
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
城市主干道追尾事故的频率-严重度分析方法
摘要:需要对撞车事故和严重程度进行分析,以全面了解任何给定道路的安全状况。碰撞的随机性,伤害对碰撞发生的单向依赖性以及应类型的差异通常导致研究人员开发出独立的统计模型。以进行碰撞计数和严重性分类。遗传算法(GP)方法采用了进化生物学(例如交叉和突变)的概念,可以有效地为两种不同的建模对象提供一种共同的启发式方法。所选择的GP1节点对于重新崩满分类问题具有最高的命中率而对于函数拟合(回归)问题的误差则最小更高的平均每日流量(ADT)更有可能导致更多的崩洪。道路上停车的缺乏可能会导致碰撞造成的伤害严重程度降低,因为与固定的路边物体相比,它们可能会提供“软”的碰撞障碍。输入变量名不相冋的碰撞频率的图形表示法为结果及其解释提供了新的思路。较高的巷道摩擦系数会导致在早晨的高峰时段减少撞车的频率,并且趋势在下午的高峰时段会反转。在30英尺的表值宽度处观察到的碰撞事故最大。敏感性分析结果反映,即天ADT是造成城市动脉碰撞次数变化最大的原因。
诸如中段,信号交叉口和未信号交叉口(进出点)之类道路元素的安全评估包括对事故的严重性和频率的调查。运输安全工程师的目标是减少撞车次数,并减少撞车时的伤亡风险。但是,任何仅针对故障频率或严重性分析的研究可能都还不多。
尽管安全分析的这一方面己被广泛接受,但是现有知识体系对涉及碰撞次数和导致碰撞的伤害严重性的完整分析的引用非常有限。最近Ma等。(2008年)使用多变量 Poisson- lognormal方法来同时模拟在不同损伤程度下的碰撞发生。但是,该研究的综合统计结构使其实施起来不太现实。
碰撞发生现象和伤害严重程度之间的根本区别是反馈的类型。碰撞发生是连续的整数响应,而严重程度则是有序目标。关于这两种现象的大多数统计研究基于这种差异。对于碰撞计数预测,非负二项式例如负二项式( Miaou,1996; Harwood等,2000)和支持向量机(Li等,2008是非节点。在发生损害的情况下,逻辑回归( Huang等,2008; Sze和Wong,2007),二叉树(Das等,2009; Chang和wang,2006),有序概率和对数模型(Das)等人,2008年; Obeng2008年)和创新的比例赔率模型(Wang和 Abdel-Aty,2008年)是标准的建模方法。
在这项研究中,作者研究了遗传算法(GP)刘伤害严重程度和碰撞频率的一般启发式方法。GP将进化生物学的概念(例如交叉和变异)用于模型开发过程。模型演化的过程历经几代人,平均误差的降低是回归的目标函数,命中率的提高是分类问题的目标函数。
车辆碰撞的前部与另一方的后方发生的车道事故被归类为追尾事故( Singh,203年)。目前,研究人员正在研究追尾事故发生的频率和严重性分析,特别是在这项研究中针对城市动脉(非受限通道设施)的事故。尽管它们在本质上是不同的现象但是它们具有一组相互重叠的影响因素。必须理解的是,碰撞发生和伤害严重程度在参考时间框架内是连续的,即它们不是同时发生的。首先,碰撞必须发生,然后可能导致伤害。因此,两个事件之间存在单向依赖性。作者在这里建议在启发式GP的广泛范围内建立碰撞模型的严重性和频率的独立方法。由于碰撞的发生和伤害的严重程度是不同的现象,因此,没有一个模型来管理它们是不现实的然而。在这项研究中,作者针对这两个事件给出了通用的启发式模型开发过程。必须注意的是,撞车原因是发生与伤害程度之间的联系。不同类型的原因可能会对伤害严重性产生影响。
以下部分说明了GP的方法和整体节点发展算法,接下来是结果和分析。在对城市动脉追尾事故进行事故计数建模之前进行伤害严重性分析。数据集准备已包含在相应的分析小节中。碰撞频率分析包括碰撞计数随参数值变化的图形显示。敏感性分析还有助于确定最重要的连续值,从而可以进入最终模型,从而影响事故率的变化。
2.遗传算法(GP)
GP方法论是一种进化算法。起源于遗传算法(GA),成员经过几代进化。生物学的概念,如交叉和突变,是进化过程的中心。通常,在交叉过程中,在某个剪接点,两个同源年代体之间会发生部分互换。另一方面,突变需要改变年代中的任何特定点在GP中,染色体是指用机器语言编写的程序指令( Brameier和Banzhaf 2007)。有关交叉和变异的详细讨论,读者可以参考Holland(1975)和 Goldberg(1989)的著作研究中使用了 Discipulus软件。
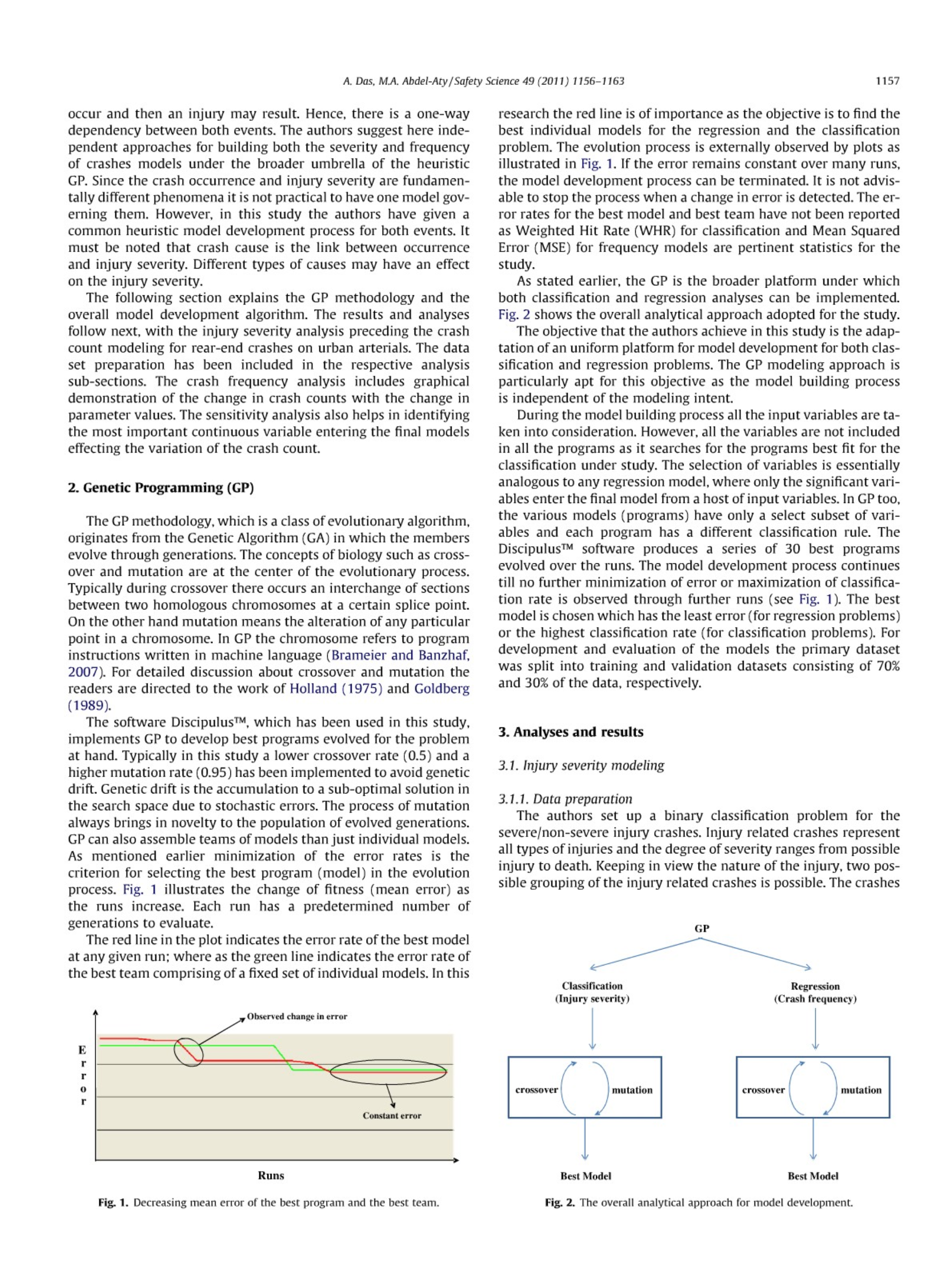
为解决当前问题,GP已发展为最好的程序。通常,在这项研究中实施了较低的交叉率(0.5)和较高的突变率(0.95),以避免运算进入死循环。遗传漂移是由于随机误差导致的搜索空间中次优解的累积。突变的过程总是给进化世代带来新颖性。GP还可以评估多个模型节点而不仅仅是单个节点。如前所述,错误率的最小化是在演化过程中选择最佳程序的标准。图1说明了随着运行次数增加的适应性变化(平均误差)。每次运行都要评估预定的世代数图中的红线表示在任何给定运行中最佳模型的错误率;其中,绿线代表由一组固定的独立模型组成的最佳团队的错误率。在研究红线非常重要,因为目标是找到最佳的回归和分类问题个体模型。如图1所示,从外部观察图的演变过程。如果错误在整个过程中保持不变,则模型开发过程可以终止。当检测到错误更改时,建议不要停止该过程。关于最佳分类和最佳节点的错误率尚未报告,因为分类的加权命中率(WR)和频率模型的均方误差(MSE)是研究的相关统计数据如前所述,GP是哪个更广泛的平台分类和回归分析可以感到高兴。图2展示了该研究采用的整体分析方法。
作者在这项研究中实现的目标是适应用于分类和回归问题的统一模型开发平台。当模型构建过程与建模独立时,可使用GP建模方法。
在构建过程中,所有输入变量都将被纳入考虑。但是,所有变暈均未包含在所有程序中,因为它会搜索最适合所研究分类的程序。变量的选择基本上与任何回归模型相似在回归模型中,只有重要变量才从大量输入变量进入最终模型。在GP中也是如此,各个模型(程序)只有一部分变量,每个程序都有不同的分类规则。 Discipulus软件可生成一系列在运行过程中演变而来的30个最佳程序。模型开发过程一直持续到通过进一步的运行未观察到进一步的误差最小化或分类的最小化(见图1)。选择具有最小误差(对于回归概率)或最高分类率(对于分类问题)的最佳模型。为了开发和评估模型,将原始数据集分为训练和验证数据集,分别包含70%和30%的数据。
3.分析和结果
3.1事故率模型
3.1.1资料准备
作者针对严重/非严重伤害事故设置了一个二元分类问题。与伤害有关的碰撞代表所有类型的伤害,严重程度的范围从可能的伤害到死亡。考虑到伤害的本质,有可能将与伤害有关的分为两个可能的组。碰撞死亡和致残的伤亡被归为一起。他们把她带入一个层次的撞伤致残的伤残很容易是致命的,反之亦然,这可能是由于受试对象的脆弱性所致(Das等,2008)。其他级别包括可能造成伤害的撞车事故和非因伤致死伤害。类似的论点是,可能的伤害很容易是非伤害性伤害,反之亦然,具体取决于主题涉及导致我们将这两个类别归为一类。图3显示了二进制 split,它用作分类问题的变量。它应该注意那的属性仅(PDO)事故通常未被充分报道(Abdel-Aty和 Keller,2005:Yanlamoto等,2008),该研究未包括在由于坠毁发生在长度不等的城市主干道上。因此,在对严重/非严重伤害事故进行分类之前,必须先已分为以下四组:组1(1.009-2.89英里);组2(98-5.729英里):组3(5.762-10.556英里);组4(10.64478.293英里)。根据围绕 Medoids(PAM)算法的分区( Kaufman和 Rousseeuw,199)发现了最佳的组数。特定的道路几何和设计因素已在此特定类的研究中使用,其信息可完全获得(表I)。这些变量被重新用于工程研究,以开发安全计数方法。这些变量中的许多已被收集,并且是该分类研究所独有的本研究使用了2004年至2006年的57,155起追尾事故。该数据是从弗罗里达交通运输部门的碰撞分析报告(CAR)系统中检索的,该统存储了所有电子碰撞数据,这是佛罗里达州最完整的碰撞数库。也可以将其与道路设计数据合并,以获得更完整的数据库端碰撞的选择基于事实,即它是最常见的碰撞类型。由于必须足够的数据点来训练由遗传程序(GF)开发的模型,因此也做出了此决定。这项研究的目的是调查是否可以将GP用作频率估计严重性分类的共同启发式模型开发过程。该方法可以应用于频率合理的任何类型的碰撞,并且作者选择了第一频率类型来证明该方法多数二进制变量是虚拟变量,它们虚假地代表了原始名义变量的特定方面,因此,分类的结果可能会被直接指出。表I中对变量16至20的描述具有受限制的中位数或非限制性中位数类型。限制性是那些在相对的行车道之间提供物理屏障。作为非限制性中位数的是那些不提供物理屏障的给画媒介或中心线。这包括双向左转车道。表1中的变量55到57传统参数提供了一些新的创新形式。传统上,研究人员使用点位置变量将碰撞分配给三个道路元素(段,在路段和未信接入点))。但是,对数百份碰撞报告的详细审查表明,其“站点位置”变量本身对于所在地区来说是一个较弱的指标。例如,可以观察到,裂缝可能不会被刻蚀为一个已终止的标志即使它可能已经非常接近一个标志也是如此。到目前为止,“交通控制”与“现场位置”相结合,以及是否存在信号的信息。在三车道事故之一中发生车祸时表现出色。基于这三个独立参数, Paralneters创建变量ele1,ele2,ele3来分配给三个巷道元素即段相交和接入点(Das等,2009)。
3.1.2.后端分类模型
如上一节所述,对于分类问题,最好的程序具有最高的分类率。对于分类问题,通常会为每个最佳程序提供“1级命中率”、“0级命中率”和“加权命中率(WR)”。在本研究中,WR已被用作选择赌注分类模型的依据。WR类似于信号检测理论的经典著作中的正确“命中”。报告的WR始终是有效的验证数据。
图4显示了严重/非严重撞车分类的结果。在组1中(WHR=91.8455-相当于91.85%的正确分类/预测),与路段V55以及具有路缘的道路相关的车祸导致严重程度增加组3(WHR=91.4834)中,只有草坪存在(V55)降低碰撞严重程度。1号草坪通常是宽中位数。更广泛的方法可以降低碰撞率(Gettis等,2005)。草坪中位数的存在可能使驾驶员在尾部碰撞事故迫在眉睫的情况下转向草坪。这与 Cluster1中得出的结果不同,路缘和草坪中位数增加了严重性。路缘石的存在使驾驶员很难有效地利用均值空间效应来避免驾驶员产生碰撞。这可能是为什么碰撞会导致组I的严重性更高的原因,更高的碰撞速度也可能是造成更高伤害等级的另一个因素。在组4中(WHR=89.4289),观察到V31 (ADTgt;=52,000)导致严重的碰撞增加。32%的车速超过38英里/小时,因此表明有大量车辆以较高的速度行驶。因此发生碰撞更高的速度更可能导致严重的车祸。这表明较高的速度变化。对于大多数较慢的车辆(lt;38mph),由于驾驶员试图通过相对低的速度而表现出的侵略性行为,可能会导致严重的车祸。 Nevarez等人(2009年)发现每个车道的ADT与撞车严重程度显着相关。 Pande和 Abdel-Aey(2009)的研究还发现,严重的追尾事故与ADT有很大关系。在这项研究中,一个可能的解释可能是由于追尾发生在高速动脉。除此之外,还必须注意,追尾的严重程度并不完全取决于外部因素。车辆相关行为学明显地与追尾的损伤严重程度相吻合(Warner,2008)。有趣的是,没有停车位严重程度会减低。
3.2碰撞频率模型
3.2.1.资料准备
由于发生碰撞是随机事件。所有因素都保持不变,任何定的点都具有相同的发生碰撞的可能性。因此,与隧道不同,作者将城市动脉分为长度为0.5尼的均等部分为分类问题做好准备。在这部分研究中,仅使用了特定的巷道几何和设计因素的信息。完全可用。没有碰撞的隧道也包括在内。对于那些隧道段的交通和道路几何参数,没有可用的数据,已经在可用范围内随机生成了数据点。表2列出了此分析中使用的所有变量。
3.2.2追尾事故率模型
通常用于回归分析的R值和错误率已报告。在这项研究中,研究人员选择了误差最小的模型。同时程序具有最高的R值。对三个不同的站点位置进行了追尾分析,即:(1)段;(2)信号交叉口;和(3)接入点。信号交叉口相关和访问点相关的碰撞每种碰撞类型都可以更好地评估安全状况而不是仅对所有道路元素使用一个模型。例如,中段路段和信号交叉口的追尾事故,可能具有相似的重要变量集,但模型形式可能不同。一种模型形式的单边假设足以说明在所有位置发生碰撞的现象,这虽然使问题坐立不安,但却无法理解。本研究中使用的GP方法使作者能够为不同的道路要素建立不同的模型。
方程式中给出相关的碰撞模型。(1)揭示了碰撞发生现象的多重结构。该模型的MSE为11.234。
对于由方程式给出的以上GP模型。(3)MSE为10.264。
ADT(V3)在所有三种车型中均具有显着性,同时还具有干燥的水分条件(V6)和日光条件(V7)千燥的地面条件可能表明天气睛朗,道路上车辆较多。因此,不当的操作可能会导致碰撞事故的发生。研究表明,湿滑的路况会导致较高的遊免撞车事故的可能性,因为在不利的情况下,驾驶者会谨慎驾驶1圈(Yan等人障碍物(V11),并且白天时的追尾频率会增加,但在有信号的交叉点处不会增加。当ADT升高时,频率不变。在ADT变化不大的任何路段上结果可能难以解释。然而。相比于信号交叉口附近,这会增加碰撞风险( Pandeetal。,2005)。ADT加上速度差异可能是观察的可能原因。观察到早晨和下午的高峰
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[237265],资料为PDF文档或Word文档,PDF文档可免费转换为Word

