
英语原文共 8 页
电动助力转向系统的控制器设计
摘要
本文简要介绍了一种分析电动助力转向系统控制器稳定性和设计的新方法。设计转向系统时最重要的任务是确保驾驶员有良好的转向感。转向感的方式取决于辅助扭矩图。辅助扭矩图是检测到的转向盘扭矩和辅助电动机扭矩之间的一对一映射,其随着车辆速度而变化。然而,由于高水平的转向辅助增益和扭矩图的非线性,辅助扭矩图不能单独作为EPS控制器应用。扭矩图的两个元素都可能导致不稳定性,这会导致转向系统的振动或发散。因此,EPS系统总是需要设计有稳定补偿器和辅助扭矩图。设计补偿器的目的是使系统稳定并稳定并减弱任何不愉快的振动。本文介绍了EPS系统的机械模型,并演示了识别模型参数的方法。基于EPS模型,分析了具有近似线性扭矩图和非线性扭矩图的系统的稳定性。此外,提出设计稳定补偿器标准的建议。在模拟中应用具有不同参数的Leadlag补偿器和扭矩图,并且执行车辆实验以验证理论分析。
关键词:控制器设计;电动助力转向(EPS);稳定性分析;系统非线性
- 介绍
电动助力转向系统(EPS)是一种电机驱动的动力转向系统,可为驾驶员提供轻巧方便的转向感。今天,大多数乘用车都配备了EPS系统,以支持驾驶员而不是液压动力转向系统,因为它具有许多优点[1]。这些优点包括高燃料效率,紧凑的体积,易于调节的转向感,以及将系统与车辆中的其他电控系统(例如电稳定性控制)组合的能力。
扭矩图是EPS控制器的主要元素;它决定了电机有多大的转向扭矩。扭矩图在测量的驱动扭矩和来自马达的辅助扭矩之间提供非线性增加函数。扭矩图的形状决定了驾驶员的转向感觉[2]。通常,当速度为零时扭矩图的斜率是最陡的,然后随着速度的增加而减小,因为当车辆停放时转向所需的扭矩是最大的,并且转向需要感觉更重当车辆快速行驶以达到稳定时,为驾驶员。低速下的高水平控制器增益和扭矩图的非线性可能是系统中不稳定和振动的根源[3], [8];因此,除了扭矩图之外,还需要稳定补偿器来完成EPS控制器。然而,由于多种原因,为EPS设计合适的控制器已成为一个具有挑战性的问题[4]。在存在任何未建模的动态和参数不确定性的情况下,控制器需要是鲁棒的。参数调整可能具有挑战性,因为即使对于相同类型的车辆,每辆车的系统参数也可能有一些变化。此外,由于转向系统与可能敏感的人手相互作用,良好的控制器设计应该消除不希望的振动。已有许多研究表明各种形式的EPS控制器使系统稳定。参考文献[5]提出了基于EPS模型的稳定条件,并利用固定结构补偿器来稳定系统并使扭矩振动最小化。参考文献[6]使用频率加权阻尼补偿器来增加系统的相位裕度,但相位裕度的增加范围受到限制。 参考文献[7]采用H-infinity控制来辅助扭矩,改善转向感,并增强闭环鲁棒性。 限制是所提出的H-infinity控制具有非常高的阶数并且不能消除振动。 参考文献[8]提出了一种强大的整体滑模控制器,用于产生辅助扭矩,稳定系统并改善EPS阻尼特性。 参考文献[9]提出了一种用于双小齿轮EPS的最佳线性二次调节器控制器。
以前关于EPS控制器设计的研究有一些局限性。首先,大多数研究将非线性扭矩图近似为简单的线性增益,而不分析非线性对系统稳定性的影响。线性化系统仅表示工作点附近的动态特性,系统的非线性元件经常引起独特的现象,这在线性系统中是不可能发生的。即使线性化系统稳定,扭矩图等非线性元件也会导致不稳定,这与系统的发散或剧烈振动直接相关。其次,所提出的控制器仅通过模拟或台架测试进行验证。模拟和台架测试是非常有限的环境,并不反映实际车辆的所有特征。计算机模拟不表示系统的未建模动态。此外,在模拟和台架测试环境中,很难重现从道路穿过的反作用力轮胎。由于轮胎具有显着的非线性特性,轮胎反作用力很难建模[10]。当车辆处于停车状态时尤其明显,由于辅助增益较大,这是系统稳定性的最坏情况。最后,许多研究人员建议在实际使用中实施太复杂的控制器。在商用车辆的开发中强烈避免了大的计算量。
本文介绍了一种利用非线性扭矩图分析EPS系统稳定性的新方法,并建议为给定扭矩图设计稳定补偿器的整个过程。EPS系统被建模为与扭转弹簧连接的两个集总质量,并且还建议了模型参数识别方法。分别在拉普拉斯域分析了两个潜在不稳定源,大增益和扭矩图非线性的影响,并给出了设计稳定补偿器的标准。采用前置补偿器作为频域环路整形的稳定补偿器,并提出了选择补偿器参数的设计方法。最后,检验模拟和车辆实验结果以验证理论分析。
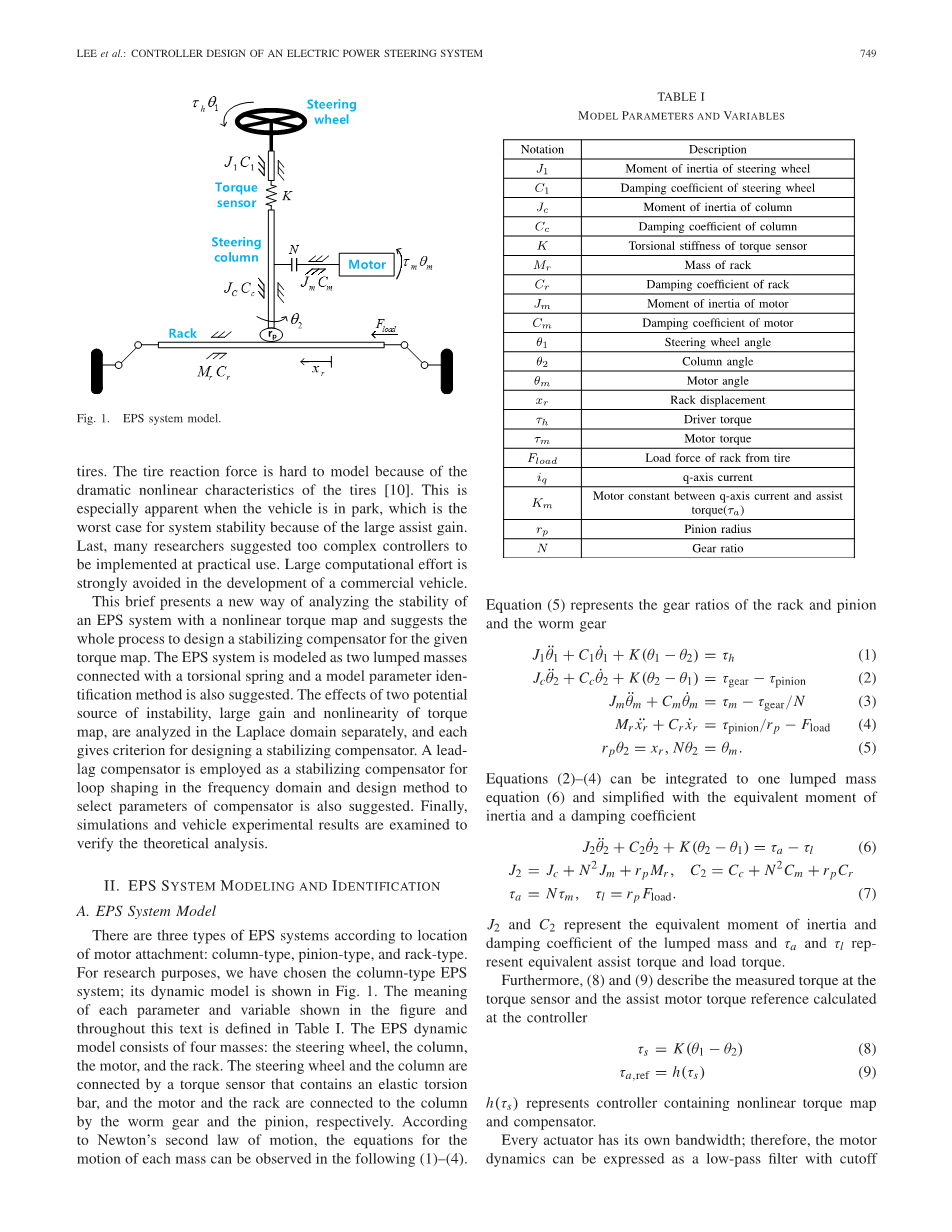
图1 EPS系统模型
- EPS系统建模与识别
- EPS系统模型
根据电机附件的位置有三种类型的EPS系统:柱式,小齿轮型和齿条型。 出于研究目的,我们选择了柱式EPS系统; 其动态模型如图1所示。图中所示的每个参数和变量的含义见表I。EPS动态模型由四个质量组成:方向盘,柱,电机, 和机架。 方向盘和立柱通过包含弹性扭杆的扭矩传感器连接,并且马达和齿条分别通过蜗轮和小齿轮连接到立柱。根据牛顿第二运动定律,可以在下面的(1)-(4)中观察每个质量运动的方程。
表I 模型参数和变量
|
符号 |
描述 |
|
方向盘的转动惯量 |
|
|
方向盘阻尼系数 |
|
|
圆柱的惯性矩 |
|
|
圆柱阻尼系数 |
|
|
扭矩传感器的扭转刚度 |
|
|
支架质量 |
|
|
支架阻尼系数 |
|
|
电机转动惯量 |
|
|
电机阻尼系数 |
|
|
方向盘角度 |
|
|
柱角 |
|
|
电机角度 |
|
|
机架位移 |
|
|
驱动扭矩 |
|
|
电机扭矩 |
|
|
轮胎的齿条承载力 |
|
|
q轴电流 |
|
|
电机在q轴电流和辅助扭矩之间的常量 |
|
|
小齿轮半径 |
|
|
传动比 |
等式(5)表示齿条和小齿轮与蜗轮的传动比
(1)
(2)
(3)
(4)
(5)
等式(2) - (4)可以集成到一个集总质量方程(6)中,并用等效转动惯量和阻尼系数进行简化
(6)
(7)
和表示集中质量的等效惯性矩和阻尼系数,和表示等效辅助扭矩和负载扭矩。
此外,(8)和(9)描述了在扭矩传感器处测量的扭矩和在控制器处计算的辅助马达扭矩参考
(8) (9)
表示包含非线性扭矩图和补偿器的控制器。
图2 EPS系统的框图
表II系统识别实验条件
|
单一类型 |
|
|
振幅 |
|
|
频率 |
|
每个执行器都有自己的带宽; 因此,电动机动态可以表示为具有截止的低通滤波器频率omega;m
(10)
图2示出了整个EPS系统的框图,其描述了系统从外部输入(转向盘扭矩和道路干扰)到系统状态(手柄和柱角)的流动。
- 模型参数识别
基于模型的控制器始终需要系统标识来确定模型参数的值。用于精确系统识别的方法与开发良好系统模型一样重要。这是因为没有建模参数值,控制器设计的模型再好也是没用的。
为了识别参数值,我们将各种频率的电机励磁的系统响应与模型的系统传递函数进行比较。 车辆具有提升和自由操作条件,以确保除了电机扭矩(和)之外没有外部扭矩。 在这些条件下,电机以不同频率的正弦输入激励系统,柱角,电机电流和转矩传感器值都作为系统输出变量测量。 实验条件列于表II中。 通过提升()和自由操作条件()修改(1)和(6),我们可以获得从辅助扭矩到柱角和扭矩传感器以及扭矩的传递函数传感器到柱角,如(11)-(13)所示
(11)
(12)
(13)
图3 来自实验结果和传递函数的幅度的波特图
图4 来自实验结果和传递函数的大小的波特图
等式(13)仅包含参数J1,C1和K; 因此,如果我们从传感器规范中知道K,我们可以得到J1和C1的值,这将最小化传递函数(11)和每个频率的实验结果之间的平方误差之和发现J1,C1 s.t. min
然后,基于J1,C1和K的值,我们可以使用(11)以相同的方式找到J2和C2的值。在本次实验中,我们使用了现代汽车的i30。等式(14)是拟合每个参数的结果,并且图3和4示出了通过使用波特图中的拟合值在实验结果和传递函数之间的比较
K = 143.24 Nm/rad
J1 = 0.044 kg · m2, C1 = 0.25 Nm · s/rad
J2 = 0.11 kg · m2, C2 = 1.35 Nm · s/rad. (14)
图5. EPS的扭矩图
图6. EPS的控制器结构
- 稳定性分析与控制器设计
- 控制器结构
当驾驶员向方向盘施加转向扭矩时,扭矩传感器用(8)测量扭矩并将其输出到EPS系统的控制器。在测量的扭矩通过扭矩图和补偿器之后,EPS控制器确定电动机的辅助扭矩。我们使用(15)设计了类似于图5的典型转向特性图。是在通过稳定补偿器之前的辅助扭矩值
(15)
扭矩图在下具有死区,以防止系统对驾驶员扭矩过于敏感地反应,尤其是在高速行驶时。该死区是控制器的非线性源。随着车速的增加而减小,因为在停车状态下,驾驶员需要大的辅助扭矩,而在高速行驶时需要较小的辅助扭矩。 应用在传统车辆上的扭矩图具有比图5更平滑的曲线形状,但是为了简化分析,我们利用具有死区的比例函数。
控制器还需要某种类型的稳定补偿器,因为扭矩映射的高辅助增益和非线性使系统不稳定。在本文中,我们使用超前滞后补偿器作为稳定滤波器,使EPS控制器的结构类似于图6超前滞后补偿器位于扭矩映射之后,为控制器提供动态特性,同时确保稳定性和抑制整个EPS系统的振动。超前滞后补偿器的传递函数是
(16)
表达式的下标中的i表示控制器使用了几个超前滞后补偿器。随着环路整形的需要,超前滞后补偿器的数量可以增加。如果gt;,那么是一个主要的补偿器,如果lt;,那
资料编号:[5647]

