英语原文共 6 页
第十届全球智能控制与自动化大会会议录
中国北京,2012年7月6日至8日
用PID算法建立自动循迹小车
Fu-hua Jen和Bao Trung Mai
台湾省30401新竹县新丰乡明新科技大学精密机电工程研究所
alanjen@must.edu.tw
摘要:
这项研究描述了使用PID算法设计自动循迹小车。这个寻迹小车将在一个领域的固定路线上运行。它能够在第一次运行时测试该字段然后以尽可能快的速度进行另一次运行。PID算法就是为此目的而设计的。这个算法通过来自红外传感器的反馈信号纠正在轨道上的循迹小车的位置。 这可以使小车达到每秒157厘米的速度。集成的PID模块允许调整三个PID增益,以在测试运行期间获得更好的性能。测量和计算模块存储路径字段的每个传递部分的配置文件。它包括标记和曲率半径之间的距离。经过分析,主微处理器将为每个部分提供操作细节。这个循迹小车将在直线上加速并在改变方向时降低速度。
索引术语 - 循迹小车,PID算法,红外传感器。
I.介绍
自动寻迹小车是一种可以沿着路径行进的自操作设备。通常路径由白色表面上的黑线组成(或者可能与此相反)。 它应该是可见的,以允许循迹小车用传感器检测。许多工作已经完成[1-6]。 自动循迹小车的主要问题是当转向小圆圈或角落时它很容易脱离轨道。此外,即使我们保持两个车轮的速度相同,许多循迹小车也不能直线行驶。通常,现实的系统是非线性的,高度复杂的或者难以精确建模。这就是为什么模型控制器系统是这项工作所必需的。 因此我们想引入PID控制器[7-14]。内置的PID算法控制器系统用于提高循迹小车的响应能力。它可以使用反馈机制不断纠正错误的运动。因此,形成一个简单而有效的闭环系统。控制器系统中有三个微芯片在一起同时工作。他们可以根据时间的变化优化性能,以便像人类一样可以获得更接近的行为。
本研究试图应用和发展一些理论来控制跟随线的循迹小车(该线由19mm宽的连续黑/白线制成)。首先,循迹小车推出了一个红外传感器。后来,传感器的数量有所改善。它应该给出比较,当速度可以允许显着增加时,它们具有非常不同的结果。此外,还对使用两种类型的红外传感器进行了分析; 一个是数字输入信号,另一个是模拟输入信号。问题是哪一个更好。分析描述了不同类型输入信号的不同影响,每种输入信号的优缺点。关于如何布置传感器的讨论对于详细检测线的中心是必要的。
PID算法应用于微控制器。 PID控制器的不同增益设置提供不同的机器人动作效果。通过软件调整PID的方法有望获得更好的性能。通过软件调整PID的方法有望获得更好的性能。这就是为比赛和教育建立一个表现循迹小车的想法。
本研究中开发的算法已应用,即使仅针对第一个版本也取得了良好的效果。 由于循迹小车的内置控制器中的许多可用功能,它也成为学生的便利设备。学生只需调用可用的功能来设置PID进程或更改控制器系统的参数,而无需编写功能的详细程序。我们在这里所做的工作得到了正确和认真的验证。
II.控制方法
通过整个活动,追寻路线是自动循迹小车的目的。因此,控制方法是本研究中最重要的部分。
预计自动循迹小车将从起始标记开始,然后沿着轨迹线以最短的时间在停止标记处结束。比赛的规定将不允许任何线路追踪小车错过路线的任何曲线或采取捷径。有一些技术可以帮助自动线追踪小车区分地面和轨道路线之间的区别。 许多传感器都可以使用; 如相机,颜色传感器,甚至是使硬件更复杂的激光传感器。在这种情况下,高速捕获轨道路线的能力是必要的。来自传感器的数据也应该尽可能简单。因此,红外传感器被推广用于这项工作。 利用数字和模拟输入信号描述了使用红外传感器来控制循迹小车的技术。
A.用数字传感器校正线位的技术
一个红外传感器可以帮助路线跟踪车知道它是否在路线上或者不在路线上。循迹小车必须根据轨道线和机器人之间的相对位置来知道。通过这种方式,许多红外传感器的组合有望获得高性能。可能存在一些问题:我们需要多少个传感器?如何安排它们以获得更好的性能?我们通过以下案例进行了一些调查。
案例一:一个数字红外传感器
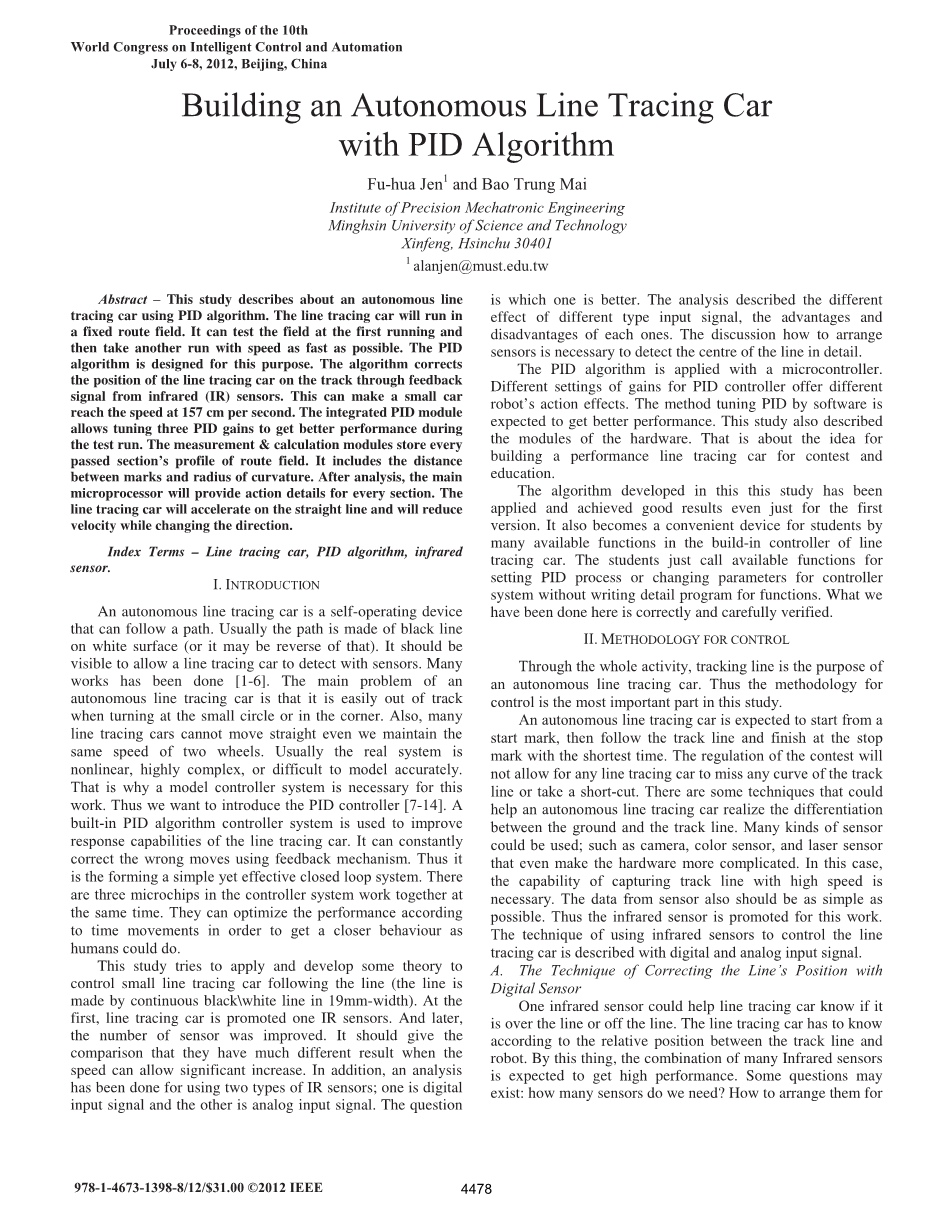
反馈信号只有两种状态:“1”表示线路上的传感器,“0”表示不在线路上。 它符合传感器从黑色地面到白色线的移动。在这种情况下,路线追踪小车只能跟随直线的一个边缘并以锯齿形式移动。
在图1中,当循迹小车向右转时,它将越过线的左边缘然后它应该向左转回到线的左侧。由于许多原因,传感器后来连续穿过第二个边缘,但现在循迹小车已停留在线的右侧。 它继续再次向右转。在这种情况下,循迹小车失去路线并转向,直到传感器接触到一条边。这个问题确实发生在配备一个数字红外传感器的示踪剂上。这可能不会产生良好的结果。 让我们看看这个问题是如何解决的。
图1带有一个数字红外传感器跟踪路线
案例二:两个数字红外传感器
人们期望带有两个数字红外传感器的线路追踪小车应该能够更好地工作。它现在的新任务不是追随一个边缘。 控制器必须调整两个轮子,以便在移动过程中轨道线始终保持在两个传感器内。输入信号被转换为二进制,如:(00),(01)和(10),如图2(a)所示。
在图2(a)中,两个邻近传感器之间的距离长于轨道线的宽度。线路跟踪小车和轨道线之间有三个不同的位置,但它们产生相同的传感器状态(00)。因此,线路追踪小车在丢失线路或跨越线路时无法区分(见表1)。 在图2(b)中,两个传感器设计得更接近线的中心。两个传感器可以同时在线上。现在的问题可以解决,因为结果如表2所示,它几乎没有变化。
现在在线的跨界情况改为(11)。 它与丢失线(00)有很大不同。因此,线追踪车现在可以区分这些左/右或跨线失线的情况。在右侧失去线之前,传感器信号应为(10)。如图2(b)和表2所示,在左侧失去线之前应该是(01)。这是在左侧或右侧追踪丢失线时的标志。“转向”变量用作输入控制信号。它的值描述了线路追踪车应该转多少。通过添加更多传感器,线追踪车可以具有更好的性能,因为“转向”的值增加。此外,传感器位置的正确布局也提供了更多的有效性。
图2(a)(b)带有两个数字红外传感器的跟踪线
表格1
符合图1的命令。图2(a)
|
传感器 |
反应 |
|
00 |
取决于情况 |
|
01 |
右转 |
|
10 |
左转 |
表格2
符合图1的命令。图2(b)
|
传感器 |
操舵 |
反应 |
|
00 |
2/-2 |
左转/右转 |
|
10 |
1 |
左转 |
|
11 |
0 |
直行 |
|
01 |
-1 |
右转 |
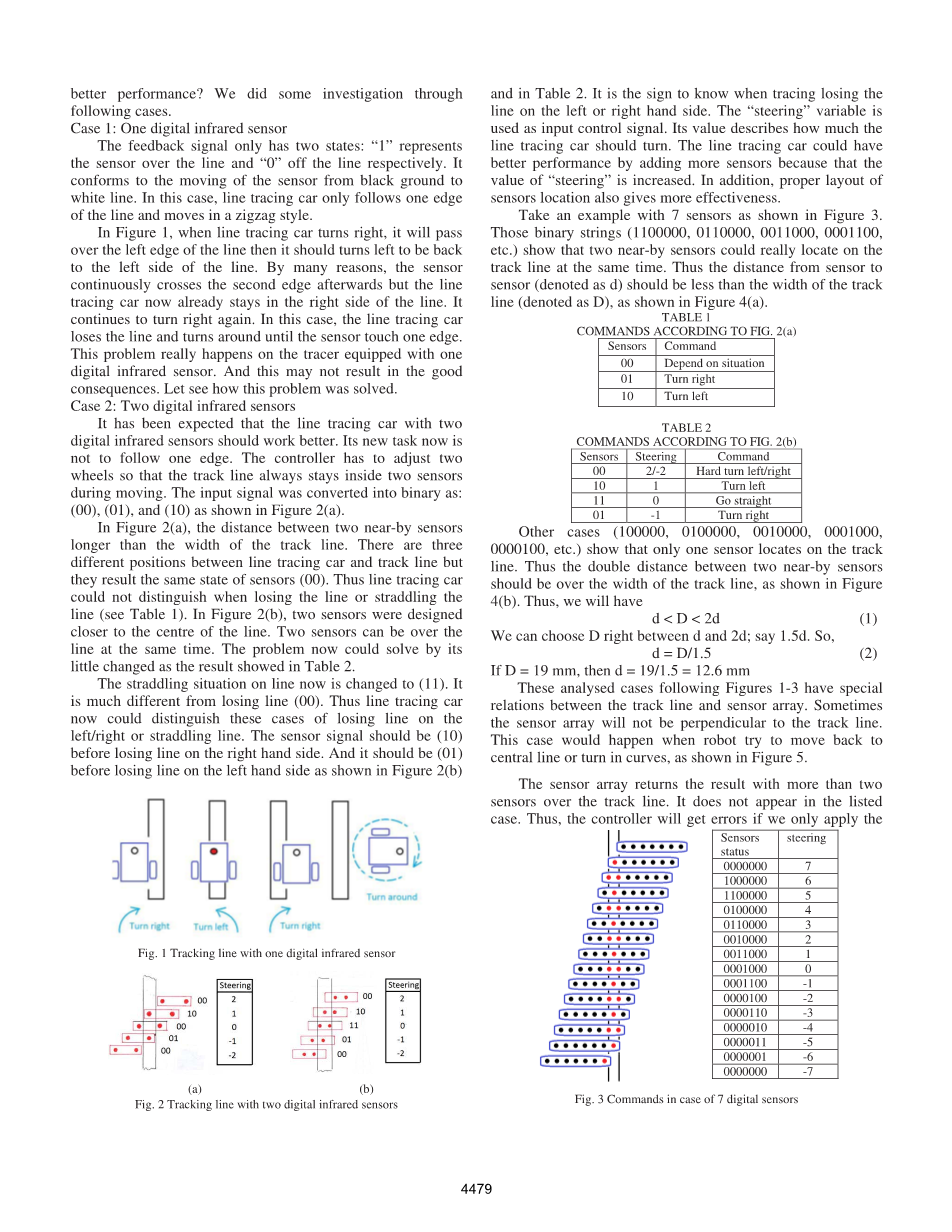
以7个传感器为例,如图3所示。这些二进制字符串(1100000,0110000,12100000,0001100等)表明两个附近的传感器可以同时真正位于轨道线上。因此,传感器到传感器的距离(表示为d)应小于轨道线的宽度(表示为D),如图4(a)所示。
其他情况(100000,0100000,0010000,0001000,0000100等)表明只有一个传感器位于轨道线上。因此,两个附近传感器之间的双倍距离应该超过轨道线的宽度,如图4(b)所示。因此,我们有d lt;D lt;2d(1)。我们可以在d和2d之间选择D; 说1.5d。 那么,d = D / 1.5(2)如果D = 19mm,则d = 19 / 1.5 = 12.6mm。
图1-3之后的这些分析情况在轨道线和传感器阵列之间具有特殊关系。有时传感器阵列不会垂直于轨迹线。当机器人试图移回中心线或转弯时会发生这种情况,如图5所示。
|
传感器状态 |
操舵 |
|
0000000 |
7 |
|
1000000 |
6 |
|
1100000 |
5 |
|
0100000 |
4 |
|
0110000 |
3 |
|
0010000 |
2 |
|
0011000 |
1 |
|
0001000 |
0 |
|
0001100 |
-1 |
|
0000100 |
-2 |
|
0000110 |
-3 |
|
0000010 |
-4 |
|
0000011 |
-5 |
|
0000001 |
-6 |
|
0000000 |
-7 |
图3 7个数字传感器的命令
(a)线路上的两个传感器,d lt;D (b)线路上的一个传感器,2dgt; D
图4两个邻近的传感器和轨道线的宽度之间的距离的条件
传感器状态:0011110;0011100
图5机器人在小曲线半径转弯时的情况
传感器阵列通过轨道线上的两个以上的传感器返回结果。 它没有出现在列出的案例中。因此,如果我们仅在上述情况下应用分析,则控制器将出错。解决此问题的一种简单方法是让控制器处于被动状态。当传感器阵列返回不同的结果时,它将发出命令。 然而,这就像程序员的懒惰习惯。不推荐使用这种方式,因为线路跟踪小车在转入小半径的曲线时比以往更需要命令。在这种情况下,我们真的可以在分析中添加更多案例来制作移动的细节。这个问题真的可以解决了。显示了一种更好的方法,但它是为模拟传感器阵列设计的。它将在下一节中显示。
B.利用模拟传感器校正线路位置的技术
基本上,为了获得变量“转向”值的细节,我们必须最小化数字传感器之间的距离并增加传感器的数量。
然而,线追踪车的尺寸不能保持小尺寸。 因此,模拟传感器用于解决该问题。
传感器校准
大部分的传感器的灵敏度都是不均匀的。因此,即使在相同的光源下,所接收的数据也可能改变。在这种情况下,需要校准传感器。我们现在需要做的是将传感器的值映射到整数范围0~100,其中0是最低接收信号的值,100是最高值的值,如表3中的示例所示。
表3的第一列列出了没有校准的传感器信号值; 表3的另一列列出了校准后的调整值。
表3校准模拟传感器
|
信号校准前 |

