
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
卡车主导公路路段的组合变速限制和变道控制
摘要:高速公路网络对卡车的交通需求正在迅速增加,这对公路交通的流动性、安全性和环境造成了损害。变速限制(VSL)控制被认为能够改善卡车主导的高速公路路段的交通状况。然而,以前的研究报告了VSL控制器对交通流动性的混合影响。虽然一些研究报告了由于使用VSL控制而导致的旅行时间的改善,但其他研究报告了旅行时间的改善或小恶化。在本文中,我们证明了行驶时间缺乏改善是由于车道变化发生在瓶颈附近,导致严重的容量下降。我们开发了一种联合车道变更和VSL控制策略,提前推荐车道变更以缓解容量下降。微观的蒙特卡罗模拟I-710高速公路上的交通需求被用来证明这种组合控制策略能够产生关于行驶时间的一致改进,不同交通状况和事件场景下的安全和环境影响。
1.引言
卡车是美国和世界各地地面运输的重要组成部分[1]。与轻型车辆[2],[3]相比,卡车由于其尺寸和较慢的动力学而对交通流量产生不利影响。特别是在卡车占优势的高速公路路段,卡车的容量相对较高,行驶时间延迟,各类车辆事故率和大气污染物排放率均高于其他地区的平均水平。因此,卡车主导的公路网需要有效的交通流量控制策略来调节交通流量,避免或推迟拥堵,减少事故和排放。
变速限制(VSL)是一种重要的高速公路控制策略,长期以来一直被研究和报道能够平滑交通流量和抑制冲击波[4]-[6]。在卡车主导的公路网中,卡车的机动,如加速、减速和变道,可能很容易干扰交通流量,增加行驶时间和尾管排放。因此,考虑通过平滑和均匀交通流量来改善具有VSL的卡车主导公路路段的交通流动性、安全和环境影响是很自然的。
VSL对交通安全的好处已在模拟和现场测试中显示出来,同时也进行了大量研究,以设计和评估不同的VSL控制方法,以改善交通流动性和环境影响。[6]-[8]。这些VSL方法被报道在宏观模拟中改善交通流动性。然而,在大多数情况下,这些改进不能在微观层面上重复,并且由于许多难以测量或预测的微观和随机因素,不同交通状况的性能不同。本研究的目标是找到一种在不同交通状况下提供一致改进的控制方案。
高速公路拥堵通常发生在事故、车道下降等引入的瓶颈处。在我们的研究中,我们了解到VSL方案面临的一个问题是,大多数车道变化发生在瓶颈附近,造成拥堵和恶化的可能的行驶时间改善。VSL。尤其是在货车占优势的公路路段,排队的单辆货车换道可能会打破开放车道的交通流,导致严重的交通混乱。这一观察促使我们使用组合车道变更(LC)和VSL控制策略来减少瓶颈处的拥堵。
在这种提出的组合控制方法中,LC控制为上游车辆提供了车道变更建议,这使得强制车道变更沿着长距离传播,从而缓解了瓶颈处的容量下降。部署了局部反馈VSL控制器以保持下游密度并抑制流量扰动。约束应用于驱动程序接受的VSL命令。我们已经证明了在不同的瓶颈场景下使用蒙特卡罗微观交通模拟,这种结合的LC和VSL控制方案保证了在行驶时间、安全和环境影响方面的一致改进。
已经进行了许多研究来评估高速公路上的VSLs,但是没有一项研究考虑到了卡车的影响。在[9]中,Abdel-Aty等人评估了VSL在高速公路上的安全效益。作者得出结论,配置良好的VSL策略可以降低碰撞可能性,但速度限制的巨大差距随着时间和空间可能会增加它。在这项研究中没有观察到旅行时间的改善。
在[7]中,Hegyi等人采用了模型预测控制(MPC),以所有车辆的总行程时间(TTT)作为成本函数来确定最优VSL控制。该研究报告在宏观模拟中使用该方法的TTT减少了21%。然而,这种基于模型的控制方法对不同的交通场景并不具有鲁棒性。在[10]中,Long等人将与[7]中相同的方法应用于公路工作区场景,并且没有发现TTT的显著改善。
在[8],[11]中,提出了两种不同的静态反馈控制器,以最大化高速公路瓶颈处的流量。两项研究都证明了闭环稳定性。然而,只有当速度限制不断变化时,稳定性才会保持不变,这对于驾驶员来说是很难遵循的,如果不是不可能的话。
LC控制或LC建议已在高速公路中用于处理车道关闭或帮助合并。在[12]中,Jha等人评估了I-93南隧道的三种不同的车道控制信号设置。研究表明,在事件条件下,行驶时间对上游道路几何形状和驾驶员达标率敏感。不小心配置的LC信号设置可能导致旅行时间的增加。
图1:公路瓶颈
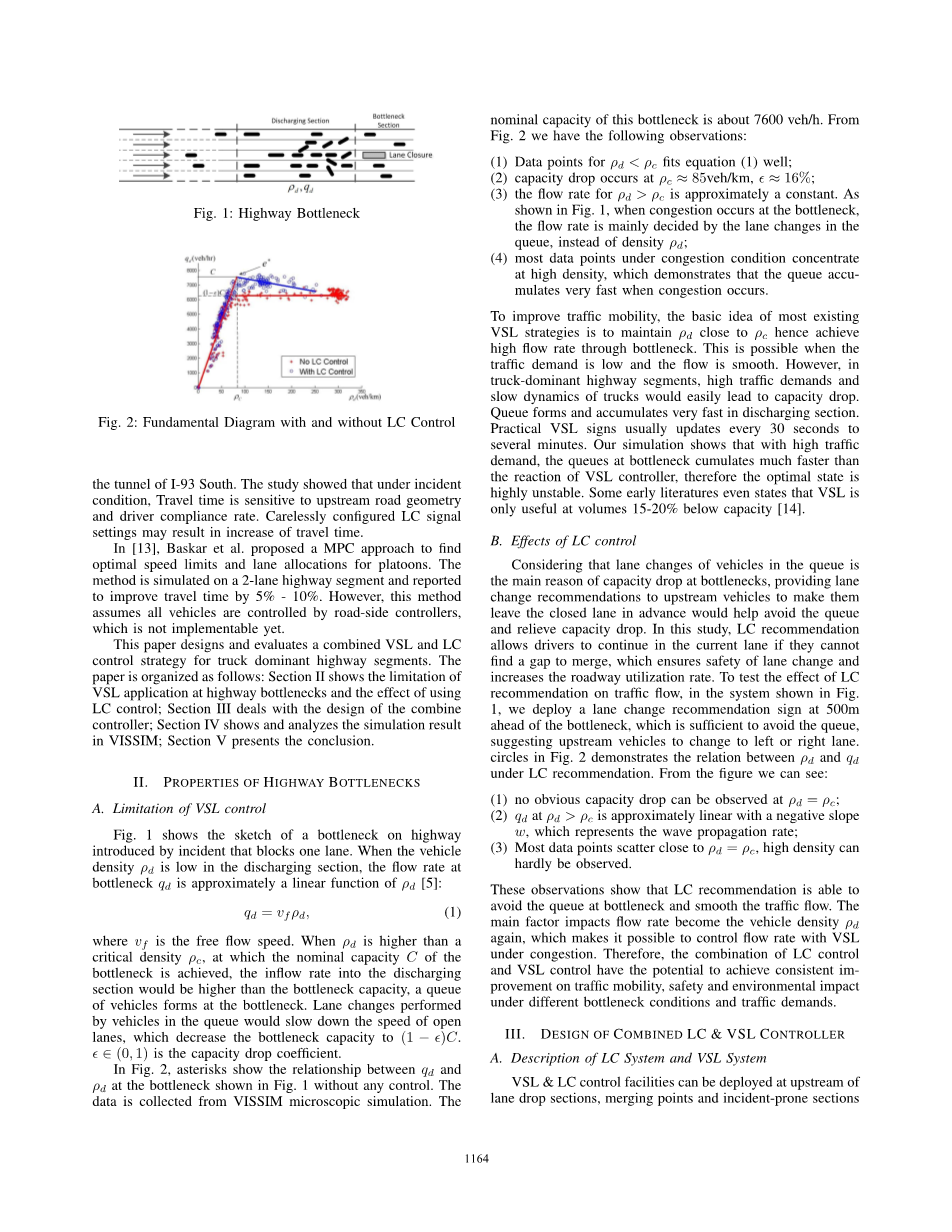
图2:具有和不具有LC控制的基本图
在[13]中,Baskar等人提出了一种MPC方法来寻找排的最佳速度限制和车道分配。该方法在双车道公路段上进行了模拟,并报告了5%-10%的旅行时间。然而,这种方法假设所有车辆都由路边控制器控制,这还不能实现。
本文设计并评估了一种卡车优势公路路段的VSL和LC组合控制策略。论文组织如下:第二节展示了VSL在公路瓶颈处应用的局限性和使用LC控制的效果;第三节介绍了联合控制器的设计;第四节展示并分析了VISSIM中的仿真结果;第五节给出了结论。
2.公路瓶颈的属性
A.VSL控制的限制
图1显示了由阻塞一条车道的事件引入的高速公路瓶颈的草图。当卸料段车辆密度较低时,瓶颈处的流速近似为的线性函数[5]:
(1)
其中是自由流动速度。当高于达到瓶颈标称容量的临界密度时,进入卸料段的流入量将高于瓶颈容量,瓶颈处形成了一队车辆。排队车辆进行的车道变更会减慢开放车道的速度,从而将瓶颈容量降低到。是容量下降系数。
在图2中,星号显示了图1所示瓶颈处和之间的关系,没有任何控制。数据是从VISSIM微观模拟中收集的。这个瓶颈的标称容量约为7600 veh/h。从图2中,我们有以下观察结果:
(1)的数据点很好地符合方程(1);
(2)容量下降发生在,;
(3)的流速近似为常数。如图1所示,当瓶颈处发生拥堵时,流量主要由队列中的车道变化决定,而非密度;
(4)拥塞条件下的大部分数据点都集中在高密度,这表明拥塞发生时队列积累很快。
为了提高流量移动性,大多数现有VSL策略的基本思想是保持接近,从而通过瓶颈实现高流量。当流量需求低,流量顺畅时,这是可能的。然而,在卡车主导的高速公路路段,高交通需求和卡车的缓慢动态很容易导致运力下降。队列形成和积累非常快在放电段。实用的VSL标志通常每30秒到几分钟更新一次。我们的仿真表明,在高流量需求的情况下,瓶颈处的队列堆积速度比VSL控制器的反应快得多,因此最佳状态非常不稳定。一些早期文献甚至指出,VSL仅在容量以下15-20%时有用[14]。
B.LC控制的影响
考虑到排队车辆变道是瓶颈处产能下降的主要原因,向上游车辆提供换道建议,使其提前离开封闭车道,将有助于避免排队并缓解容量下降。在本研究中,LC建议允许驾驶员在无法找到合并间隙的情况下继续在当前车道上行驶,这确保了车道变更的安全性,并增加了道路利用率。为了测试LC推荐对交通流量的影响,在图1所示的系统中,我们在瓶颈前方500m处部署了一个换道推荐标志,这足以避免排队,建议上游车辆转向左侧或右侧车道。图2中的圆圈展示了LC建议下和之间的关系。从图中我们可以看到:
(1)在处可观察到无明显容量下降;
(2)在处近似线性,斜率为负w,表示波的传播速率;
(3)大部分数据点分散在靠近的地方,很难观察到高密度。
这些观察结果表明,LC推荐能够避免瓶颈处的队列,平滑流量。影响流量的主要因素再次成为车辆密度,使得在拥堵情况下使用VSL控制流量成为可能。因此,LC控制和VSL控制的结合在不同的瓶颈条件和交通需求下,有可能实现对交通流动性、安全性和环境影响的一致改善。
3.LCamp;VSL组合控制器的设计
A.LC系统和VSL系统的描述
VSL和LC控制设施可以部署在车道下降区段、合并点和事故易发区段等的上游。图1所示的LCamp;VSL组合控制系统的实例。3.瓶颈上游的高速公路段被分成个长度相似的路段。
图3:LCamp;VSL控制器的配置
LC控制在瓶颈上游的个路段开始时使用架空标志进行换道建议,即第节至第节。对于每条车道,有4种可能的LC建议类型:“直行”、“向左改变”、“向右改变”、“向任何一种方式改变”。LC控制段作为图1中的卸料段。1.该段中的速度限制保持恒定,通常是自由流动速度限制,以确保车辆能够尽快通过瓶颈。
为了帮助提高瓶颈处的流量,VSL控制器倾向于在排放段保持合理的密度。VSL标志,用于通知驾驶员强制的速度限制,部署在第1节至第节的开头。假设传感器在1到部分测量车辆密度,并将信息发送到VSL控制器。中央处理单元实时接收密度信号,并计算每个部分的所需VSL控制命令以供显示。
B.LC控制策略设计
在本研究中,LC控制器的设计包括LC推荐模式的决定和LC控制段的长度。
1)换道推荐模式:车道中适当的换道推荐类型应帮助上游车辆离开封闭车道,将车流均匀地分配到开放车道。因此,LC控制模式是瓶颈形成的函数。假设一般的公路段有个车道,其中车道1(车道)是右(左)最车道。我们使用以下规则为每个车道选择LC建议类型:
(1)对于,如果车道是开放的,“正前方”;
(2)对于(),如果车道关闭,则“改为左(右)”;
(3)对于,如果车道是封闭的,则车道和车道都是开放的, “改为任何一种方式”;
(4)对于,如果车道关闭,则车道(车道)关闭,车道(车道)打开,“改为左(右)”;
(5)对于,如果车道关闭,则车道和车道都关闭,然后我们检查和。如果,则,否则如果,“更改为任何一种方式”。
图4:不同交通需求下的
规则(1)-(5)总是可以从车道1和车道到中间车道,因此是明确的和自我一致的。
2)LC控制段长度:LC控制段长度的决定是平滑换道和容量利用率之间的权衡。较长的LC控制段给上游车辆更多的空间来改变车道,因此进一步避免排队,但导致路面利用不足。直观地说,如果瓶颈处有更多的车道封闭,更多的车辆需要换车道,那么就需要更长的LC控制距离,以提供足够的空间和时间来换车道。因此,LC控制段长度由以下公式决定:
, (2)
其中是在瓶颈处关闭的车道数,是与瓶颈容量和交通需求相关的设计参数。对于特定的公路路段,可以通过模拟找到不同交通需求下所需的的最小值。图4显示了图3中系统不同需求下的最小值。由于LC符号仅部署在各段的开头。我们选择LC控制段的数量,这样,其中表示第节的长度。
C.VSL控制律的设计
1)虚拟坡道计量策略:在VSL控制器的设计中,我们采用了局部坡道计量算法ALINEA的思想。ALINEA调整入口流速,使下游密度保持在期望的水平[15]。我们将其推广到VSL,将每个公路路段视为其下游路段的入口,并用VSL调节下游密度。与坡道计量不同,VSL无法通过停车直接控制流量,因此采用如图3所示的多段结构来保证控制效果。每个部分的VSL控制器有望调节其下游部分的车辆密度。VSL控制律描述如下。设、、表示在时间步骤的第节至第节的平均车辆密度,对于每,第节在时间步骤的VSL命令可以表示为:
(3)
其中为控制周期内段的限速指令,为反馈增益,表示卸料段的临界密度。旨在消除和之间的差异。
图5:系统框图
2)对VSL命令的约束:为了确保安全,我们将以下约束应用于(3)中的VSL命令:
(1)有限命令空间。如果从连续空间获取值,VSL命令将很难遵守。因此,我们将VSL命令(3)中的舍入到整个5 mi/h数,并对其应用下限/上限。这使得驱动程序的命令清晰,并为控制器添加死区特性,因此避免控制抖振。
(2)限速变化饱和。无论是在时间上还是空间上,把限速降得太快都是危险的。减少应该在连续控制期和公路路段之间的一些阈值。如果限速增加,我们不限制限速变化。在这项研究中,(16千米/h)。
因此,虚拟主线斜坡计量VSL控制器可以制定如下:
(4)
(5)
(6)
在(4)中,是将实数舍入到最接近的整5数的运算符。在(6)中,和分别是VSL命令的上界和下界。
D.VSL控制与LC控制的结合
如第III-B节和第III-C节所述,LC控制器是基于瓶颈布局和交通需求设计的。VSL控制器以LC控制段作为卸料段,并在其上游部署VSL标志,以保持期望的密度和平滑的交通流。LC控制器的效果有助于VSL控制器更有效地产生期望的好处。组合VSLamp;LC控制系统的框图如图5所示。
4.评价
A.仿真网络
我们在美国加利福尼亚州一条16千米长的I-710高速公路南行段(在I-105路口和长滩港之间)评估VSL和LC联合控制方法,其静态速度极限为65 mi/h(105千米/h)。长滩港是美国最大的海港之一,I-710高速公路承载着高交通需求和大卡车量。据预测,该细分市场的高峰小时需求约为9000 veh/h,2035年,其中30%将是卡车[16]。考虑到总体需求很大,这是一个非常高的比率。我们在VISSIM建造了这个高速公路网。为了模拟最坏情况,用[17]提供的2014年平均高峰小时数据校准主线和每个坡道的交通需求,但是成比例地增加,使得主线需求在瓶颈处达到9000 veh/h,其中30%是如[16]中预测的卡车。我们假设所有的乘用车都是基于汽油的,所有的卡车都是基于柴油的。VISSIM模型的汽车跟随和变道行为被校准为适度。根据我们的研究,系统性能对VSL/LC组合控制的驾驶行为不敏感。
图6:仿真网络
表I:仿真场景
<t
剩余内容已隐藏,支付完成后下载完整资料</t
资料编号:[237264],资料为PDF文档或Word文档,PDF文档可免费转换为Word

