英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
翻译 多船只耐波性的线性势流理论计算
关键词:耐波性、船舶运动、水力相互作用、附加质量
摘要:使用传统的二维(2D)和三维(3D)边界元方法研究两艘近距离船只间的波浪运动。 并对船间附加质量、阻尼和自由表面的表现进行了详细的研究。正如以前的工作所预期的那样,发现船舶之间的水的反应对水动力具有很大的影响。 在对应于船体之间驻波的“临界频率”上,水动力受到显著的剧烈变化。 比较2D和3D结果,并考察了船间倾斜角的影响, 在时域模拟的临界频率下的行为的一些结果进行了检查,其中最重要的是一个非常轻微的阻尼脉冲响应。
- 介绍
分析和模拟航行中多艘船舶之间的货物转运操作需要准确评估作用于每艘船舶的水动力。 相对运动,包括振幅和阶段的合并,每个船只的每种运动模式,对于评估使用船上起重机在另一艘船上拾取或放下重容器的潜在危险至关重要。为了正确预测这些运动,必须适当考虑船舶间的水动力相互作用。 这就需要同时求解所有相互作用的船只的水力学控制方程。
基于线性理论在频域上计算这些水动力的方法已经建立(Newman,1977 a;Faltensen,1990;Lewandowski,2004);几个商业耐波套件现在吸收了多个机构的能力。然而,在大多数实际利益的情况下,船舶是系泊在一起的;因为力对于系泊线和护舷的挠度特性是高度非线性的(它们分别产生一个只有正向延长或压缩的力,并且具有非线性负荷与伸长行为)都必须在时域内进行模拟。
船只之间流体的反应可以对流体动力产生重大的影响。在与船体之间的驻波相对应的频率上,水动力经历显著的剧烈变化,其中阻尼表现出delta;函数类行为并且附加质量经历最大值和最小值(通常是负值);该行为被限制在相对较窄的频带内。然而,在低于第一振动模式的频率下,存在另一种类型的共振行为在水面垂直移动时,其中表面保持基本水平;这种类型的共振与驻波有本质上的不同,因为它不能发生在封闭的水域中。这被称为“零模式”(Wang和Wahab,1971)或“泵模式”(相对于更高的共振即“晃动模式”)。例如Newman(1974),Wang(1981),Wang和Wahab(1971)以及最近由Yeung和Seah(2007)和Elkin和Yeung(2007)等人在严格连接的双体船状结构中的双缸圆柱体的行为已经被广泛地研究了。 Srokosz和Evans(1979)研究了两个独立振荡柱体的情况,但在他们的详细分析中采用了“远场”近似值。在三维方面,Ronaelig;ss和Faltinsen(2000,2001)进行了一些有限的研究,他们也使用了“远场”近似值,Jacobsen和Clauss(2006)进行了时域模拟,但没有详细讨论水动力和相互作用。目前的工作主要集中在频率和时间域上的两个独立运动的物体。
由于模拟多艘船只所需的时域力目前不是由现有的任何现成的“现货供应”的耐波套件生产的,因此必须使用频域数量进行计算。 这涉及到傅里叶变换的数值评估(Journee,1993),以便计算时域模拟时所需的脉冲响应函数(irfs)。 目前的工作探索了泵送和晃动模式对脉冲响应函数和两个相互作用船只的计算运动的影响。
- 计算
2.1构造
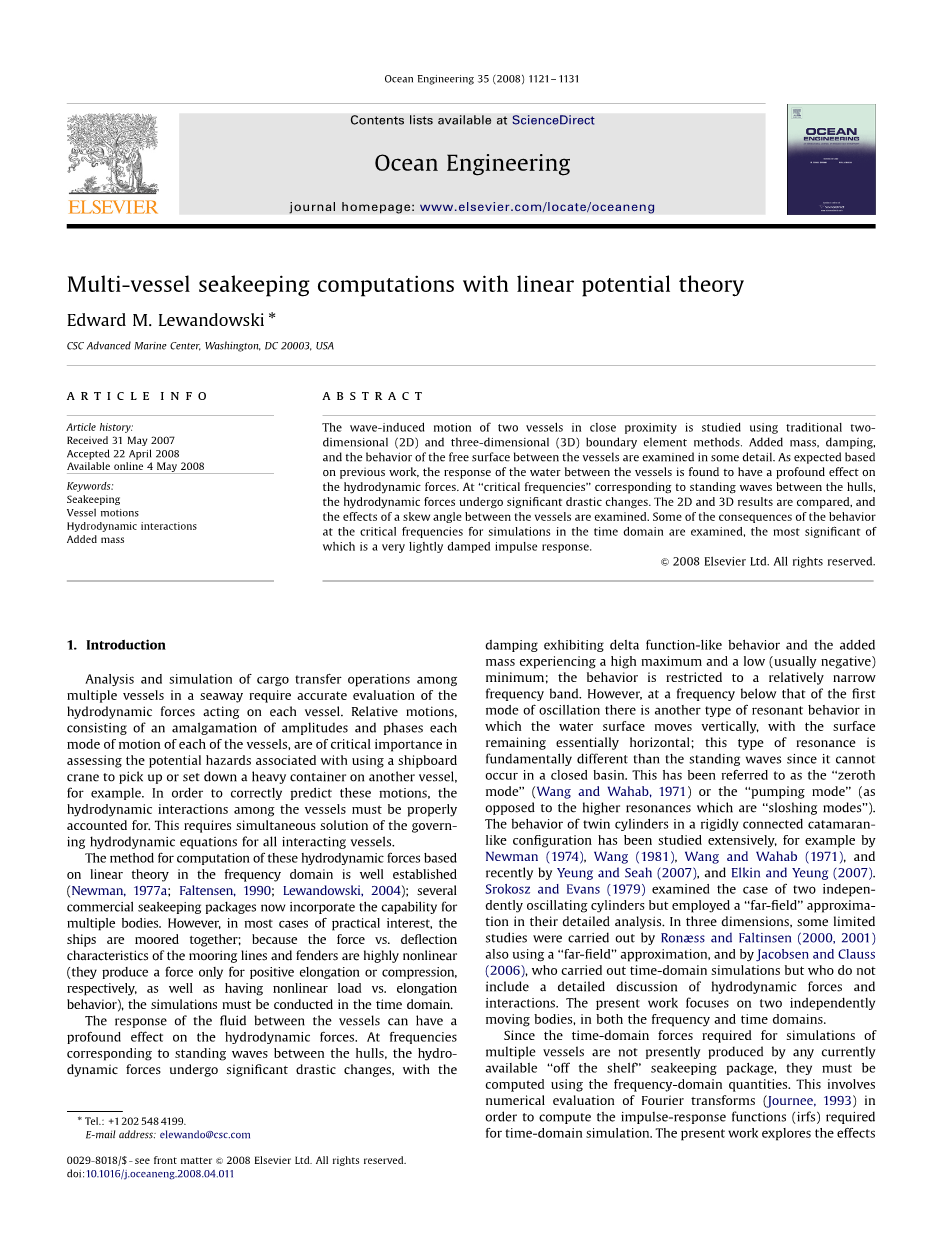
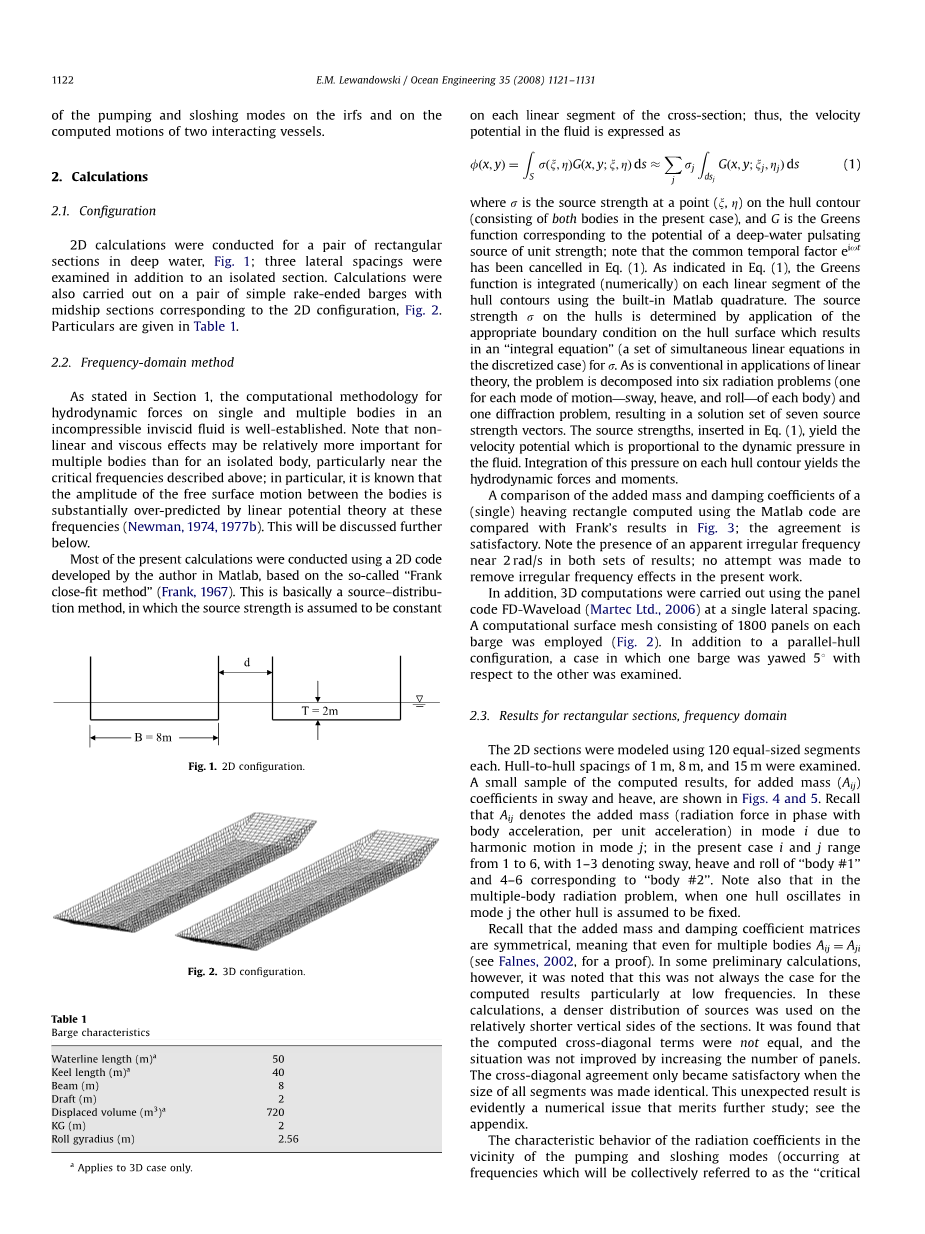
对深水中一对矩形截面进行了二维计算。1;除了一个孤立的截面外,还检查了三个横向间隔,并对一对简单的前缘驳船进行了计算,这些驳船的中段对应于2d结构,图2,详情载于表1。
2.2频域法
如第1节所述,不可压缩无粘流体中单个和多个体上流体动力的计算方法已经完善。 请注意,非线性和粘性效应对于多个物体可能比孤立物体更重要,特别是在上述临界频率附近; 特别是已知在这些频率下,物体之间自由表面运动的振幅基本上被线性势流理论超预测(Newman,1974,1977b)。 这将在下面进一步讨论。
目前的大部分计算都是使用作者在Matlab中开发的2D代码进行的,该代码基于所谓的“弗兰克贴身法”(Frank,1967)。 这基本上是一种源分布方法,其中假定源强度在横截面的每个线性段上是恒定的; 因此,流体中的速度势能表示为
其中sigma;是在船体轮廓上的一点(xi;,eta;)处的源强度(在本例中由两个物体组成),而G是对应于单位强度的深水脉动源的潜流的格林函数;注意,共同的时间因子eiomega;t已在方程(1)中被取消。如方程(1)所示,在船体轮廓线的每一线性段上,利用内置的matlab样条,将格林函数积分(数值),在船体表面应用适当的边界条件,得到船体表面的源强度sigma;,从而得到sigma;的“积分方程”(离散情况下的一组联立线性方程组),正如线性理论中的常规方法一样,对问题进行分解。每个物体的六个辐射问题(每个运动模式一个--摇摆、升沉和滚动)和一个绕射问题,导致一个由七个源强度矢量组成的解集。将源强度代入方程(1)求出与流体中的动态压力成正比例的速度势能,将此压力积分到每个船体轮廓上,产生水动力和力矩。
将使用Matlab代码计算的(单个)隆起矩形的附加质量和阻尼系数与图3中Frank的结果进行比较; 该结果令人满意。注意两组结果在2rad/s附近都存在明显的不规则频率;本工作未尝试消除不规则频率效应。
另外,使用面板代码FD-Waveload(Martec Ltd.,2006)以单横向间距进行3D计算。 计算表面网格由每个驳船上的1800个面板组成(图2)。除了平行船体结构外,还检查了一艘驳船相对于另一艘驳船垂摇5°的情况。
2.3矩形截面的结果,频域
二维截面使用120个相同大小的段进行建模。 检查了1米,8米和15米的船体间距。 对于附加质量(Aij)摇摆和起伏的系数,计算结果的一个小样本显示在图4和5中。 回忆Aij表示由于模式j中的谐波运动而导致的模式i中的附加质量(与体加速度相关的辐射力,每个单位加速度); 在本例中,i和j的范围从1到6,其中1-3表示“体#1”的摇摆,隆起和滚动,以及4-6对应于“体#2”。 还要注意,在多体辐射问题中,当一个船体以模式j振动时,另一个船体要被假定是固定的。
回顾一下,附加质量和阻尼系数矩阵是对称的,这意味着即使对于多个物体A ij = A ji(参见Falnes,2002,用于证明)。 然而,在一些初步计算中,有人指出,计算结果并非总是如此,特别是在低频率时。 在这些计算中,在部分的相对较短的竖直侧上使用更密集的源分布。 发现计算出的交叉对角线项不相等,并且情况没有通过增加面板数量而得到改善。 当所有部分的大小相同时,交叉对角线协议才变得令人满意。 这个意外的结果显然是值得进一步研究的数值问题; 见附录。
泵浦模式和晃动模式附近的辐射系数的特性行为(出现在将被统称为“临界频率”的频率处,由Yeung和Seah提出,2007)是显而易见的:阻尼系数表现出delta;函数类行为和附加质量通常首先经历最大值,然后是最小值(有时变为负值),大致集中在阻尼最大值上。这些“尖峰”的带宽随着频率的增加而下降;然而,很难得出关于其大小的结论,因为这取决于计算频率与实际谐振频率有多接近。值得注意的是,没有观察到阻尼系数在临界频率或临近频率附近达到零,这与杨的双体船配置结果不同。例如,图6显示了在第一晃动频率附近的8m船体间距处的晃动阻尼的特性;观察到的最小值约为0.25rho;BT。这里定义的“临界频率”是指阻尼力的最大值(例如在这种情况下为2.02rad / s)。
晃动模式的频率与间隙中与驻波相关的频率非常接近。 图7显示了三个间距的摇摆附加质量系数与间隙宽度与辐射波长度的比值。 临界频率出现在
其中lambda;是与第n模式相关的波长,d是间隙宽度; 后者的表达仅适用于“深水”。 因此,临界频率随着间隙宽度的增加而变得越来越接近; 矛盾的是,随着间隙宽度的增加,单体结果不会被恢复!
第零或“泵”模式的频率更难以预测。 对于小的间距,Newman(2003)建议,可以将间隙中的水像固体一样处理,就像石浮标一样,以得到泵浦模式频率的估计值:
其中T是吃水;在目前的情况下,屈服omega;0=2.2。这确实接近狭窄间隙的计算结果,但更宽的间距的泵浦频率要低得多;计算给出如下明显的泵浦频率:
这些结果与McIver,Newman和其他人(例如McIver和McIver,1997; Newman,1999; Porter,2002; McIver,2003)研究的“陷阱结构”相关的结果非常相似。 这些是专门设计用于在特定频率下具有零波辐射(并因此为零波阻尼)的物体。 陷阱结构一般由二维流动的两个物体或三维空间中具有“月池”(如环形体)的物体组成; 零辐射频率对应于目前工作中的临界频率(尽管在目前的情况下,阻尼从未完全达到零,如前所示)。 对于目前的连接,Newman / McIver在这些临界频率附近附加质量和阻尼行为的结果特别感兴趣。
其中A1和B1是频率的有界函数,C是正常数,omega;T是“近陷阱模式”的频率,ε是小参数。 ε→0的极限情况表示真正的陷阱模式,而有限值对应于“近陷阱模式”。 这些非零ε的“近陷阱模式”在这里是相关的,这将在下面讨论。
临界频率附近的行为类似于在应用源分布技术时浮体问题变得病态的“不规则频率”处的行为。 但是,不规则频率下的行为与物理现象无关,而是解决方案过程中的缺陷。 Wu和Price(1986)提出了一种预测任意几何体不规则频率的方法。 Lee和Sclavounos(1989)描述了一种消除不规则频率效应的技术。
-
- 空隙中的自由表面高程
自由表面在船体之间的空间中的响应是有意义的,特别是在货物在船舶之间转移的正在进行的补给操作中; 一个关注的问题是要让货物远离水。 请注意,“自由表面的响应”必须仔细定义,因为它包括来自每条船的辐射波以及来自入射波和衍射波的贡献组成。 辐射波的大小依次取决于船体运动的幅度,因此如果不先计算船体运动,就无法计算“总”自由表面响应。
这就是说,在本研究中,分别研究辐射和衍射效应的单位运动或单位入射波振幅的各种贡献可能是最有意义的。 图8和图9显示了8m船体间距时,由#1机身摆动和起伏引起的波浪振幅和入射 衍射波,分别用于靠近泵送和第一晃动模式的频率。 在泵送模式下,自由表面接近水平,如预期的那样; 对于晃动模式,船体之间有一个中间节点。 请注意后一种情况下反应的高度调整性质。
泵送模式计算的最大波振幅大致是船体运动振幅的两倍,这不是不合理的。然而,对于晃动模式计算的最大值(高达运动幅度的70倍)是可笑的,但与先前的结果一致(例如Newman,1974,1977b,2003; McIver等,2003);这是线性无粘性流体理论的一个不如意的结果。尽管晃动模式的波高值难以测量,但它们显然会受到打破极限的限制;例如,在8m间距处,第一晃动模式的最大波高将约为1.1m。作为解决这个问题的一种方法,Newman(2003)建议在间隙中放置一个弹性“垫子”以人为地限制自由表面的偏移;与垫子相关的阻尼是任意的并且必须由使用者指定。除了找到阻尼的合理值之外,这种方法还有另一个困难:在时域中(就像在频域中),垫子必须被视为另一个独立的体(以及是一个灵活的个体),需要计算额外的脉冲响应函数集合,附加质量矩阵等;这似乎并不实际,特别是在非零速度的前进速度下(速度对垫子行为的影响是什么?)。另外,这种方法显然要求在整个模拟过程中船体间距保持基本不变。更实际的方法可能是在转换到时域之前以某种方式调整临界频率附近的流体力学系数的值,以消除或减小明显夸张的值的幅度。这个问题需要进一步考虑,但不在本工作的范围之内。
2.5向时域转换
在时域中,浮体的运动方程可以用体动和波动实现与脉冲响应函数的卷积来表示; 这些通常被称为“康明斯方程”(Cummins,1962):
的
这里,N对应于相互作用物体的数量,M是组合的6Ntimes;6N质量矩阵,a是“真”或“无限频率”附加质量矩阵,xj是模式j中的体运动, K和KD分别是与辐射和衍射相关的脉冲响应函数,C是恢复力矩阵,xi;是每个物体参考点处的自由表面高程,chi;是波向;对于非隆起海域,波向上的积分或求和也是必要的。注意右边的卷积延伸到未来;因此需要了解遇到的波浪的“未来历史”(显然需要了解未来船只的位置)。这种非因果行为使得时域模拟变得困难;这是使用基于卷积的方法必须付出的代价。可能出于这个原因,在实践中,(6)的右边常常被写成由频域激振力与一定频率范围内的波振幅的乘积给出的正弦项的简单求和。除了变得不一致之外,这排除了处理诸如改变航向或速度等瞬态情况的可能性。
“记忆函数” Kij可以根据频域附加质量和阻尼系数计算:
所以方程式(7)或(8)任何一个都可以用来计算Kij; 在实践中,方程 (7)是优选的,因为积分(其必须用数值计算)通常更加迅速地收敛。
通过使用(复杂)频域波激振力的全傅立叶变换来计算波浪力KD的脉冲响应函数。 然而,本文的重点将放在辐射力上。
根据上述频域结果计算的单个矩形截面的摆动和起伏运动的记忆函数如图10所示。在这些计算中,数值积分采用Filon求积(Abramowitz和Stegun,1965年 ),积分上限为10rad / s(计算出的阻尼系数基本等于零)。 回想一下脉冲响应函数对应于在t = 0时单位的“速度脉冲”之后由流体施加的力; 在这种情况下,效应在大约15秒内衰减到零。
对于两个物体,可以通过检验方程式(5)来获得泵送和晃动模式对记忆函数的影响。 假设εlt;lt;
全文共8782字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[16234],资料为PDF文档或Word文档,PDF文档可免费转换为Word

