英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
毕业论文(设计)
英文翻译
原文标题 Multi-body Motion Modeling and Simulation for Tilt Rotor Aircraft
译文标题 倾转旋翼飞行器多体运动的建模与仿真
倾转旋翼飞行器多体运动的建模与仿真
Li Haixu, Qu Xiangju*, Wang Weijun
航空科学与工程学院,航空航天,北京大学,北京100191,中国
摘要:以前的研究中的倾斜转子飞机建模的空气动力计算复杂,对运动方程的研究往往不得不频繁使用简单的自由度(DOF)刚体方程。然而,在过渡阶段飞机的变形,是复杂的气动干扰和重心(CG)的变化。此外,通过倾斜的高速旋转产生的陀螺力矩转子严重干扰飞机姿态。上述六单刚体方程不带惯性过渡中的耦合效应。为此,本文推算人体,是发动机舱和转子独立实体,以多体运动方程的形式建立一个真实的模型。首先,通过应用牛顿定律飞机的一个质量要素的角动量定理,以及惯性系中的多体运动方程在车身框架中,通过整合所有元素。作为方程的隐式非线性微分类型,一致的初始值问题应该得到解决。然后,对微分方程进行了数值模拟对Runge-Kutta-Felhberg积分算法。对数据的建模和仿真算法进行了验证对XV-15为例。该模型可用于飞行动力学、飞行控制和倾斜旋翼飞机飞行安全等方面。
关键词:倾转旋翼飞机;多体动力学;运动建模;飞行动力学;仿真
1 介绍
通过倾斜的机舱和转子系统,倾转旋翼飞机可以在直升机上飞行模式在飞机模式。因此倾斜旋翼飞机有飞机和直升机的优点:较高的巡航速度,垂直起飞能力,着陆(VTOL)和徘徊,这将打开它军用和民用的光明前景。
复杂的控制系统,使倾斜转子飞机虽然有能力在空中飞行,但仍然有大量的问题没有解决。美国的倾斜转子飞机的诞生地见证在过去五年发生的几起事故。例如,在开发过程中V-22,四崩溃了就是真正的罕见纪录航空史。V-22飞机的调查美国航空航天局领导的崩溃已经发现了大量的航空机械安全问题,威胁的可行性倾斜转子飞机[1]。因此,在国内或国外的航空科学研究倾斜转子飞机早已成为一种普遍关注的问题。
飞行动力学建模与空气动力学特征模型和飞机运动模型相关。在机舱和转子装置飞行模式系统中,作为一个独特的功能,倾斜转子飞机的需要控制悬停模式与向前的过渡。在这个过程中,飞机的变形不仅造成空气动力干扰,而且还会产生惯性耦合问题。因此,两者的气动特征与飞机运动模型倾斜转子飞机有特别的复杂性。有许多的研究在家里和国外,而对后者不足。例如,文献[2]-[8]为主要研究气动倾转旋翼机干扰。文献[ 9 ] - [ 10 ],由推算转子的叶片是独立的实体,转子裸气动特性更确切地说。然而,这些作品通过了飞机,通过自由度描述运动模型(自由)刚体方程(或为简单起见)干扰线性方程组,忽略了在发动机舱和高速倾斜影响造成的CC by-nc-nd许可下的开放存取。旋转的转子。然而,两舱处于巨大的失重和承受高幅值的变化。这个一般用飞机运动模型不能反映无倾斜转子飞机的基本特征考虑到它们的影响。因此,这本文建立了一个更现实的模型,提出了建议多体运动方程组飞机机身、机舱和转子作为独立实体。这种模式的特点是不只是越来越多的自由度和方程,但也在形式上赋予方程。与建议以模型为基础,本文提出了方法进行隐式模拟基于数据的非线性运动方程XV-15倾转旋翼机结合的结果。
2 框架和假设
2.1 符号
(1)矢量
对于一个向量,下标表示它的目的地和原点和标的投影参考框架。
(2)矢量坐标分量
对于一个向量,其组成部分在一个坐标系统,可以写成
(3)质量和惯性
下标表示实体,如转子,发动机舱和身体。
(4)坐标变换矩阵
对于矩阵,它的下标表示目的地框架和原点。更多关于他们的定义、参考文献[ 11 ]。
2.2 参考帧
用于描述该位置和倾斜转子飞机的姿态定义如下,而其他则类似于共同飞机[ 11 ]。本文所采用的参考帧右手规则。
- 地球的框架FE(OE xE yE zE)
其基准点和轴的定义在参考文献[ 11 ]。地球被视为一个固定的单位在惯性空间。
- 车身骨架FB(OB xB yB zB)
它的基准点与重心重合(CG)排除短舱机身和转子。箭头方向如下文献[ 11 ]中定义。
- 吊篮架FN(ON xN yN zN)
机舱框架与机舱连接牢固,而它的基点上恰逢CG机舱。轴的轴线位于机舱点前,轴YN的权利。可以建立轴心的方向。
- 转子框架FR(OR xR yR zR)
转子架与转子的基点或符合CG连接牢固机舱。轴的轴锆是在飞机上旋转。轴线保持垂直向上和XR点到旋转平面。
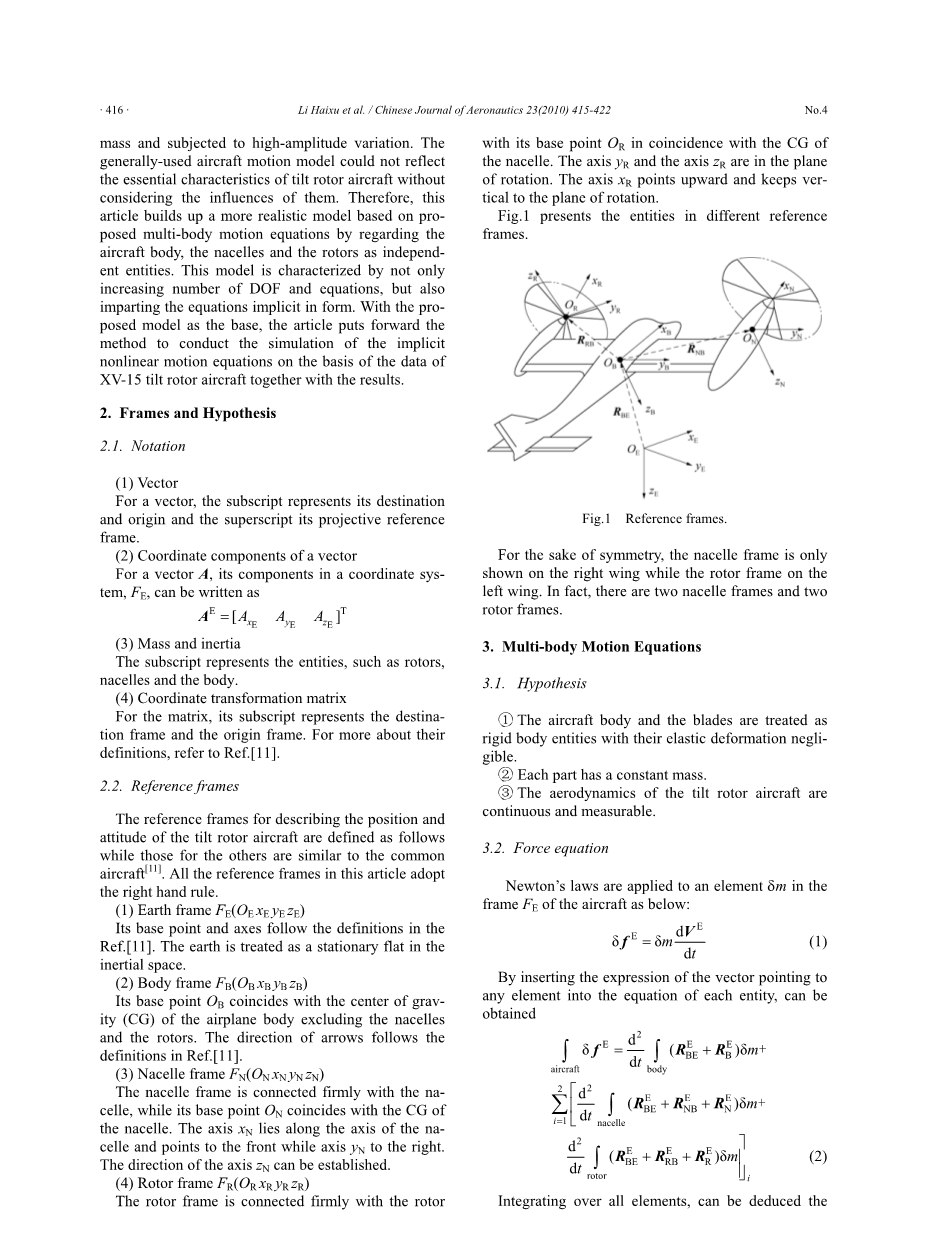
介绍在不同的参考fig.1 the entities帧。
Fig.1 参考帧
对于对称的缘故,吊篮架只在机翼上显示的是转子的帧左翼。事实上,有两个吊篮框和两转子框架。
3 多体运动方程
3.1 假设
①机身和叶片被视为具有弹性变形的刚体实体可以忽略不计。
②每个部分都有一个恒定的质量。
③倾转旋翼飞机的空气动力学连续可测。
3.2 力方程
牛顿定律是应用于一个元素delta;飞机的框架结构如下:
通过插入载体的表达任何元素进入每个实体的方程,可以得到的
整合以上所有的元素,可以对整个飞机的受力方程推导如下
基于向量导数原理的力方程可以导出在身体框架如下:
3.3 矩方程
应用角动量定理帧中的铁元素delta;飞机,可以获得:
在delta;M1是对元素的时框架铁基元。然后通过整合所有元素,可以实现
M1在式(5)是飞机的一刻框架式铁基点,M1(5)可以分为2个部分:飞机的瞬间框架的基础点力矩FB。插入力FB为式(5)可以得到
使用I作为惯性算子[ 12 ],角动量组件在式(5)可以得出如下
通过插入式。(6)-(7)代入式(5),那一刻在框架铁的整个飞机的方程可以收购
也来自于向量导数的原理,矩方程可以导出在身体框架如下:
3.4 运动方程和几何方程
为了使方程组变得封闭可解的,应补充的运动方程和几何方程,它定义的坐标
飞机位置转换(X,Y,Z的RBE),态度ETheta;是(psi;,theta;,phi;),速度VBE(U,V,W)和角速度Bomega;(P,Q,R是)。方程的推对于倾斜转子飞机是相同的一般飞机[11]。
整个飞机的旋转运动方程是
在EB L′可表述为[ 11 ]:
该吊舱的几何方程
转子的几何方程
4 模型分析与仿真算法
4.1 封闭模型
上面提到的力和力矩可以用向量形式表示如下:
在delta;R表现手法中的变拥有通用飞机,其中包括舵,电梯,副翼和加速器;delta;倾转旋翼机的特殊操纵变量,其中包括叶片角度、转子转速nomega;Nb和短舱omega;Rb。
如图所示,多体运动模型
图2模型方程组。
倾转旋翼飞机由六个矢量构成涉及八个向量的方程组:BVBE、Bomega;,RBE、ETheta;,
RNB,BRRB,delta;R,delta;T,在delta;T指令自动或实时的指飞行员在循环。因此,只有六未知数,这意味着该模型是可解的。
4.2 模型形式
从方程组,可以看出倾转旋翼机的数学模型是不同的从普通飞机上。
对于通用飞机,飞行动力学模型可以用一阶显式微分方程描述作为
其中x(t)= [ X1(t)x2(t)hellip;xn(t)] T是状态向量u(t)= [(T)U1 U2(t)hellip;嗯(T)]的矢量控制。如果初始状态x0 x1 = [(0)(0)x2hellip;xn(0)和U(t)]给出的时间依赖状态向量(t)实现。
然而,对于倾斜转子飞机,它是很难将飞行动力学模型转换为显式差分方程。这是因为有必要的考虑多的惯性耦合效应—身体系统的发动机舱和的影响转子在解决机身旋转造成的机身的质心运动,和相同的质心运动的影响,在解决机身旋转。数学公式以加速度和共存为特征的在力方程的角加速度(Eq.4)和弯矩方程(eq.10)。因此,飞行倾斜转子飞机的动力学模型可以描述由下面的隐式微分方程:
4.3 仿真实现
作为倾斜转子的内隐式微分方程飞机不能用一般的方法模拟用参考文献[ 13 ]方法。
要解决方程,初始条件应不仅包含初始状态向量值x0,但又是初始微分系数的值向量x0。此外,初始条件必须一致的,这意味着只有未知的(0)在【X1 X2(0)hellip;xn(0)]和[ X1(0)(0)x2hellip;xn(0)]那是独立的。和其他未知的可以发现自己的方程。因此,初步差分系数值模块设置[ 13 ]。该方程可以解决的
龙格-库塔-费尔贝格积分方法[ 13 ]。结构仿真由六大模块组成如图所示。
图3结构仿真。
5 典型的仿真结果
为了验证模型,典型的模拟正在进行的。第一个是证明它的正确性通过模拟多体模型在飞机上模式,它是等于单一的刚性模型,和比较它与以前的单刚性模型。其次,通过对多体模型的仿真,提出多体模型的优点—过渡模式下的人体模型。原始数据从美国航空航天局的报道,美国贝尔301倾转旋翼机(对XV-15原型)[ 2 ]。
5.1 飞行模式
模拟飞行模式的倾转旋翼飞机,在机舱的角度固定在0°,初始条件如下:巡航速度为100米/秒的速度和3公里的高度,3.3角的攻击和415 2推力。对电梯的俯仰响应速度(1°)给出了图.4-5。
图4短周期俯仰角速度响应。
图5沥青反应的长周期率
仿真结果表明了该模型的速度具有典型特征的沥青响应长周期和短周期模态模式。像飞机,他们与以前的协议很好仿真[ 5 ]和实验结果[ 8 ]。
5.2 过渡模式
迄今为止在家里进行的研究国外的倾斜转子的动态特性飞机在过渡期间大致描绘为静态特性的一系列固定机舱下一个刚体模型的角度。例如,在参考文献[ 14 ],获得纵向杆位置xlon在转型过程中,不同的空速XV-15的VA模式下,有必要对数据进行一系列的计算固定角度theta;机C、瓣角测向然后获得的近似特征整个过程(见图6)。文献[ 15 ],以模拟XV-15徘徊在400米的过渡高度和6(或)的倾斜速度,需要计算国家在每个前缀短舱倾角和获得随时间变化的高度(H)曲线如图所示图7,其中12-26间隔时间的过渡持续时间。
图6特征曲线在不同的机舱角度。
图7近似模拟过渡过程。
在这篇文章中,提出的多体模型使有可能进行直接和连续模拟。figs.8-13目前的仿真结果
在机舱的角度theta;过渡XV-1C从90~0~不等。假设徘徊在400米作为初始状态的高度,转子开始倾斜6(°)/ s的速度如图所示。
图8机舱角曲线。
图9攻角响应曲线(机身)。
图10角速度响应曲线(机身)。
图11机身方向响应曲线图。
图12速度响应曲线(机身)。
图13 机身位置响应曲线图。
从图中,可以看出,俯仰角在过渡开始时下降约10个,这相当于“鼻子血统”的XV-15。“鼻子下降”的原因是拉绳不经过过渡[16-17]身体重心显示图。
图14鼻降机制。
从figs.
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[29701],资料为PDF文档或Word文档,PDF文档可免费转换为Word

