1,使对象具有很小的光滑的表面,而不是默认的0。 |
|
最大均方根误差 |
1.00 |
最大均方根误差能够创造一个特征。在NxN区域内的最大均方根误差来自于一个平面的点,这个平面中心的点被视为一个光滑的表面并且提高。 |
|
最大正态 |
90度 |
一个NxN区域的标准态和载体的虚拟传感器的针洞的之间的最大角度。因为在60-90的角度内,大部分的表面无论如何都不能被物理扫描仪检测到,所以,为了减少来自于内容的深度图的特征,该值可以降低, |
|
扫描和数据之间的最小角度 |
16~20度 |
滑动扫描的具体设置。通常情况下,当图像被激光线检测错误时,将会导致向上延伸到主动式激光和3D摄像机“面”的三维点。使用此设置,当他们不能从一开始就被扫描时,这些表面将会被直接移除,这意味着他们一定来自于虚假的三维点 。更高的值将会删除更多的点 |
|
移除异常值 |
检查 |
即便是物理扫描仪没有给出许多异常值,总是移除它们还是很明智的。 |
|
异常值移除设定 |
不改变 |
这项设定仅仅是为了熟练者控制异常值的移除,没有必要改变这些默认设置。 |
|
最小强度差 |
1-3 |
网格扫描的具体设置。在一个点的模糊的版本的中心和像素2的最小强度差的像素需要被当作一个点来计数。将该值设置太高或太低会导致来自网格扫描仪三维点数量减少。 |
|
仅用二进制保存点 |
检查 |
滑动扫描的具体设置。一个点阵可能包含不属于二进制并且能够妨碍识别的数据。这可能是由于异常值远远超出本的最大值或者可能是由于滑动扫描也扫描了二进制旁边的数据。为了移除这些点在识别中的影响,这些点可以被这项设置滤除。 |
|
二进制两侧极限 |
50mm |
滑动扫描的具体设置。这项极限是用来移除二进制侧边之外的点。 |
|
二进制底部极限 |
30mm |
滑动扫描的具体设置。这项极限是用来移除在二进制底部之下的点。 |
|
二进制顶部极限 |
50mm |
滑动扫描的具体设置。这项极限是用来移除在二进制顶部之上的点。 |
上面这些点阵分析的设置,有一个特征设置能够调整“简单模式”。这在图38中可以看出。
图38 真实数据功能设置
以下是一种推荐值的说明:
|
参数 |
推荐值 |
说明 |
|
最小角度正常和矢量之间的针孔 |
5-10度 |
若角度低于这个值,该点将不被允许产生一个特征。阻止这些点产生特征的原因是他们很可能不会决定给正确的部分。更多关于此文章的第51页。 |
|
稀释因子 |
1-10 |
这个设置可以用于稀释识别特征。最好的识别结果,这应该是保持在一个值1但如果识别速度是一个问题,这个值可以增加降低参数空间绘制时间。记录下最小簇尺寸。这个设置只影响参数空间绘制并不影响在使用所有3D点之后形成的姿态优化。 |
4.7.2 调整识别设置
现在,我们看看在进行特征提取之后进行运算所得到的相关的3D识别:
1.在数据库的特征和真实图像的特征之间的特征比较
2.投票空间绘图和集簇搜索
3.错误的高度的部分(基于选择区管理)的高过滤将被移除
4.为了估计匹配率(可选)的模版匹配
5.3D结果分簇(第一次)3D分组
6.为了估计姿态匹配质量(可选)姿态优化
7. 3D分组(最后一次)
最后一项是执行使用从每个聚类法得到的最好的结果。所以这个项目没有设置。
3D识别算法结果的第一步和第二步以深度图中部分候选认可为结果的。此后,移除清单中的候选部分或者试图提高他们知道仅有少数的可被识别的部分作为结尾。
上述项目由他自己的3D识别标签。现在我们将简要概述每项。
4.7.2.1 特征比较
识别的第一步是比较实际深度图特征和培训数据库的虚拟特征。能够调整算法部分的设置如下图39所示。
图39特征比较设置
|
参数 |
推荐值 |
说明 |
|
最大角度偏差 |
5-10度 |
最大角度介于一个训练的标准值和一个识别特征,这个识别特征对于它们来说是用来匹配和部分表决的。该值取决于训练的离散点的法线构成以及点的正常值的预期的变化。如果参数空间绘制速度太慢,这个值会更低。 |
4.7.2.2表决空间
表决空间是与SCAPE的特征,即SCAPE的识别核心,相结合的。图40显示的参数调整。
图40 表决空间的3D传感器设定
以下是一种推荐值的说明:
|
参数 |
推荐值 |
说明 |
|
在深度图的像素离散 |
2 |
姿态能够被要求到多准确,可以通过个体的特征被表决出来。这项数值通常和个体的3D点的变化以及这部分的大小,也和训练角度的离散程度相关联。 |
|
滚动离散化 |
20-40度 |
个体特征的外部角度的准确度能够被估计出来。5由于标准特征直接指向深度图的针孔,将会是360度,然而这将可能在标准的光滑表面上低于5度远非指向深度地图的针孔。 |
5区域点3D特征的外部角是2D角,该2D角是介于在图片投影之后的特征的3D标准和图片平面的X轴的。
|
距离离散 |
3-10mm |
被用于准确估计深度。此值将取决于训练角度的离散化和零件的尺寸以及扫描仪的深度精度。集群将被允许在这个数值的3倍的间隔。 |
|
最小的簇大小 |
5-100 |
特征的最小数值需要被表决为一个具体的姿态(超出公差)因为他将被作为一个有效的姿态被计数。在从超出公差的部分的某个角度观察时,这项数值主要取决于这部分光滑表面的大小。 |
|
每项记录的最大集群 |
50-200 |
来源于每次单个训练记录能够被允许接受的姿态的最小数量。这项数值设置的比100低能够完成速度优化,并且,对于所有应该被识别的部分来 剩余内容已隐藏,支付完成后下载完整资料 资料编号:[146404],资料为PDF文档或Word文档,PDF文档可免费转换为Word |

