智能停车系统
Shital N. Shinde S. S. Chorage博士
ME学生,(VLSIamp;嵌入式系统) ENTC部副教授
Bharati Vidyapeeth女性工程学院, Bharati Vidyapeeth女性工程学院,
浦那 - 43,印度马哈拉施特拉邦 浦那 - 43,印度马哈拉施特拉邦
Shital.shinde147@gmail.com sschorage@gmail.com
摘要——本地化是引导无人驾驶地面车辆到智能化空间的导航系统的关键。智能空间是一个环境系统。这个智能空间能够支持信息和物理方法。所提出的系统包括传感器信息融合,位置估计,路径规划和跟踪。相机用于获取机器人的图像信息。图像处理和FPGA嵌入到一起非常正确且准确地识别UGV的位置和方向。提出的分布式图像处理像素结构将使通过通信网络传输的数据量最小化。这非常合理高效的解决方案,简单,适应性强。在此文件中描述的硬件/软件本地化设置便宜且易于使用,并可在一些工业和国内的场景中提供支持。
关键词——FPGA,图像处理,智能空间(iSpace)
一、导言
由于新开发的技术,人类正领导舒适生活。虽然新技术有助于生活舒适,但有时会变得麻烦。对于例如使用自己的汽车的人数日益增加。所以停车场成为一个巨大的问题。为了自动化停车并减少驱动程序的工作量使得引入这样一个自动定位汽车的系统是必要的。多年来已经提出了几种方法来解决这个本地化自主移动的问题 [1].这种移动机器人可以远程控制半自动或自动性。本地化是解决机器人在操作环境中进行本地化以及他们如何了解自己组建团队的个人姿势的关键技术 [2].不同的关于机器人定位的技术文献被提出了。这种机器人用于室内环境,如医院,机场,购物中心以及工业储存厂或自动停车场甲板。
智能空间(iSpace)是由东京大学的Lee提出 [2]。智能空间与分布式传感器、处理器相互作用,物理连接空间之间的信息技术通过通信网络来相互连接。由于这种不同模块允许UGV在感兴趣的区域进行指导的通信网络。不同的模块在iSpace的帮助下被结合起来指导UGV。
这里主要解决智能停车场系统的两个问题:
1]识别汽车的位置和方向以进行汽车自动定位。
2]开发一种能够实时控制给定时间内出现的UGV的控制系统。
本文重点关注第一点。提出了一种基于现场可编程门阵列的嵌入式UGV室内定位视觉系统,该系统的性能和精度均优于现有的复杂系统。
本文详细安排如下如下。第一节介绍,文献综述见第二节,建议的系统见第三节,最后第四节对全文进行了总结。
-
文学调查
J.Rodriguez-Araujo,et.al. [1]描述了UGV的精确定位和快速同步评估协调和位置。这可以借助图像处理系统和FPGA的帮助来实现。 定位是基于分布式图像处理系统,这增加了动态响应,因为通过通信网络传输的数据量最小。结果表明,与现有的复杂度相同的解决方案相比,该系统具有更好的性能。
J.Lee[2] 提出了这样一种由分布式传感器组成的智能空间的架构。iSpace有助于减少人力,提高工作速度和高吞吐量。建议的架构是可重新配置,模块化和易于维护。不同的传感器分布在空间之中,它们基于位置信息提供功能。
E.DiGiampaolo,etal.[3] 用射频识别(RFID)标签描述全球定位系统。这种RFID标签被放置在这样一种方式,它可以被行驶在其下方的无人地面车辆识别。提出的系统只有在检测到RFID标签后才能工作。采用合适的标签天线在超高频频段进行RFID检测是可行的。利用卡尔曼滤波方法找到规则稳定的RFID检测区域是有必要的。提出的系统使用非常合理的,易于处理和在一些工业和国内场景提供满意解决方案的硬件/软件。
H. Chen等.[4] 提出了一种基于为解决全球定位和多机器人系统的定位和映射措施的视觉方法。基于马赫的方法用于找出机器人之间的相对姿势。为了实现全球定位目标使用了三种主要策略。第一个策略是基于相对姿势在全球范围内定位其他人机器人。第二个策略是每个机器人本身的实现。在第三种情况下使用安装的公共SLAM服务器在其中一个机器人中同时定位所有其他机器人。
-
拟设系统
本文提出了一种基于机器人规划路径最短技术和跟踪控制算法的模型,实现了系统的自动定位。本文由用于本地化机器人的用户交互界面、图像处理、路径规划和路径跟踪组成。图1显示了这个提出的整体结构系统。
相机
红外传感器
射频质子
FPGA
个人电脑
直流电机
直流电机
图1智能停车系统框图
智能停车系统的工作分为以下两个部分:
第1部分:
图像处理
路径规划
图2空间模型的识别
在这项工作中,机器人被附有白色的板子的红色的标记做了标记。标记物的红色与白色支持板之间存在高度的差异。相机是以垂直于地板的方式放置。红色标记的使用是为了成功的简化姿势评估的处理。
1.图像处理:
这个智能停车场的主要图像处理任务系统在以下不同部分描述。
A.图像捕获
B.识别顶点
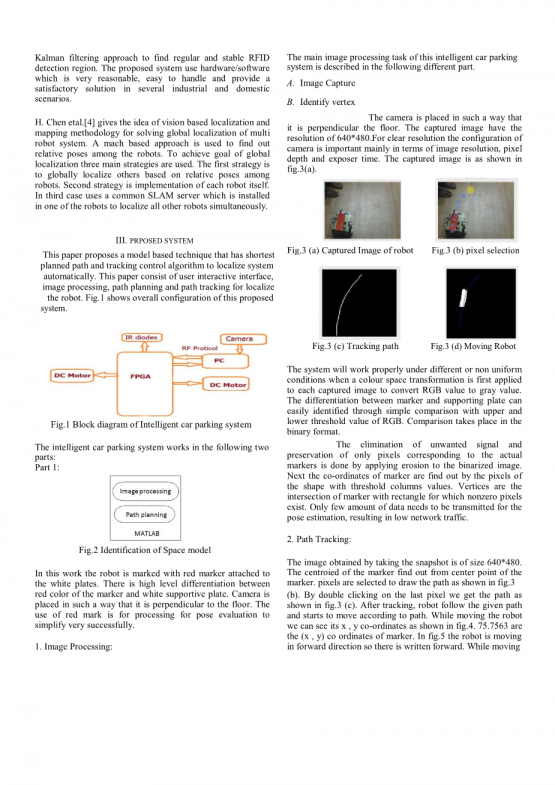
相机是以垂直于地板的方式放置。捕获的图像具有640 * 480定分辨率。为了获得清晰的分辨率,相机图像分辨率、像素深度和曝光时间方面的配置很重要。捕获的图像如图3(a)所示。
图3(a)机器人的捕获图像 图3(b)像素选择
图3(c)跟踪路径图 图3(d)移动机器人
在不同或不一致的情况下,当对每个捕获的图像进行颜色空间变换,将RGB值转换为灰度值时,系统将正常工作。标记和支撑板之间的区别可以通过RGB上下限阈值的简单而很容易识别出来。 比较发生在二进制格式。
通过对二值化图像进行侵蚀,消除不需要的信号,只保留与实际标记相对应的像素。接下来,标记的坐标通过像素来找出具有阈值列值的形状标记的坐标由具有阈值列值的形状像素求出。顶点是标记与存在非零像素的矩形的交点。姿势估计只需要传输少量数据,使网络流量低。
- 路径跟踪:
抓拍得到的图像大小为640*480。标记的中心从中心点发现
标记。选择像素来绘制路径,如图3(b)所示。通过双击最后一个像素,我们得到如图3(c)所示的路径。跟踪后,机器人遵循给定的路径并开始按路径移动。在移动机器人的同时我们可以看到它的x,y坐标,如图4所示。75.7563是标记的(x,y)坐标。在图5中,机器人正在向前方移动所以向前写。在移动的同时那里的车辆显示它的方向,向前、向左、向右或后退的文字。
图4图像处理和路径跟踪的总视图
第2部分:
直流电机移动
循迹
图5自动定位模型
拟议的系统以基于FPGA的分布嵌入式系统的形式设计,如图5所示。 相机附在PC上。捕获的图像在MATLAB中处理,如第1部分所述。图像处理后跟踪信号通过RF协议从PC传输到FPGA。 PC与FPGA之间的主要通信通过RF协议进行。RF协议的范围是30米,频率为2.4 GHz。从PC传输到FPGA的数据采用字符串形式。字符串长度为8位。
-
DC电机运动:
直流电机根据FPGA从PC接收到的信号来移动。当收到“F”信号后,直流电机向前移动,收到“L”、“R”、“B”信号分别向左、向右、向后移动。直流电机的所有控制仅通过FPGA发生。电机适用于不同的信号和不同的电压供应,如表1所示。模拟前、后、右、左的结果如图6所示。
表1
|
直流1 |
直流2 |
|
|
信号 |
VCC1 GND1 |
VCC2 GND2 |
|
F(向前) |
1 0 |
1 0 |
|
B(向后) |
0 1 |
0 1 |
|
R(向右) |
1 0 |
0 1 |
|
L(向左) |
0 1 |
1 0 |
图6不同信号的仿真结果
2.跟踪和障碍物检测:
根据给定的路径,机器人将如图4所示移动。在移动车辆时,如果在机器人前面的有任何车辆,它由红外传感器检测。当红外传感器检测到障碍物将发出信号1时传送到车辆。接收信号1后,FPGA停止运行机器人。移除障碍物后信号0发送到FPGA,机器人再次开始运行。
最后,利用FPGA实现智能停车系统成功实现。该系统集成了基于图像的解决方案所以数据处理量很大。因此一个简单的微控制器不是处理它的选择。这个FPGA有助于提供车辆之间的可行通信。关于FPGA的另一件事是它的可重配置功能。FPGA的主要优点是顺序实现这些步骤。在这种情况下,从相机接收像素处理后无需将整个图像存储在内存中,因此在不使用内存的情况下,该系统采用先入先出的原理,在接收和侵蚀过程中临时存储图像。
表2
FPGA资源使用情况
|
资源 |
可利用的 |
使用流 |
比例 |
|
寄存器片数 |
11440 |
142 |
1% |
|
LUT数目 |
5720 |
395 |
6% |
|
应用片数 |
1430 |
113 |
7% |
|
绑定IOB数 |
102 |
6 |
5% |
整个模块的总流量如图7所示。彻底分析流程图和设计特点后,编程代码采用FPGA上实现的verilog HDL语言编写。用verilog代码还编写了MATLAB代码进行图像处理。图像捕获、跟踪机器人和障碍物检测任务是监测成功的重心
图7

英语原文共 4 页
您可能感兴趣的文章
- 拟人手臂的轨迹规划与轨迹跟踪控制外文翻译资料
- 新型磁性辅助内窥镜系统在上消化道检查中应用的可行性 和安全性外文翻译资料
- 基于FPGA可编程逻辑器件的复合视频图像处理外文翻译资料
- 从被测的高频域原始信号中提取巴克豪森噪声外文翻译资料
- 重型机床z轴热误差混合建模方法外文翻译资料
- 一个红外浊度传感器:设计与应用外文翻译资料
- 用于控制食物烹饪过程的电子系统.外文翻译资料
- 关于液体介质中电磁流量计的设计和理论上存在的问题。第二部分:关于带电粒子产生的 噪声理论外文翻译资料
- 基于LabVIEW和Matlab的小波变换对非平稳信号的分析仿真外文翻译资料
- 应用于腹腔镜手术的新型膜式加热加湿器 的开发外文翻译资料

