
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
测量和分析透镜光纤探针作用于酵母细胞的光学捕获力
摘 要
基于单角度光纤探针以一定角度插入的光学捕获系统,通过静态和动态方法实验测量作为位移函数作用于酵母细胞的亚皮克纽顿诱捕力,分别对其测量过程进行详细介绍。在我们的实验中测得的最大捕获效率为0.07,比光学镊子低一个数量级。讨论了各种水平方向上的俘获力的特征。最后,对测量误差的分析显示了导致误差的因素及其大小,并提供了一种减少未来误差的方法。
1.介绍
1970年,Ashkin首先使用两个反向传播的,同轴对准的激光束来实现稳定的三维(3D)光阱[1]。光学捕获和没有物理接触的微观物体的操纵吸引了越来越多的科学家。特别是,自Ashkin等人[2]。1986年通过单光束梯度力光阱设计了光学镊子技术,该技术已广泛应用于各种生物样品,如细胞,病毒,细菌,DNA和运动蛋白[3-5],以及介电粒子和原子[3]。然而,该系统是复杂的,特别是对于多光束捕获,对于高数值孔径(NA)显微镜物镜用于成像并在样品颗粒上产生光学梯度力。作为替代方案,引入切割或透镜光纤探针以捕获样品。 使用相对位置的一对或多对光纤探针来实现稳定的3D光学捕获[6-9]。Taguchi等[10-12]使用透镜光纤探针来捕获和操纵微观腔室底部的物体,并使用两个透镜光纤探头旋转和悬浮3D物体[13,14]。最近,泰勒等人采用单纤维探头,在尖端附近具有环形光分布,通过静电力和光散射力之间的平衡来捕捉3D[15],Tam等人[16]采用光纤束通过光学捕获产生和再生微球阵列。
在上面引用的光学捕获方法中,Taguchi等人提出的单透镜光纤捕获[10-12]是2D操作中最简单,最有效的方法。他们对它进行了一些研究,并测量了被捕获粒子的移动速度作为位移的函数[11,12]。但是,没有提出光学捕获力曲线,也没有讨论捕获效率。基于我们建立的单透镜光纤捕获系统[17],光学捕获力作用于酵母细胞作为位移的函数,通过静态和动态方法分别对各个方向进行了实验测量,详细介绍了测量过程,并对实验结果,捕获效率和测量误差进行了定量讨论。
2. 原理和设置
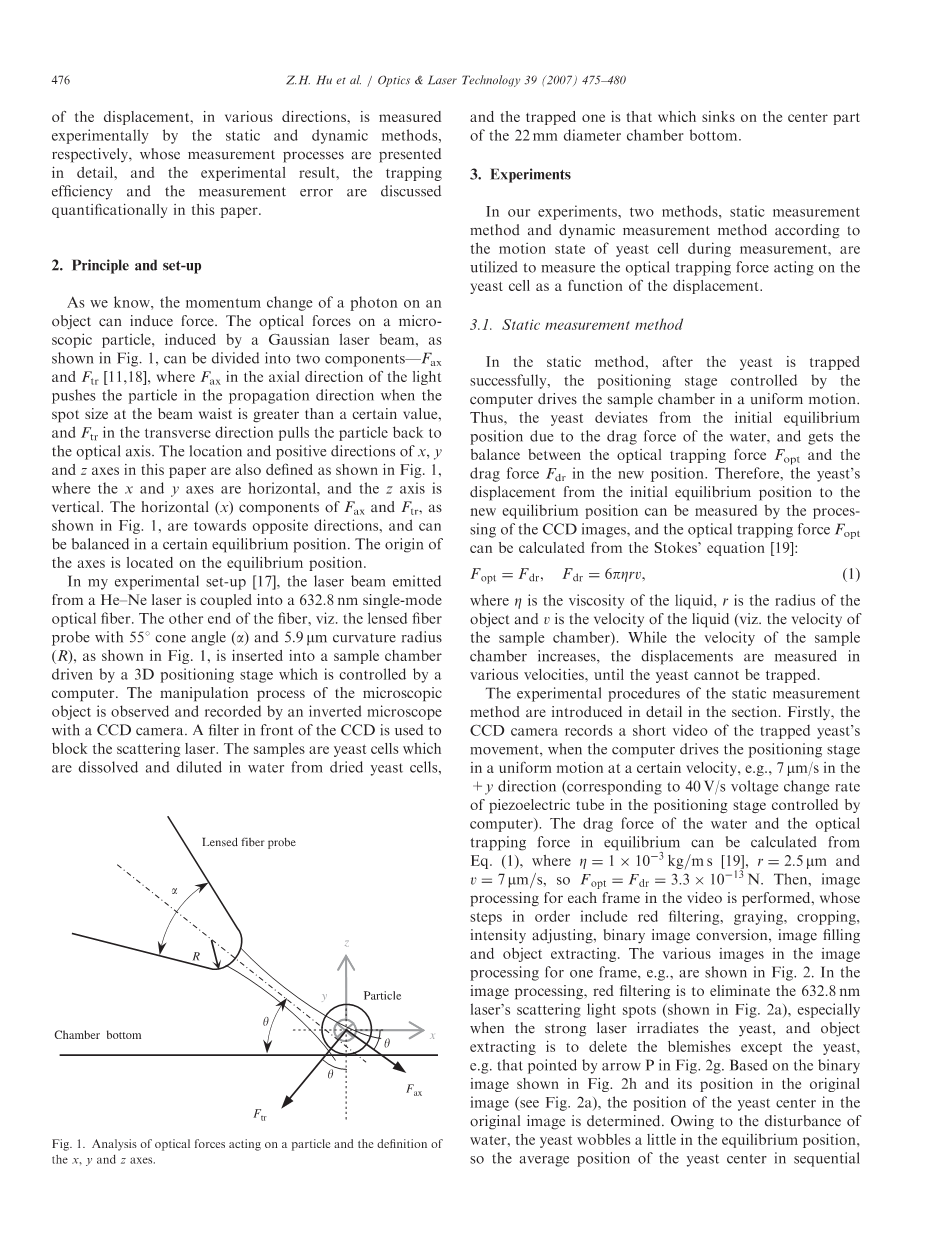
众所周知,物体上光子的动量变化可以诱发力。 由高斯激光束引起的微观粒子上的光学力,如图1所示,可以分为两个部分Fax和Ftr [11,18],其中传真在光的轴向上,当束腰处的光点尺寸大于某个值时,粒子沿传播方向推动,而横向上的Ftr将粒子拉回光轴。本文中的x、y和z轴的位置和正方向也如图1所示定义,其中x和y轴是水平的,z轴是垂直的。图1所示,Fax和Ftr的水平(x)分量朝向相反的方向,并且可以在某个平衡位置平衡。轴的原点位于平衡位置。
图2.1 分析作用在粒子上的光学力和x,y和z轴的定义
在我的实验装置[17]中,He-Ne激光器发射的激光束耦合到632.8 nm单模光纤。光纤的另一端,即。如图1所示,具有551锥角(a)和5.9mm曲率半径(R)的透镜光纤探针被插入由3D定位台驱动的样品室,该3D定位台由计算机控制。 微观的操纵过程用倒置显微镜和CCD照相机观察和记录。CCD前面的滤光片用于阻挡散射激光。样品是酵母细胞,它们从干燥的酵母细胞中溶解并稀释在水中,并且捕获的样品是在22mm直径室底部的中心部分下沉的酵母细胞。
3.实验
在我们的实验中,有两种方法,静态测量方法和动态测量方法,根据测量期间酵母细胞的运动状态作为位移函数用于测量作用于酵母细胞的光学捕获力。
3.1静态测量方法
在静态方法中,在成功捕获酵母后,由计算机控制的定位阶段以均匀的运动驱动样品室。因此,酵母由于水的阻力而偏离初始平衡位置,并在光学捕获力Fopt和光学捕获力之间取得新的平衡。因此,酵母从初始平衡位置移位到新的平衡位置可以通过CCD图像的处理来测量,并且可以从斯托克斯方程[19]计算光学捕获力Fopt:
其中eta;是液体的粘度,r是物体的半径,v是液体的速度(即样品室的速度)。当样品室的速度增加时,以不变的速度测量位移,直到酵母不能被捕获。
本节详细介绍了静态测量方法的实验步骤。首先,当计算机以一定速度均匀运动定位平台时,例如 y方向7mm / s(对应于计算机控制的定位阶段压电管的40V / s电压变化率),CCD摄像机记录被困酵母运动的短视频。水的拖曳力和平衡时的光学捕获力可以从等式1计算。其中eta;=1*10-3kg/ms[19],r=2.5mu;m和v=7mu;m/s,所以Fopt=Fdr=3.3*10-3N。然后,执行视频中每帧的图像处理,其步骤依次包括红色滤波,灰化,裁剪,强度调整,二值图像转换,图像填充和对象提取。例如,在一帧的图像处理中的各种图像如图2所示。
图2.图像处理中的一系列图像:(a)原始图像,(b)红色铿乴ing,(c)灰化,(d)裁剪,(e)强度调整,(f)二值图像转换,(g)铿乴,和(h)对象提取。捕获的酵母A是实验对象,未捕获的酵母B随着腔室向 y方向移动。(a)-(c)的尺寸均为320times;240像素。图像(d)是图像(c)中的虚线部分。图像(a)和(b)是彩色的,图像(c)“是”是灰色的,图像(f)“是”二进制的。
在图像处理中,红色滤光是消除632.8nm激光的散射光斑(如图2a所示),特别是当强激光照射酵母时,物体提取是为了除去除酵母之外的瑕疵,例如, 在图 2g中用箭头P指出。基于图2h中所示的二值图像及其在原始图像中的位置(参见图2a),确定酵母中心在原始图像中的位置。由于水的扰动,酵母在平衡位置摆动一点,因此,计算酵母中心在连续帧中的平均位置。通过该方法,计算当腔室不移动时酵母中心的位置。两个中心位置之间的差异是位移。 当然,需要预先校准从像素到公制距离的转换系数。具有1mm 2D标准图案的先前成像实验显示CCD图像的320times;240像素在物平面中指示80plusmn;60mm 2,因此转换系数为0.25mm /像素。因此,测量在3.3times;10-13N的俘获力下在 y方向上的位移,其为1.54mm。根据正方向的定义添加位移和俘获力的符号,实验数据表示为图3a中的点T。通过该方法,可以在plusmn;x和plusmn;y方向上测量各种光学力的位移,其结果显示通过静态方法测量的俘获力曲线(图3中的星号)。
3.2动态测量方法
在动态方法中,当捕获激光被阻断时,酵母位于酵母偏离平衡位置时的位置。然后,捕获激光耦合到光纤中; 因此,酵母可以回到平衡位置。 在整个过程中,CCD相机实时记录酵母的位置,并根据牛顿第二定律和斯托克斯方程满足以下等式:
其中Fopt是诱捕力,m是酵母的质量,S是它的位置,(相对于时间的导数)
是它的速度和(相对于时间的二阶导数)是它的加速度。 因此,陷阱力
可以从酵母位置的一阶和二阶导数作为时间的函数来计算:
而在一定时间内的位移可以从酵母的位置计算出来。 因此,可以获得作为位移函数的捕获力。
式(3)表明诱捕力Fopt由两部分组成——粘性力()和惯性力()。
众所周知,惯性力是可以忽略的,当雷诺数(Re = rho;vD/eta;,其中rho;是水的密度)非常小[19]。在我们的实验中,酵母的直径(D)和最大速度(v)分别为5毫米和12毫米/秒,所以Re=6*10lt;lt;1,惯性力Fa是可忽略的。尽管如此,我们仍然计算Fa以在下面的实验数据处理中比较Fa和Fv。
该段中介绍了该方法的详细步骤。首先,CCD相机记录了酵母从初始位置到平衡位置的捕获过程的视频。然后,通过上述相同的方法执行每帧的图像处理,并获得酵母中心的位置作为帧数的函数。例如,位置与帧沿 y轴的实验曲线表示为图4中的十字标记,由于水的扰动,这显然是不平滑的。因此,为了尽可能容易地计算位置的一阶和二阶导数,执行曲线拟合。因为,在整个捕获过程中,酵母在相同的方向上移动,并且起始和结束速度都是零,在我的曲线拟合中选择六个平滑单调函数,其开始和结束的一阶导数接近零:
其中参数a和b表示曲线的拐点的位置,以及参数n,m和k表示曲线的形式。当然,可以尝试更多功能以获得更好的曲线拟合。然而,以下实验结果表明这六个函数足够近似以适应动态测量和静态测量。表1给出了实验数据的曲线拟合结果(交叉标记为4),其中调整后的R平方在参考文献中[20]定义,是拟合质量的重要指标,越接近1,拟合越好。因此,根据表1,函数f3是最佳拟合,并且函数f1是下一个。然而,与实验数据曲线(图4中的交叉标记)相比,f1的拟合曲线(图4中的实线曲线)优于f3(图4中的虚线曲线),因此曲线拟合f1的结果在以下程序中选择。基于位置与帧拟合曲线,可以根据上面介绍的像素距离转换系数(0.25像素/ mm)和每秒视频帧数(24s-1)来转换度量位置对时间(S-t)的曲线。接下来,通过计算S-t曲线的一阶和二阶导数,获得速度对时间(S#39;-t)和加速度对时间(S#39;#39;-t)的曲线。相应的,力与时间(Fopt-t)由方程式(3) 从Fopt-t曲线和DS-t曲线,通过动态方法获得力与位移(Fopt-DS),其显示为图.3a中第I条实曲线的右侧部分(DSgt; 0)计算得出,而位移对时间(DS-t)是从S-t曲线计算的。以同样的方式,还测量了沿-y和plusmn;x轴的俘获力曲线,如图3所示。
图3.通过静态和动态方法测量作为位移函数的捕获力,输出功率为1.8mW。(a)沿y轴;(b)沿x轴。
图4. 沿 y轴的测量位置与框架曲线及其曲线拟合结果
表1. 沿 y轴曲线计算位置与框架的结果
|
曲线拟合功能 |
f1 |
f2 |
f3 |
f4 |
f5 |
f6 |
|
调整后的R平方 |
0.99432 |
0.99277 |
0.99455 |
0.99257 |
0.99430 |
0.99267 |
4.讨论
4.1实验结果
5mm直径酵母细胞的静态和动态实验结果,纤维探针的输出功率为1.8 mW,倾角为551°(图1中的theta;),如图3所示,它们彼此重合,这说明了两种测量方法的有效性。静态方法只能测量从平衡位置(原点)到沿着某个半轴( x,-x, y或-y轴)最大力的位置,而动态方法可以测量较宽区域的力,如图3所示。通过动态方法获得的实验结果表明惯性力(Fa),如图3中的虚线所示,近似等于零并且是可忽略的。这个结果与3.2节中的讨论相吻合。
根据实验结果,捕获力曲线具有几个特征。(a)沿 x和 y轴的捕获力为负,并且沿着-x轴和-y轴为正,因此沿x和y轴的力都是恢复力,并且总是朝向稳定的平衡位置。事实上,沿着x方向的诱捕能力取决于倾斜角度(theta;)。当theta;小于大约40度时,只有y方向俘获力是恢复力,x方向力总是正的。(b)沿y轴的力曲线具有奇怪的对称性。因此,沿 y轴的最大力的大小彼此相等(大约0.3pN),并且最大力的位移也彼此相等,这大约是酵母的半径。这些结果类似于单光束梯度力光学捕获的横向力曲线(参考文献[18]中的图2)。(c)所有方向上的捕获力的最大幅度沿-x轴,大约为0.56pN,并且与作用于酵母细胞的浮力(0.64pN)相当。(d)沿 x轴的俘获力(大约0.17 pN)的最大幅度是沿plusmn;x和plusmn; y轴的四个最大值中的最小值。
众所周知,光学俘获力与激光功率成正比,因此在我们的实验中计算了无量纲因子Q[21],称为俘获效率。Q = Fc / nP,其中F是光学捕获力,c是光速,n是介质的折射率(水的n = 1:33),P是入射功率。图3显示最大俘获力(F)大约为0.56 pN,功率为1.8 mW(P),因此最大俘获效率Qmax大约为0.07,比光学镊子低一个数量级,例如,Qmax=0:3用光学镊子捕获聚苯乙烯微球,水浸物镜NA = 1.25 [21]。例如,在光学镊子中Qmax = 0.3,用NA = 1.25的水浸物镜捕获聚苯乙烯微球[21]。因此,单透镜光纤捕获的捕获能力弱于传统光学镊子的捕获能力。
4.2误差分析
在本节中,我们将半定量地讨论测量误差,以提高未来工作中的测量精度。首先讨论了位
全文共9231字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[2502]

