
英语原文共 20 页,剩余内容已隐藏,支付完成后下载完整资料
基于两步径向基函数的CFD网格置换工具
Flavio Gagliardi (flavio@central.ntua.gr) Kyriakos C. Giannakoglou (kgianna@central.ntua.gr)
雅典国立技术大学(NTUA),机械工程学院,并行CFD和优化单元,希腊雅典。
摘 要
基于径向基函数(RBF)插值的网格位移以保持网格的有效性和质量(即使是大位移)而不受网格连接性影响的能力而闻名。但是,在大型网格的情况下,例如在现实世界中的计算流体动力学(CFD)应用中使用的网格,其标准公式中的RBF插值变得非常昂贵。通过将过程分为两步,提出了一种基于RBF的网格置换成本降低技术。在称为预测变量的第一步中,使用了一种数据缩减算法,该算法通过减小RBF插值问题的大小来自适应地聚集网格边界节点。第一步完成后,由于结块以及将RBF插值也应用于边界节点这一事实,如此位移的边界与给定的位移不匹配;因此,边界节点的位置必须在第二步(称为校正器)中进行校正。后者基于带有局部支持的RBF内核执行局部变形,以使边界符合其节点的已知位移。通过基于几何考虑和稀疏多极点方法,采用稀疏近似逆预处理器来加速提出的方法。该方法和编程软件在三个测试案例中得到了验证,这些案例与管道和涡轮定子排以及汽车模型周围的CFD网格变形有关。
介绍
在CFD中,在许多应用中出现了使现有网格适应位移边界的需求,包括空气动力学形状优化,空气弹性模拟和存在运动物体的流动模拟。网格位移是重新网格化的一种替代方法,因为网格化可能会妨碍从非结构化网格(例如先前领域)的可用数值解继续进行新的模拟。
过去已经提出了各种网格位移方法来满足来自各种类型的仿真甚至学科的特定要求。这些可以通过几种方式进行分类。一些遇到的分类是基于插值,控制网格和物理类比的方法[1], 代数与偏微分方程方法[2], 基于连接性与基于点的方法[3], 结构化或非结构化网格的方法[4] 和可以或多或少有效地并行化的方法[5]. 最近的调查,例如[1] 和[6], 列举网格的优缺点基于各种应用和质量标准的置换方法。
长期存在的网格置换方法是弹簧类比,将网格建模为线性网络[7], 扭转的[8], 半扭转[9] 和球形弹簧[10] 并求解静态平衡方程以找到更新的节点位置。这些方法对于网格进行结构分析是有效的。[1] 报告了用于处理粘性流模拟中带有拉伸元素的CFD网格的大位移的无效元素和较高的计算成本。此外,这些方法要求CFD网格的连通性可用,并且很难扩展到通用多面体混合网格。
连续弹性方法已经由多位作者提出(即[11–13]). 他们通过求解网格本身上的线性弹性方程来置换网格,因此应该知道连通性。拉普拉斯方法[14] 解决拉普拉斯PDE,将表面网格节点位移扩散到域。尽管较大的多个频率,该方法对于单频率变形还是有效的变形可能会导致无效的网格。通过求解双谐波平滑方程,可以实现置换网格的更好质量[15], 以增加的计算成本。代数阻尼法[16] 基于每个内部网格节点的位移移动边界上最近的节点。所产生的变形似乎在边界附近非常刚性,但是,对于较大的网格变形,可能需要进行代数平滑以提高网格质量。Delaunay图法[17] 基于边界节点的Delaunay三角剖分和内部节点在Delaunay图上的映射的控制网格的生成。三角剖分适应于几何形状的变化,并且体积网格节点通过重心插值进行重定位。逆距离加权(IDW)方法[18] 根据权重取决于它们到边界的距离,通过直接对边界节点位移进行插值来计算内部节点的位置。超限插值[19] 基于沿网格线的变形插值,该插值计算效率高,但仅限于结构化网格[20].事实证明,基于RBF插值的网格位移对大变形具有鲁棒性[21].
[1] 比较了最常见的技术,包括线性和扭转弹簧,线性弹性以及几种基于插值的方法,例如RBF和IDW。最后,通过基于RBF插值的网格位移识别是关于鲁棒性和网格质量的最有前途的方法之一。贪婪的数据约简算法可以缓解其高计算成本和差的可扩展性。[22] 根据RBF内插法对网格位移方法进行了基准测试,并针对先前在2006年测试的六种技术[6] 并得出结论,前者虽然价格较高,但可以产生质量更高的变形网格。[18] 对比了基于RBF和IDW的网格位移,并证明了后者的计算成本比前者降低了20倍,而六面体网格用于75,000个单元的无粘性流动模拟。但是,RBF方法产生的网格质量比IDW稍好。
sim;
标准形式的基于RBF的网格位移的低效率是由于需要计算线性方程组,其等级等于位移和固定边界节点的数量,此外还需要计算内部位移节点。近年来,许多研究人员致力于降低RBF插值的成本。尽管最近几年在该领域取得了进展,但这个问题仍然需要新的策略和改进。
在本地支持下使用RBF内核是降低RBF插值成本的第一个突破[23].它们导致可以更有效地求解的稀疏矩阵。但是,存在变形的平滑传播(网格质量)和矩阵的稀疏性(计算成本)之间的权衡。对于较大的变形,必须扩大局部支撑,问题是
变得与具有全球支持的RBF内核相似,从而消除了本地支持的好处[23]. 这个问题在[24] 通过将变形分为较小的步骤,这些步骤由具有小半径的局部支持的RBF插值控制,从而导致要解决的一系列非常稀疏的线性系统。类似的方法(称为多级RBF技术)涉及嵌套的RBF插值的连续级别,通过该级别在每个级别上插值先前较粗糙级别的解决方案[25, 26]. 提出的网格位移方法[27] 基于域分解和局部RBF插值导致一系列小问题。
贪婪算法[4] 通常从粗略地近似到网格变形,然后迭代细化直到达到所需的精度。贪婪方法使用表面网格节点的子集来描述新形状,而其余节点则用于错误检查。因此,尽管它们不能精确地再现所有表面变形,但它们比标准RBF插值更为有效。对于严格的公差,要保证将误差降至规定的公差要求的迭代过程非常耗时。[28] 通过考虑实际施加位移并先验计算表面网格节点的子集。[3] 提出了通常在多网格方法中采用的边界节点的聚集策略。[29] 提出了一个增量最小二乘法求解器,类似于贪婪算法,它使用表面网格节点的子集来近似变形。[30] 提出使用多尺度RBF插值,该插值采用多个支撑半径来捕获不同尺度的变形。插值矩阵是从源节点的粗略子集开始构建的。该算法通过使用支撑半径迭代添加剩余的源节点来进行,这样新添加的节点就不会影响前一个节点,从而以更易于求解的线性系统结束。[4] 在近似步骤之后,建议了一个校正步骤,例如Delaunay图映射;但是,从质量和鲁棒性的角度来看,本地支持的RBF插值似乎是一个更好的选择[31].
本文介绍了一种用于网格置换的两步成本降低技术,3. 这两个步骤基于RBF插值使网格连续变形,其原理在本节中概述。2. 通过使用稀疏近似逆(SPAI)预处理器,可进一步加快插值速度, 快速多极方法(FMM),和一个基于整数格的方法.
建议的策略和编程的软件用于以下三个基准测试用例:
5. 在5.1节中, 将所提方法产生的网格质量与标准RBF进行比较。在5.2节中, 对软件的可扩展性进行了分析,以使其在具有巨大网格尺寸的情况下更加高效。在5.3节中, 通过更改主要输入参数来研究软件的性能。最后,在5.4节中, 在基于进化算法的优化中,对所提出的网格位移方法对大位移的有效性进行了测试。
基于RBF的插值背景
RBF网络是RBF内核在Q维空间中插值分散数据的加权线性组合。具体而言,在网格位移中,要内插的量是K个曲面网格节点处或通常在K个不同源节点处的已知3D位移。3D RBF内核是实值函数,具体取决于点与点的距离r。所谓的RBF插值源代表欧几里得距离。
为了内插给定的位移必须使用以各个节点为中心的KRBF内核。RBF插值的形式为:
计算权重以便精确地再现K个源节点处的已知位移;这需要具有不同右手边(r.h.s.)阵列的Ktimes;K线性系统的数值解。
times;
方程1 通常通过添加多项式项来修改仿射运动以保留仿射运动,即平移,旋转和缩放。在3D中,包括一阶多项式的RBF插值采用以下形式:
其中是多项式系数。为了计算新的自由度,引入了新的条件。假设光源不是共面的,则这些条件是:
and ⊙
其中表示零向量和逐项乘积运算符。那如果
,rsquo;
and ,
要求解的(K 4)times;(K 4)线性系统为
对于较大的K值,通过求解方程来计算W和A变得昂贵。如果天真地实施,由于线性求解器的复杂性及其刚度,它的可伸缩性较差。解方程5 称为插值的训练阶段,而通过公式计算所有网格节点或目标的位移,2是插值阶段。有关这些类型插值可解性的更多理论,请参见[32].
RBF插值的行为深受所选内核的影响[23], 本地或全球支持。前者需要定义局部支撑半径rs,该半径确定内核在每个源节点周围的影响区域。因为当且仅当,r﹤时,所以施加在源节点上的位移仅影响位于相应内核影响区域内的网格节点。较低的支撑半径会导致更好的条件条件和稀疏矩阵Phi;,而变形会散布在内部网格的较小部分上。
通过适当选择内核,请参见3, 矩阵Phi;对称且为正定。但是,等式左侧的块矩阵5 通常不是肯定的。
两步走策略
所提出的两步策略将网格位移问题分为两个连续的基于RBF的插值子问题:
在第一步(预测器)中,所有网格节点(表面和内部)都是全局RBF插值的目标,并且通过数据约简方法生成了一组粗化的源节点。后者考虑了网格节点的空间分布和要内插的位移场。在此步骤中,插值采用方程式的形式2 包括一阶多项式项。但是,在置换整个网格之后,边界节点将无法精确地遵守已知位移。
bull;
第二步(校正器)通过局部变形校正曲面网格节点的位置。所有曲面网格节点均成为源,只有靠近曲面的小体积内部节点成为目标。在这一步中,RBF插值采用公式的形式1.
bull;
这两个子问题比原始问题更易于管理。实际上,第一步生成一个“小”但密集的系数矩阵(其秩可能比表面节点的数量低几个数量级),而第二步生成一个“大”(秩等于表面节点的数量) ),尽管矩阵非常稀疏。该策略可显着减少用于置换网格的计算成本。
步骤1:预测器
预测器基于数据缩减,据此,可以通过聚类对源节点集进行粗化。目的是生成一组减少的源,这些源代表表面网格的位移场。为此,采用了一种自适应八叉树数据结构,该结构递归地分割笛卡尔空间。通过考虑表面网格节点密度和位移的空间梯度,在施加的表面节点位移快速变化的区域中会生成更多源。详细地,该算法从包含所有曲面网格节点的单个父盒开始。根据包含的表面节点的数量(以确保在人口稠密的区域中具有适当的分辨率)和包含的表面节点的位移的最大差异(以确保在位移场快速变化的情况下具有适当的分辨率),递归拆分每个父盒。忽略空盒子,将划分父盒子(只划分一个子盒子),而不考虑上述标准,直到达到最大深度限制。叶子(无子代)八叉树框的中心在预测器训练阶段用作RBF插值源。每个源采用八叉树的相应叶盒中包含的曲面网格节点的平均位移。数字1 说明了在管道的CFD表面网格上选择的插值源的示例。
预测器引入的位移的近似值由节点误差测量,该节点误差在每个()曲面网格节点处定义为:
其中,在预测步骤中,,预测变量()是表面网格节点的已知位移与计算值之间的差在预测变量步骤,预测变量()中。与通常使表面误差范数最小化(总结所有表面节点误差)的贪婪方法相反,在提出的方法中,与已知边界位移的任何偏差都在校正器中解决。
minus;
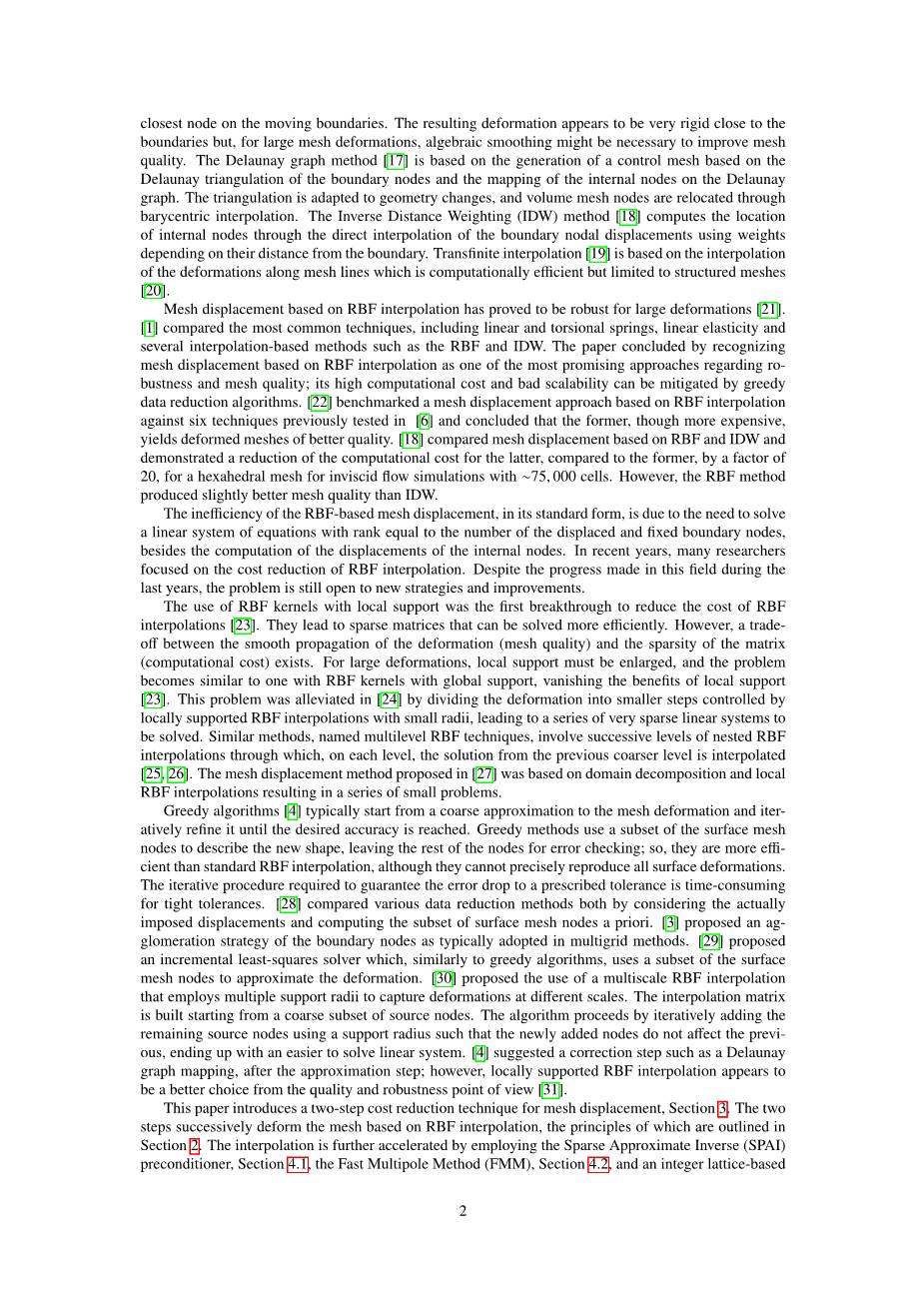
图1:双肘管。在本节中研究的管道的预测器步骤中,由数据约简算法生成的RBF源(球体)5. 从蓝色到红色的颜色代表小到大的位移delta;。参考管和位移管的形状分别用灰色和蓝色表示(另请参见图2)。9). 大多数RBF源位于位移的高空间梯度区域。计算的源不一定位于网格表面上。
步。预测器步骤的作用是生成一组简化的源点并近似位移场。
考虑到网格质量保留等特性,选择了全局支持的RBF内核[4],线性
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[240312],资料为PDF文档或Word文档,PDF文档可免费转换为Word

