英语原文共 15 页,剩余内容已隐藏,支付完成后下载完整资料
电机-齿轮系统机电耦合效应的动态特性
Wenyu Baia, Datong Qina, Yawen Wangb, Teik C. Limb
a 机械传动国家重点实验室,重庆大学,重庆,400044,中国
b 德克萨斯大学阿灵顿分校,德克萨斯州阿灵顿,76019,美国
摘要: 分析了笼式异步电动机的非线性磁导网络模型(PNM)与行星齿轮转子系统的横向扭转耦合动力学模型相结合的机电模型的动态特性。仿真结果揭示了机床开槽、磁饱和、时变啮合刚度和轴系刚度等内部激励或参数对系统动力学的影响。将采用PNM电机模型的机电系统的响应与采用动态电机模型的机电系统的响应进行了比较。研究了电机与齿轮系统相互作用引起的机电耦合问题。此外,机电系统动态特性的频谱分析预示了检测不对称电压凹陷工况的有效途径。
关键词: 行星齿轮系统; 动态特性; 渗透网络模型; 感应电机; 不对称电压凹陷
1 引言
感应电机与行星齿轮组合的机电动力传动系统具有可靠性高、功率重量比高、成本低等诸多优点,被广泛应用于各种机械中,但机电系统经常会出现电气故障和机械故障。它在现代工业中的广泛应用使得对电机-齿轮系统进行机电动态分析,以提高其动态性能和系统可靠性变得至关重要。
目前这一领域的研究主要集中在电机电流特征分析或准确、高效的电力机建模上。电子动力机械建模最常用的方法是集中参数模型和有限元模型。然而,传统的集中参数模型不能考虑机器内部的空间和非线性效应,而有限元模型在考虑空间谐波和非线性效应时需要大量的计算时间,而且精度很高。本研究采用磁通网络模型(PNM)来模拟感应电机的动态运动。电机的永磁同步电机(PNM)是由E.R.Laithwaite于1967年正式引入的,V.Ostovic通过构建一系列复杂的感应电机和永磁同步电机的PNM而发展起来的。P·Sewell等人应用PNM方法,结合有限元方法得到的磁导值,对感应电机的动态性能进行了仿真。S.D.Sudhoff等人提出了一种基于PNM的感应电机状态变量模型,该模型直接根据几何数据计算磁导参数。X.han等人提出了一种计算电机径向和切向偏心力的耦合PNM电机模型,用于机械振动稳定性和非线性行为分析。PNM电机模型的优点是可以在精度和效率之间取得很好的平衡。它类似于有限元模型,它能够模拟机器中的物理场分布,但计算量要少得多。此外,它还可以在齿轮系统和电机的动力相互作用的进一步研究中实现。
针对不同的研究对象和目的,学者们提出了各种各样的动态齿轮系统模型。例如,J.Lin和R.G.Parker提出了行星齿轮固有频率和振型灵敏度分析的解析模型,该模型将载体角速度限制为恒定或平均值,而忽略载体加速度。Kahraman等人提出了以振动位移为变量的多啮合轮系振动模型,该模型不能通过转角变量直接与电机模型相联系。Ph.Velex等人。建立了在活塞式发动机燃烧和惯性影响下具有时变啮合刚度和非稳态输入转速的扭转齿轮模型。Khabou等人提出了机器启动过程、发动机非循环等瞬态工况下的八自由度齿轮动力学模型。这两个模型根据齿轮的转角或转速对啮合刚度进行了修正。然而,输入发动机转速是给定的或假定转矩与转速之间的简单关系函数,而不是使用复杂的电机模型。为了解决这个问题,G.Clerc等人。针对电机缺陷和齿轮故障分析,提出了一种PNM电机模型和直齿或斜齿轮动态模型相结合的模型。与文献[23]中的单级齿轮模型不同,本文在刘氏模型的基础上,建立了直齿行星轮组变速过程的弯扭动力学模型。该模型可与电机模型连接,进行机电动态分析。
电能质量对机电系统非常重要,因为如果电源发生故障,可能会出现严重的问题。感应电动机作为工业应用中最常见的电气设备之一,对电压不平衡非常敏感。J.Pedra等人发现不对称电压凹陷会引起转矩和电流峰值,并对三相笼式异步电动机的行为造成转速损失。A.S.NautiYal等人。提出了一种合理的方法来解释异步电动机在不同程度和不同电压不平衡条件下的转矩-转速、转矩-时间和转速-时间特性。L.Guasch等人分析了不对称电压凹陷的大小、持续时间、凹陷类型和初始点对感应电机行为的不同影响。此外,F.Babaa等人还对不对称电压凹陷对感应电动机的影响进行了实验研究。然而,针对非对称电压暂降下电机-齿轮机电系统动态特性分析的研究却很少。本研究的主要目的是进一步研究电机-齿轮机电系统的机电耦合效应,重点研究电机耦合的槽效应和饱和效应,以及时变刚度和不同轴刚度对机电系统动态特性的影响。同时,对系统在不对称电压凹陷和可变输入负荷下的运行状态监测进行了研究。与我们以往的研究不同,如文献[24]中机电系统的动态行为分析侧重于负载突变、三相电压暂态等不同外界条件的影响,或文献[31]来自感应电机的电磁刚度和阻尼对多级齿轮系统固有振动特性的影响。
本研究在前人研究的基础上,采用了机电系统的综合动力学模型。该模型包含具有弯扭动态行星齿轮系统的电机的非线性磁通网络模型。给出了机电系统动态特性的仿真实例。得到了环齿轮定、转子电流频谱、变转子转速、电磁力矩、动啮合力和加速度等动态特性。
本研究的其余部分结构如下:第二节介绍了PNM电机模型。第三节介绍了行星齿轮转子系统和感应电机的动力学模型。第四节分别对机电系统有无负载和不对称电压暂降的动态特性进行了仿真分析。最后,给出了几点结论。
2 渗透网络电机模型
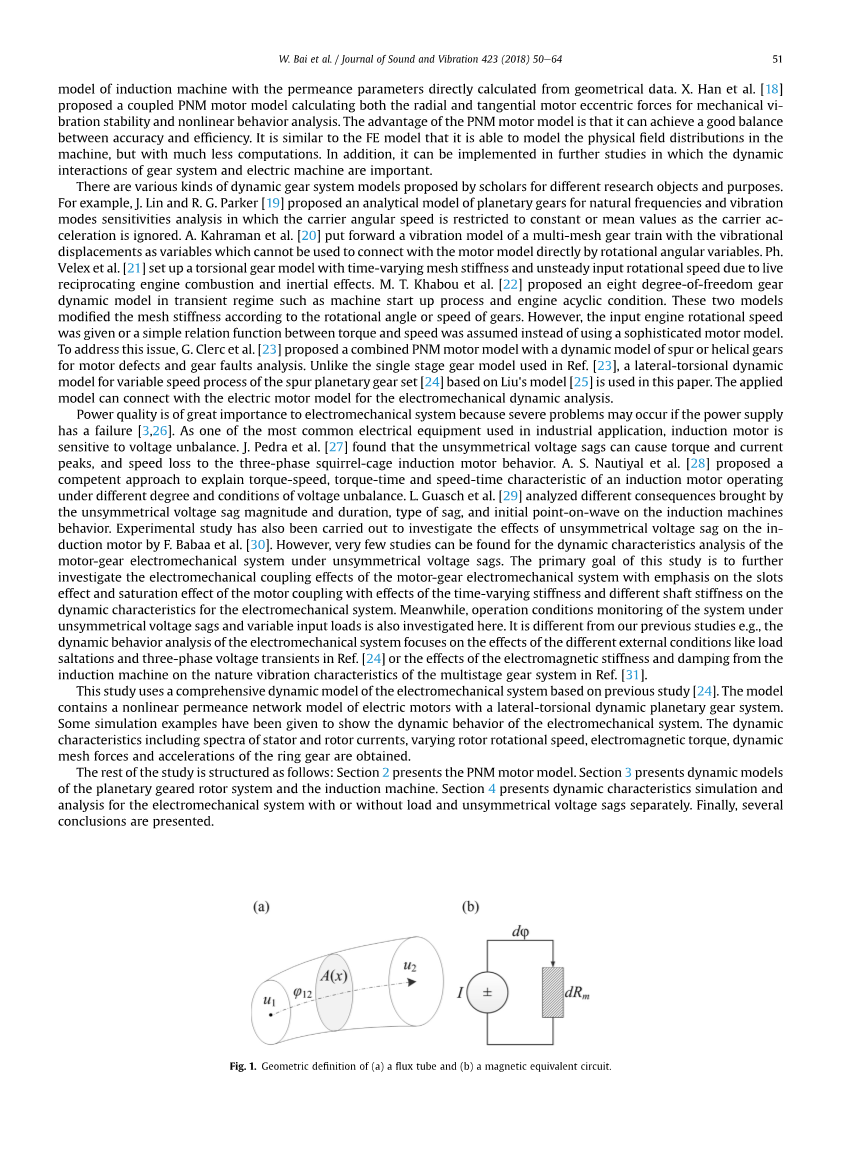
图表 1 (A)通量管和(B)磁等效电路的几何定义。
出现在磁等效电路中的元件可分为两组:有源(MMF)和无源(磁导率),如图1B所示。这里使用的是磁导,而不是磁阻RM的倒数,其定义如下:
式 1 其中P、m、A(X)和l分别是单元的渗透率、渗透率、横截面面积和长度。
MMF源可以通过将每相中的电流乘以定子的相应槽中的匝数或转子的转子回路电流来计算,所述转子回路电流可以表示为处于轭中或齿中。在计算了磁导率和MMF源之后,电机的PNM方程可以用磁标势u来表示。通量管两端的磁标量势u可以通过下列公式获得:
式 2 其中(U1-U2)是两个任意点1和2之间的磁标量电位差,Phi;12是从点1流向点2的磁通量,而P12是这两个点之间的磁导率。
图2描述了笼式异步电动机(SCIM)定子和转子中的主要磁导率以及所开发模型中使用的几何参数。定子内的主要磁通路径由定子线圈Psb、定子齿Pst和定子齿尖至齿尖Pstst磁通元件表示。定子磁轭和定子齿上的黑点分别代表定子磁轭Msb和定子齿Mst的节点电位。转子磁导和节点电势用类似的方式表示。
气隙磁导率是特定定子-转子之间的磁导率,它取决于齿与齿之间的重叠面积。具有Ns定子齿和Nr转子齿的电机系统气隙磁导率为Ns*Nr。图3显示了气隙磁导率与转子位置的关系。
在图2的PNM中考虑的这些定子、转子和气隙磁导率可以根据文献[12,17]中提出的方法进行计算。通过观察公式(2)中的磁导率网络和电网络之间的类比,可以建立起磁导率网络和电力网络之间的类比。标量势、磁通量和磁导率分别等同于电路的电压、电流和电导。定子节点方程可表示为[12,17]
图 2 定子和转子的磁导几何形状。
图 3 气隙磁导率与转子位置theta;的关系
转子节点方程与定子节点方程类似。描述磁链、电压、定子和转子回路电流之间关系的电气方程可以写成:
机电扭矩Te表示为:
式 1 其中P是机器中的极数。
式 5 其中Vqd0和R分别是qd0坐标系中的定子电压和定子和转子电阻矩阵。lambda;和I是定子和转子磁链和电流的矩阵。
饱和对感应电机非常重要,因为它会显著影响电机的暂态转矩、电流和稳定时间。根据下列公式,使用磁场强度H的函数来获得钢的非线性磁导率mu;fe。
式 2 H=△M/I,△M是铁段上的磁势,l是铁段的长度。
3 行星齿轮系统和感应电机模型
在这个电机-齿轮系统中,外加载荷作用在行星齿轮系统的载体上,动力通过轴从电机传递到行星齿轮系统的太阳轮,如图4所示。轴被视为无质量的质点,只考虑轴的扭转刚度。同时,本研究没有考虑轴或电机转子的轴承。所有齿轮均为无误差正齿轮,行星齿轮均匀分布在太阳轮周围,太阳齿轮或电机转子和轴之间没有轴错位。由于电机转速随整个系统的内部和外部激励而变化,因此在电机系统的机电动态仿真中必须考虑齿轮系统的瞬时转速。因此,在行星齿轮系统动力学模型中,选择每个齿轮和托架的转动位移和平移位移作为广义坐标。
在这一部分中,建立了变速加工的直齿行星齿轮系统的弯扭动力学模型。行星齿轮系统的结构如图5所示。太阳和环形齿轮的角位移theta;i(i=s,r)是在运动坐标系oixiyi中测量的相对值。坐标系oixiyi固定在载体上并与载体一起旋转。载体角位移Qc是在静态坐标系ocxcyc中测量的绝对值。行星齿轮角位移theta;pi(i=1,2,3)也是在运动坐标系中测得的相对值。坐标系onzeta;neta;n固定在载体上并随载体移动。因此,在这个动态行星齿轮模型中有三个坐标系。符号Ts和Tc分别表示作用在太阳和载体上的力矩。符号Tr表示由变速箱外壳提供的作用在环形齿轮上的扭矩。
图 4 机电系统结构图。
利用非惯性坐标系中的牛顿定律,得到行星齿轮系统的运动方程。作为例子,太阳位置在移动坐标系oixiyi中的绝对位置和加速度是,。在该模型中,由于载体的速度是一个变量,由载体的瞬时速度引起的加速度Ӫcxs、Ӫcys是不能忽略的。由于行星齿轮系统的转速不是很高,因此在本研究中忽略了科里奥利加速度、和向心加速度、,方程中保留了加速度。太阳轮位置的加速度是。太阳轮的运动方程如下:
式中(当),(当)。符号cj是齿轮、轴和轴承的阻尼,可以用公式计算。在这个方程式中,K是刚度,M是等效质量。本文中行星齿轮的其余运动方程也是类似地得到的。
啮合变形与坐标系无关,因此可以在运动坐标系系oixiyi或onzeta;neta;n中求得啮合齿轮副和轴承的变形和坐标关系。从图6可以得到包括齿轮和轴承变形在内的接触变形。符号表示第i个行星齿轮相对于太阳轮或环形齿轮的变形,以及第i个行星齿轮轴承相对于托架的径向或切向压缩变形。例如,太阳行星和环行星齿轮啮合变形方程如下。
图 5 直齿行星齿轮系统的弯扭动力学模型。
式中分别表示太阳、行星齿轮和环形齿轮的旋转位移、太阳轮或环形齿轮在x和y坐标上的位移以及第j个行星齿轮在zeta;和eta;坐标上的位移。其余部件的接触变形可以用类似的方法得到。
图 6 行星齿轮系统啮合变形的图解:(A)太阳-行星齿轮啮合变形(B)环-行星齿轮啮合变形。
在行星齿轮系统中,时变啮合刚度是最重要的激振源之一。求齿对啮合刚度最常用的方法是有限元法与解析法、解析有限元法与实验法等计算方法。与有限元相关的方法需要网格细化和大量的计算时间。因此,本文采用了基于势能原理的分析方法。啮合齿轮的总势能由赫兹能、弯曲能、剪切能和轴向压缩能组成。计算出的时变啮合刚度能反映齿轮几何的复杂性,并随轮齿接触位置的变化而变化。考虑了行星齿轮的啮合相位,计算出的太阳行星齿轮副的啮合刚度如图7所示。三条直线表示三个太阳行星齿轮副的啮合刚度。
四阶d-q模型因其简单、计算效率高等优点,是目前电机动态仿真中应用最广泛的电机模型。所有电气变量和参数都参考定子,由机器方程中的初始符号表示。所有定子和转子的数量都是在d-q坐标系中获得的,如图8所示,并且所有参数都是方程中的常数。方程式如下:
图 8 电机在d-q坐标系中的等效电路。
图 7 太阳-行星齿轮副的啮合刚度。
其中变量是d轴定子和转子电压,是q轴定子和转子电压,是转子机械角速度,是d轴定子和转子磁链,是q轴定子和转子磁链,是d轴定子和转子电流,是q轴定子和转子电流,这里P是机器极数。在图8中,Lm是磁化电感,是定子和转子的漏感,是定子和转子的电阻。
4.机电系统的动态特性
在机电系统的运行过程中,尽管各种内部激励会导致系统运行的复杂性,但外部环境也可能是不稳定的,如不对称电压骤降或外部负载变化等。在仿真中,机电系统空载启动,
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238435],资料为PDF文档或Word文档,PDF文档可免费转换为Word

