英语原文共 5 页
一种基于四元数,使用惯性测量单元的手持设备的倾斜角度校正方法
摘要
基于陀螺仪的定向传感器由于集成步骤的原因会产生定向漂移,而三轴加速度计不需要任何积分步骤来计算倾斜角度,并且计算的倾斜角度不随时间漂移。但是如果使用三轴加速度计来测量倾斜角度,传感器应处于无加速状态。本文提出了一种专业系统来识别惯性测量单元(IMU)的静止状态。卡尔曼滤波器旨在降低传感器的噪声,使专业系统更加可靠。为了验证倾斜角校正方法,我们进行了两种不同的测试:静态和动态。当IMU保持静止30秒时,偏航角一直保持在0°且几乎没有观察到角度误差,而滚转和俯仰角来自加速度计测量出的加速度。动态测试时,我们移动IMU然后返回到原始方向,滚动角和俯仰角几乎完全校正,但偏航角没有显着改善。
1 引言
传统上,IMU已用于惯性导航系统,但微机电系统(MEMS)IMU的开发开辟了新的应用,如人体运动研究[1] - [3],方向传感器[4], 和制造[5]。 基于IMU的陀螺仪可用于计算方向,但由于陀螺误差(例如随机行走和噪声)的积分,方位计算随时间漂移。 为了减少定向误差,文献[6] - [12]报道了使用三轴加速度计作为测斜仪的各种校正方法。
当传感器不加速运动时,三轴加速度计测量相对于传感器框架的重力矢量。 与陀螺仪计算的方法不同,由于其角度计算不需要任何积分步骤,三轴加速度计测量的倾斜角度不随时间漂移。 尽管有这样的优点,但三轴加速度计仅用于帮助陀螺仪校正物体的方向,因为加速度计无法测量偏航(航向)方向。在[6]中证明了如何通过乘以基于加速度测量计算的校正角速度来校正倾斜角。
当传感器静止时,这种方法可以测得更好的结果,但仍然会出现一些漂移误差。在[7,8]中使用了卡尔曼滤波技术来组合三轴加速度计的倾斜角度测量值和陀螺仪的方向测量值。 此外,在[9]中提出了混合卡尔曼滤波器。 当机器人加速时,该方法使用一个卡尔曼滤波器估算陀螺仪的方向,而当机器人不加速时,使用另一个卡尔曼滤波器通过包括三个加速度计来估算方向。
为了使用三轴加速度计作为倾斜传感器,我们必须通过IMU测量来识别无加速状态。 于是开发了一种模糊算法,即通过加速度计和陀螺仪检测传感器的准静态状态[10]。 在[11]中,选择模糊专业系统来识别车辆是否从加速度计信号静止。 当车辆的每个轴中的冲击低时,系统假定车辆静止并校正车辆的方向和速度。 在[12]中,介绍了应用基于规则的模糊逻辑来估计车辆的动态的方法。根据车辆的动态状态,选择不同的传感器来估算方向。
本文提出了一种基于四元数定向表示特性的手持装置倾角校正方法。 该方法使用三轴业速度计来测量IMU静止时IMU的倾斜角度,并根据倾斜角度来校正四元数项。实验采用专业系统来识别IMU是否静止。 当传感器静止时,角速度设置为零来防止进一步的漂移并校正倾斜角度。 本文给出了实验结果,验证了该方法的有效性。
2 方向计算
方向余弦矩阵由三个单位矢量组成,这三个单位矢量表示投影到三个参考轴上的三个体轴,这些矢量形成三列方向余弦矩阵。 从主体框架到参考框架的矩阵描述如下:
(1)
其中下标,和是参考帧(r)的正交单位矢量,而,和是IMU主体帧(b)的相应矢量。为了使用方向余弦矩阵旋转3D矢量(),它遵循:
(2)
其中矢量v#39;是旋转的3D矢量。
欧拉姿态表示易于理解,但需要预定的序列来找到旋转矩阵。由于不同的旋转序列导致不同的旋转矩阵,因此定向误差会随时间累积。
另外,欧拉姿态表示在某些角度存在奇点问题;因此,欧拉角表示的应用有一定限制,并且不适用于精确的3D定向应用。而四元数姿态表示获得围绕一个轴旋转一个旋转矩阵,并且没有奇点问题。四元数由一个实数和三个虚数组成:
(3)
其中,,和是实数。旋转3D矢量,将矢量乘以四元数和四元数的共轭,如下所示:
(4)
从(2)和(4),以四元数项从体框到固定框的方向余弦矩阵变为
(5)
当使用单位四元数时,(3)应满足:
(6)
因此(3)可以写成:
(7)
其中是3D单位向量()。 然后,当通过使用(4)将矢量旋转角度时,的四元数分量变为
,,,
四元数相对于时间的微分方程具有以下矩阵形式:
(8)
然后,旋转后的四元数项是:
(9)
其中 、是第k项的四元数,Delta;t是采样时间。
3 定向校正方法
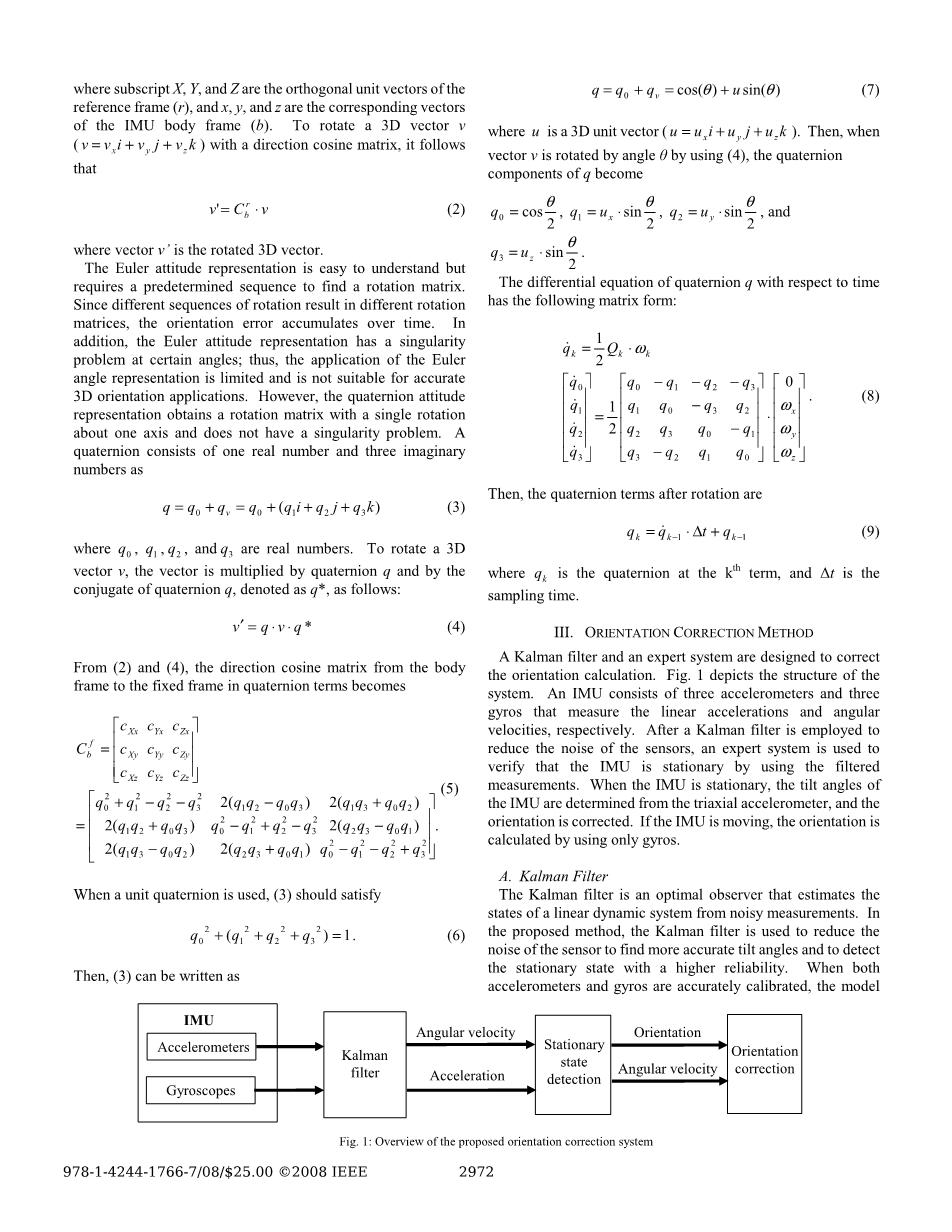
设计卡尔曼滤波器和专业系统来校正方向计算。 图1描绘了系统的结构。IMU由三个加速度计和三个陀螺仪组成,分别测量线性加速度和角速度。 在采用卡尔曼滤波器来降低传感器的噪声之后,使用专业系统通过使用滤波的测量来验证IMU是静止的。 当IMU静止时,从三轴加速度计确定IMU的倾斜角度,并校正方向。 如果IMU正在移动,则仅使用陀螺仪计算方向。
IMU
Orientation
Angular velocity
Stationnary
State
detection
Kalman
filter
Orientation
correction
Accelerometer
Acceleration
Angular velocity
Gyroscopes
图1 提出的方位校正系统概述
3.1 卡尔曼滤波器
卡尔曼滤波器是一种最佳观测器,可根据噪声测量结果估算线性动态系统的状态。 在所提出的方法中,卡尔曼滤波器用于降低传感器的噪声以找到更准确的倾斜角度并且以更高的可靠性检测静止状态。
当精确校准加速度计和陀螺仪时,离散时域中IMU系统的模型变为
其中是时刻的状态,是时刻的系统噪声,是时刻的测量值,是kt的测量噪声。
图2示出了当传感器静止时有和没有卡尔曼滤波器的加速度结果的比较。 由于卡尔曼滤波器的加速度具有低得多的噪声,因此合成的倾斜角具有较小的噪声,并且专业系统可以以更高的可靠性识别静止状态。
图2 不同系统的加速比较
(a)没有卡尔曼滤波器,(b)没有卡尔曼滤波器
3.2 固定状态检测
当IMU静止时,用三轴加速度计测量倾斜角。为了识别这种状态,动态状态与IMU测量有关。当IMU静止时,角速度为零,每个轴的加速度是恒定的,并且加速度的大小等于重力矢量的大小。然而,由于陀螺仪具有随机行走特性和噪声,因此角速度测量值通常不为零。另外,加速度测量值包含噪声,并且由于加速度计的非线性特性,由于重力引起的加速度测量值的大小根据倾斜角度而变化。为了从这些不准确的测量中识别静止状态,通过使用加速度估计,角速度估计和加速度波动来结合专业系统。专业系统由“If A,then C”形式的规则组成,其中A是一组前因,C是一组结论。当A满足时,C为真。
让无重力加速度(Acc)和角速度(Ang_vel)的大小表示为
(12)
(13)
其中,和是滤波后每个轴方向的加速度测量值,是重力矢量的大小,,和是滤波后每个轴的角速度测量值。
当IMU静止时,每个轴的加速度应该是常数。 因此,每个轴上的加速度测量值的波动应该小于来自卡尔曼滤波器的最大加速度噪声。 加速度波动()定义为
(14)
平均加速度表示为
其中n是加速度样本的数量。 当IMU静止时,n增加以获得更稳定的平均加速度。
当IMU静止时,无重力加速度(Acc)应低于加速度计的最大误差,其包括非线性误差和滤波后的最大噪声。 另外,角速度(Ang_vel)的大小应该低于包括随机游走的陀螺仪的最大误差和滤波后的最大噪声。 如果IMU由人移动,则不可能在每个轴上以恒定加速度移动1秒并且几乎具有零角速度。 因此,当满足以下条件时,IMU被假定为静止:
规则1:
如果
且
且
对于最后1秒的数据,那么IMU是静止的,否则IMU正在移动。
其中是每个轴的最大加速度误差,是每个轴的最大角速度误差,是滤波后每个轴的最大加速度误差。
当IMU静止时,三个加速度计测量倾斜角度,即重力矢量和IMU车身轴线之间的角度。 应建立倾斜角度与方向余弦矩阵之间的关系以校正倾斜角度。 当参考帧的Z轴被选择为在重力矢量的相反方向上时,来自(1)的方向余弦矩阵的倾斜角分量是,和。 可以通过归一化三个加速度分量来导出倾斜角分量。 为了减小加速度测量噪声,使用平均值代替瞬时加速度来计算倾斜角度。 根据每个轴的平均加速度的倾斜角分量变为
从(5)开始,倾角中的四元数项为
由(6)和(17)知,有四个方程和四个未知数,但由于方程是非线性形式,因此不能解析地求解方程。 要查找四个四元数项,其中一个是固定的,其他三个项已得到纠正。由(19)和(6)我们可得到
当被固定时,来自(17),(18)和(20)的校正后的四元数项成为
其中0 _ cor _ 0 q,1_ cor _ 0 q,2 _ cor _ 0 q和3 _ cor _ 0 q是更正的四元数项。式。 (22)和(23)应在(20)和(21)计算后计算,因为(22)和(23)使用了修正项。 由于四元数具有四个分量,因此评估四种校正可能性。 校正的项被馈送到(20)并且不满足(20)的校正的项被丢弃。 从所有可能的四元数校正中,选择具有最小均方根误差(RMSE)的校正作为最佳校正可能性。 为防止进一步的方向漂移,当IMU静止时,角速度设定为零。 因此,当IMU静止时,它遵循:
规则2:
如果IMU静止,那么,,,且校正四元数项并使
否则采样时间。
4 实验
使用MEMS IMU(MDIMU-I-221-777,Mechworks Systems)测试所提出的取向估计方法。 IMU由两个2g加速度计,一个10g加速度计和三个75°/秒陀螺仪组成。 方向校正方法在两个条件下进行测试:静态和动态。
首先,IMU在水平面上静止30秒,并且如图3所示计算方向。图3(a)显示了来自陀螺仪的角速度的方向计算,图3(图3)。 图3(b)示出了通过倾斜角校正方法的取向计算。 图3(a)显示了方向随时间漂移。 使用此方法,参考帧与初始正文帧匹配。 图3(b)示出了方向仅在前1秒内缓慢漂移。 在1秒时,专业系统断定IMU是静止的并且根据重力矢量计算滚转角和俯仰角。
图3 IMU静止时的方向计算
(a)采用校正方法,(b)采用校正方法。
由于在该方法中参考系的Z轴平行于重力矢量,因此相对于1秒的加速度计测量值校正滚动角和俯仰角。 1秒后,滚转角和俯仰角在接下来的5秒内表现出非常小的波动,但随着更多的加速度数据用于平均加速度计算,观察到更稳定的倾斜角。 然而,偏航角在1秒后根本不会波动,因为所有三个方向上的角速度都设定为零,并且偏航角不受重力矢量的影响。
对于第二次测试,IMU水平放置并以随机连续运动旋转30秒,60秒和90秒,然后返回到原始方向。 表1总结了有和没有倾斜角校正方法的定向误差的结果。
表1 有无倾斜角校正方法的定向误差测量结果
结果表明,当实施倾斜角校正系统时,滚动和俯仰方向上的误差几乎为零。 然而,由于沿重力矢量的旋转角度具有相同的倾斜角度,因此不能消除与重力矢量平行的偏航方向上的误差。 滚动和俯仰角度存在小误差,但可能是实验误差。 表1的测试2的取向如图4所示。在该图中,由于所提出的倾斜角校正方法,在65秒处的侧倾和偏转角的突然角度变化。
图4 表I中测试2的方向输出
5 结论
本文提出了一种基于四元数姿态表示计算的倾角校正方法。 开发卡尔曼滤波器以降低IMU的噪声,以实现更高的倾斜角精度并提高专业系统的可靠性。 IMU的稳定状态与IMU的输出相关,以识别IMU是否静止。 如果是,则校正方法基于加速度测量值计算IMU的倾斜角度。 为测试所提出的方法,进行了静态和动态测试实验。
第一个实验结果表明,该方法可以识别静止状态并校正倾角误差。 当IMU静止时,偏航角不改变,而侧倾和俯仰角值相对于平均加速度值改变。 对于第二个实验,IMU移动然后返回其原始方向。 倾斜角度被精确校正,但是偏航角度与所提出的倾斜角度校正方法没有显着改善。
参考文献
[1] T. Liu, Y. Inoue, K. Shibata, and X. Tang, “A Wearable Inertial Sensor System for Human Motion Analysis,” in Proceedings 2005 IEEE International Sympo

