基于语音识别和触摸屏控制的截瘫患者轮椅
Aruna.C1, Dhivya Parameswari.A1, Malini.M1, Gopu.G2.
1生物医学工程系项目组学生
2生物医学工程系教授兼系主任
Sri Ramakrishna工程学院,哥印拜陀-641022
E-mail: gopu.govindasamy@srec.ac.in, dhivyaparameswari@gmail.com.
摘要
由于事故,年龄和健康问题,截肢和感官系统缺失的广泛出现已经成为当今社会关注的主要问题。为了帮助有这些缺陷的人所提出的智能轮椅系统是在熟悉的环境中使用双重控制进行导航。其两种输入控制模式分别是语音识别控制和触摸屏控制。当你想要改变轮椅的方向时,触屏传感器通过手指按压触屏上的不同象限来建模,而触摸屏上为不同方向设置了不同的值。同时也可以通过使用语音控制器的简单语音命令来控制方向的改变。在语音识别芯片中将每个方向的控制存储为一个字母,大大缩短了识别时间,从而可以实现快速到达目的地。轮椅的后部安装了直流无刷电机并采用PWM技术控制。同时设有制动控制机构以控制轮椅。从以往的文献调查中发现,触摸屏的准确率大约为50%。在本文所提到的系统中实现了轮椅全方位运动,精度达到了94.6%,语音识别的准确率为80.8%,比Prathyusha等人的研究高出30%。该装置通过室内系统中的预定义路径,帮助残疾人自动向目的地前进。
关键词:PIC单片机,触摸屏,PWM技术,截瘫,轮椅
Ⅰ介绍
在物理和社会环境中,执行任务、活动和角色时,期望达到预期水平的无力或限制在一个名为康复技术[1]的常绿领域的帮助下得到了最大限度的解决。为了帮助提高他们的生活质量,已经开发了各种各样的辅助设备和现代化设备。这项技术是残疾人融入社会的一种助力。麻痹是指一个或多个肌肉的肌肉功能丧失。如果身体存在感觉损伤以及运动损伤,瘫痪将会伴有受影响区域的感觉丧失。截瘫是下肢运动或感觉功能的损伤。它通常由脊髓损伤或先天性疾病如影响椎管神经元的脊柱裂引起。截瘫影响到的椎管区域主要是胸椎,腰椎或骶骨区域[2]。本文所提出的系统通过辅助智能轮椅系统帮助人们更容易地克服这些缺陷[3,10]。在所设计的双输入系统中,使用有6个象限的5线电阻式触摸屏,和由12个开关组成,其中4个开关用于方向控制,1个开关用于停止轮椅的语音识别芯片(HM2007)。此外,还提供制动控制开关以避免碰撞。为了实现轮椅所有方向的移动,微控制器采用一系列数字值进行编码。
本文的结构如下:系统框图,工作方式,算法,材料与测试方案,结果与讨论,结论与未来范围。
Ⅱ系统框图
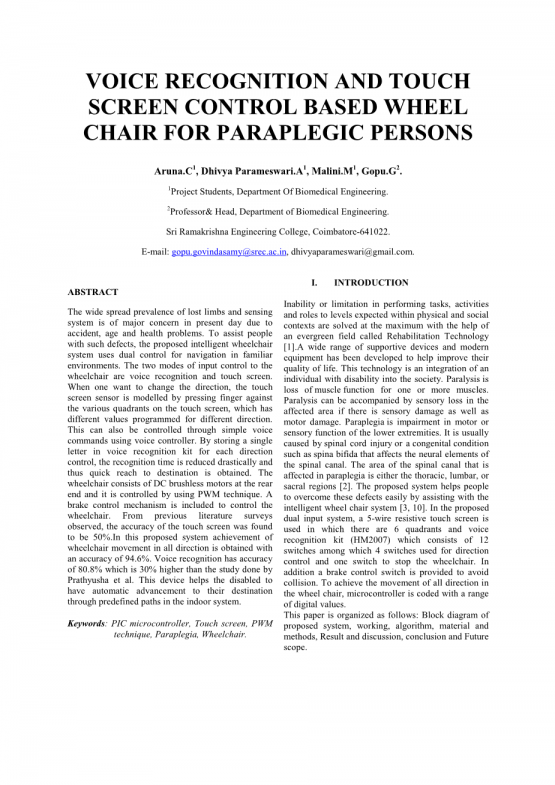
图1解释了所提出系统的框图。通过使用降压变压器将5v的电源提供给触摸屏,麦克风,语音识别芯片和驱动电路。开关用于选择控制模式(语音控制或触摸屏控制),然后将选择值提供给微控制器。当LCD显示已选择的值时,使用逻辑开关接通继电器电路,然后可以驱动安装在轮椅后端的直流无刷电机,轮椅的前轮能够旋转360°。为了避免碰撞,可以用相同的逻辑开关关闭提供给驱动电路的电源来停止轮椅。
图1 系统框图
a 语音识别芯片
语音识别芯片HM2007能够以脱离扬声器模式进行工作。最初,借助HM2007芯片模拟输入终端上直接连接的麦克风,将语音记录到连接在芯片的外部SRAM。一旦这些字母被存储在SRAM中,系统就被训练以保证编码到微处理器的每个方向的准确性。在训练之后,当主体通过麦克风拼出记录的字母时,将通过麦克风的字母与记录的字母进行比较,并以此为基础产生数字输出。然后将语音识别芯片的输出输入到PIC微控制器的数字输入端口。
b 触摸屏
本系统中使用的触摸屏是5线电阻型触摸屏,用5V电源为此触摸屏供电。该触摸屏分为6个象限。角落中的4个象限用于指定左,右,前和后的方向。中心的两个象限用于控制轮椅的速度。用于指定方向的四个象限被分配了一系列借助PIC微控制器编码的数字值。以下是为每个方向指定的范围:后-20到30;前-40到50;右-80到90;左-110至120。当用户将手指按压在触摸屏上特定象限时,在触摸屏上会感测到这些值。
c DC无刷电机
该系统包括了位于轮椅后端的2个直流无刷电机。[11]该电机使用脉冲宽度调制(PWM)技术[8,9]提供脉冲信号。设定RPM值为200,扭矩值为1Nm,以便为车轮提供旋转动力。因此,所提出的系统的轮椅可以承受高达2千克的负载。轮椅前端的两个轮子可以旋转360°。这有助于轮椅精确地转向所需的方向。
III 系统的工作方式
该系统由5线电阻式触摸屏和语音识别系统(HM2007)组成。语音控制IC由12个开关组成,其中4个开关用于方向控制,1个开关用于停止轮椅。以下是存储在HM2007工具包的缓冲器IC中的按键及其相关字母,用于轮椅沿指定方向移动,如表1所示。该系统的整体工作情况如图2所示。
表1:语音识别系统中的方向控制键及其相关字母
|
1 |
F |
前 |
|
2 |
L |
左 |
|
3 |
B |
后 |
|
4 |
R |
右 |
|
5 |
S |
停止 |
该系统采用5线电阻式触摸屏输入.它由6个象限组成。此外,刹车控制开关是用来停止轮椅时,使用这种模式。TH e以下是使用触摸屏控制移动轮椅的值[15],如表2所示。
该系统所使用的触摸屏输入方式为5线电阻式触摸屏输入。它由6个象限组成。此外,在使用这种模式时,还使用制动控制开关来停止轮椅。下表列出了使用触摸屏控制[15]移动轮椅的编码值。
表2:使用触摸屏的方向和速度控制
|
象限 |
方向 |
速度 |
|
1 |
前 |
- |
|
2 |
左 |
- |
|
3 |
后 |
- |
|
4 |
右 |
- |
|
5 |
- |
40% 占空比 |
|
6 |
- |
60% 占空比 |
图2 系统流程图
当电源打开时,主体通过使用输入选择开关选择输入模式的类型。当选择语音模式时,将关闭触摸屏的电源。受试者通过连接到工具包的麦克风拼出提前收录的字母。相应的键值显示在在附加到语音工具包的LED上。微控制器识别出这个字母时会触发轮椅的后端电机。因此轮椅在语音字母指示的方向上移动。当想要停下轮椅时,只需要拼出字母S。
当对象选择触摸屏作为输入模式时,关闭语音系统的电源并且打开触摸屏的电源。在触摸屏中,将手指按压在所需的象限上以便将轮椅移动到所需方向[12]。触摸屏中的每个象限对应在微控制器中编码的每个方向的范围值。当控制器识别出特定值时,显示在液晶显示屏(LCD)中,使用逻辑开关接通继电器电路。这样可以驱动安装在轮椅后端的直流无刷电机。轮椅前端的2个轮子可以旋转360°。轮椅可以在制动开关的帮助下停止,以避免碰撞。
IV 材料和准确率测试方案
该系统具有语音识别工具包,其中包括语音IC HM2007,3个缓冲芯片,静态RAM,LED显示器,麦克风,12个按键,其中10个键用于输入选择,一个键用于训练工具包和另一个键用于清除记忆。语音识别集成电路(Hm 2007)是一种具有片上模拟前端语音分析、识别过程和系统控制的单芯片电路。通过用于识别阶段的外部麦克风,可以将40个孤立字存储在64k外部静态RAM中。语音识别IC HM2007以与说话人相关的识别模式操作。在此模式下,设备仅响应当前用户。如果另一个人需要使用相同的系统,则必须进行新的录音。
触摸屏是一种2D传感装置,由用隔片稍微分开的2片材料构成。其结构是一片提供稳定的底层的玻璃和一片作为柔性顶层的聚乙烯(PET)[12]。 2片材料上涂有电阻物质,通常是称为氧化铟锡(ITO)的金属化合物。当压下PET膜时,两个电阻表面相遇。可以通过触摸屏控制器单元[13]读取相遇的位置。在该系统中,轮椅的实时移动方法如下:
对于单个用户,两种输入模式都采取了50次的跟踪。因为要求使用者选择输入的类型[13]。当选择语音模式时,用户通过连接到芯片上的麦克风拼出经过录音的字母。相应的键值显示在语音芯片上附带的LED上。微控制器识别出这个字母时会触发轮椅的后端的电机,使轮椅在字母所代表的方向上移动。当想要停下轮椅时,只需要拼出字母S即可。
选择触摸屏模式时,要求用户按压对应象限[12]来选择所需的方向。一旦在微控制器中识别出该象限值;将它显示在LCD上。当用户找到指定方向的正确设定值时手动打开制动开关然后打开驱动电路的电源,触发轮椅的后端的电机使轮椅移动。到达目的地时,用户手动关闭制动开关。
同样,对50名受试者进行了一些病例的追踪。从观察到的轮椅运动中,列出了语音输入模式和触摸屏模式的混淆矩阵[5,14]。经计算,语音识别控制和触摸屏控制的准确率分别为80.8%和94.6%,如表3和表4所示。
V 结果与讨论
从所提出的系统中可以看出,系统在触摸屏输入模式下的准确度高于语音输入模式下的准确度[15]。与M.Prathyusha等人(2013)[6,7]的研究相比,该系统的总体准确度也提高到了100%。各种试验的准确性的提高[14]见表3和表4。
|
方向 |
第一次 |
第二次 |
第三次 |
第四次 |
|
200次实验 |
300次实验 |
400次实验 |
500
英语原文共 5 页 |
您可能感兴趣的文章
- 拟人手臂的轨迹规划与轨迹跟踪控制外文翻译资料
- 新型磁性辅助内窥镜系统在上消化道检查中应用的可行性 和安全性外文翻译资料
- 基于FPGA可编程逻辑器件的复合视频图像处理外文翻译资料
- 从被测的高频域原始信号中提取巴克豪森噪声外文翻译资料
- 重型机床z轴热误差混合建模方法外文翻译资料
- 一个红外浊度传感器:设计与应用外文翻译资料
- 用于控制食物烹饪过程的电子系统.外文翻译资料
- 关于液体介质中电磁流量计的设计和理论上存在的问题。第二部分:关于带电粒子产生的 噪声理论外文翻译资料
- 基于LabVIEW和Matlab的小波变换对非平稳信号的分析仿真外文翻译资料
- 应用于腹腔镜手术的新型膜式加热加湿器 的开发外文翻译资料

