英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
四轮独立驱动电动汽车转矩矢量控制
摘要:
近年来,人们对电动汽车的兴趣逐渐增加。 不同的电力传动系统布局中,四轮毂电机似乎是最有吸引力的一种布置方式。事实上,此种布置方式允许重新设计车辆内部的空间,并可以嵌入式功能实现独立分配制动和驱动的控制,控制车轮上的扭矩以便产生偏航力矩,从而改善车辆操纵性(扭矩矢量化)。 此论文提出并比较了两种不同的转矩矢量四轮电动汽车的电机控制策略。控制策略的效果,即其对于改善操纵性和经济性由开环和闭环数值模拟的手段仿真评价。
引言:
在过去的几年中,由于环境保护运动的兴起的以及持续上涨的油价,人们对混合动力和电动汽车的兴趣一直在不断增长。如今,越来越多的汽车制造商开始销售起了混合动力汽车,同时全电动汽车在市场上也逐渐兴起。在这些新一代的乘用车中,一种有趣的车辆布局方式即是四轮毂电机(IWM,[1-2])独立驱动方式。
具有轮毂电机的混合动力或电动汽车实际上具有如下几个优点:可以增加内部空间,从而扩大设计自由度,并为电池等组件增加空间;由于电动机直接位于车轮内部,因此不需要动力总成,从而消除了驱动轴,变速箱和差速器等元件。 IWM的缺点在于簧下质量增加,这被会降低整车的乘坐舒适性和抓地力。然而,最近的研究表明,由簧下质量增加引起的性能下降可以通过对悬架顶部安装柔顺衬套,并对被动弹簧和减震器的力学特性等进行专门设计而在很大程度上得到弥补[3],[11]。
除了布局方面的优势外,IWM的布置方式还为主动控制系统的设计提供了机会,特别是在涉及横向动态控制方面。由于拥有四个独立的电动机,因此整车ECU可以独立控制每个车轮上的驱动和制动扭矩。也就是说,驱动扭矩和制动扭矩可以轻松地分配到四个车轮上,从而避免了目前汽车通常配备的系统的复杂性和弊端,即利用限滑差速器和半主动差速器来分配驱动器上的驱动扭矩来产生及控制横摆力矩。然而额在这些传统系统中,扭矩只能从转速最快的车轮传递到最慢的车轮。虽然配备主动差速器的动力总成可以克服这一局限性,并且可以控制扭矩传递的量及其方向[4]。但这些设计的实现很难与空间的占用以及成本增加相协调。而基于制动的系统(例如ESP)只能通过大幅降低速度来稳定车辆,因为横摆力矩是通过对四个车轮施加差速制动产生的[5-7]。制动扭矩矢量控制(BTV)等系统为了获得所需的偏航力矩则需要在车辆的一侧产生牵引力(增加发动机扭矩),另一侧产生制动力。这样才可以在不降低车速的情况下控制车辆的横摆转矩。 [8-9]中描述的BTV系统实际上是作为主动差速器使用的,但是它还不能够产生完美的的驱动和制动扭矩,同时制动器的功耗可能成为一个问题。
事实上,目前转矩矢量化方案可能是产生偏航力矩最有效的方法,特别是混合动力和电动汽车设计中,基于四轮毂电机的布局似乎具有特别的应用前景。
本文介绍了基于四轮毂电机独立驱动电动汽车的两种转矩矢量控制策略的数值分析。主动控制的目的是增强车辆偏航侧滑的操纵性,尤其是其瞬态响应,以提高汽车安全性。第一种控制策略基于最佳控制理论(LQR),而第二种策略则依赖于一个指标(以下称为偏航指标),该指标与车辆的过度转向/转向不足行为直接相关。
乘用车的14自由度(dofs)模型用于开发和测试控制策略;该模型能够再现电动机和制动系统的响应。 同时本文还包括一个驱动程序模型,以便可以执行闭环操纵。本文会在接下来的一系列操作中比较两种控制策略的性能。
参数命名:
|
|
侧滑角 |
[deg] |
|
|
转向角 |
[deg] |
|
|
偏航角 |
[deg/s] |
|
V |
车速 |
[km/h] |
|
ay |
侧向加速度 |
[m/s2] |
|
Fx,f |
右前轮纵向力 |
[N] |
|
Fx,r |
右后轮纵向力 |
[N] |
|
Fz,i |
轮胎负荷 |
[N] |
|
Mz,f |
前轴横摆力矩 |
[Nm] |
|
Mz,r |
后轴横摆力矩 |
[Nm] |
|
a |
前轴至质心距离 |
[m] |
|
b |
后轴至质心距离 |
[m] |
|
cf/r |
车辆前/后轮距 |
[m] |
|
m |
车重 |
[kg] |
|
Jz |
车辆的横摆惯性矩 |
[kgm2] |
|
x |
状态向量 |
[kg] |
|
u |
控制力矢量 |
[kg] |
|
Y |
测量向量 |
[kg] |
|
[A] |
状态矩阵 |
[kg] |
|
[B] |
输入矩阵 |
[kg] |
|
[K] |
控制器增益矩阵 |
[kg] |
|
Kf/r |
前后轴的转向刚度 |
[N/rad] |
汽车建模:
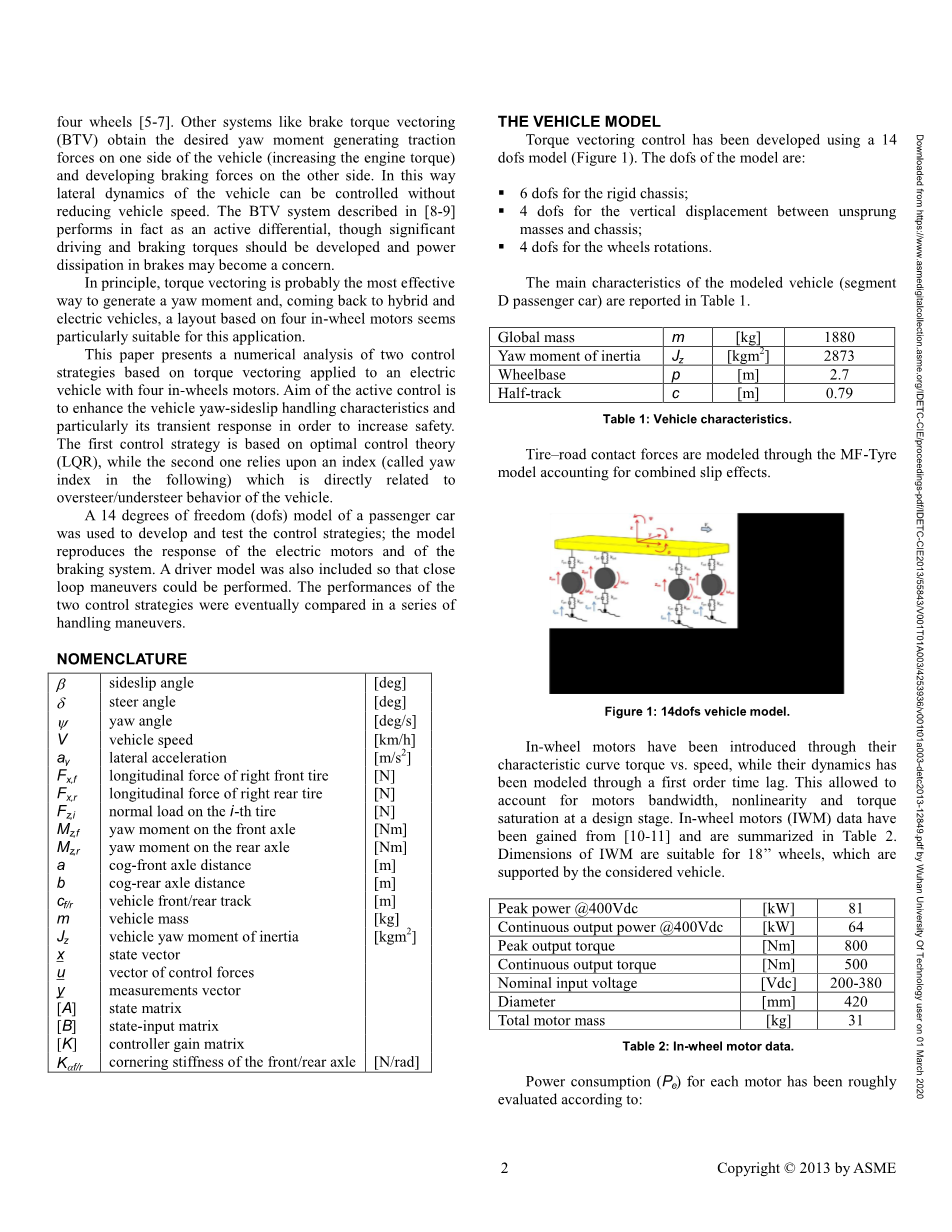
使用14自由度模型开发了转矩矢量控制(图1)。 模型的自由度是:
1、刚性底盘的6个自由度。
2、用于悬挂弹簧质量和底盘之间的垂直位移的4个自由度。
3、车轮旋转的4个自由度。
表1列出了建模车辆(D型乘用车)的主要特性。
|
总重 |
m |
[kg] |
1880 |
|
横摆惯性矩 |
Jz |
[kgm2] |
2873 |
|
轮距 |
p |
[m] |
2.7 |
|
半轴距 |
c |
[m] |
0.79 |
表一 车辆参数
通过MF-Tyre模型对轮胎-道路接触力进行建模,以解决组合滑移效应。
图一 14自由度车辆模型
轮毂电机的建模需要引入其转矩与转速特性曲线,而其动力学特性则需要通过一阶时间滞后进行建模。这允许在设计阶段考虑电机带宽,非线性和转矩饱和。 轮毂电机(IWM)的数据是从[10-11]中获得的,并在表2中进行了汇总。IWM的尺寸适用于18英寸的车轮,由所选车型提供数据支持。
|
最大功率 |
[kW] |
81 |
|
额定功率 |
[kW] |
64 |
|
最大转矩 |
[Nm] |
800 |
|
额定转矩 |
[Nm] |
500 |
|
额定输入电压 |
[Vdc] |
200-380 |
|
直径 |
[mm] |
420 |
|
质量 |
[kg] |
31 |
表二 电机参数
每个电动机的功耗(Pe)已根据以下条件进行了粗略计算:
其中Tm和omega;m是电动机的转矩和角速度,而 km是一个常数,与电子设备(逆变器)和电动机的铜损有关[12-13]。当需要驱动扭矩时,损耗会增加功率消耗,同时也会降低再生制动期间的能量回收效率。
根据文献[11]的数据,最大制动扭矩被限制为650Nm(相当于车辆减速度约3m / s2),以避免在再生制动期间轮毂电机过热。因此,在制动操作期间需要摩擦制动器来辅助轮毂电机。因此还将通过二阶动力学和时滞常数项将摩擦制动系统动力学引入模型。
转向角,油门和制动踏板位置被视为代表特定操作的强制输入,它们可以在预处理阶段由用户输入(开环操作),也可以在仿真过程中由驾驶员模型经过计算后反馈输入(闭环操作)。
驾驶员模型:
为了进行闭环操纵,还需要将车辆模型与巡线驾驶员模型耦合。再根据两个误差函数(e1和e2,[14])来确定遵循给定轨迹的允许转向角:
其中K1和K2是驱动器模型增益,而误差函数定义为:
图二 驾驶员模型
误差函数e1表示切线到所需路径的角度(ref)与车辆偏航角之间的差(即车辆方向的误差),而e2是实际质心位置与理想质心之间的误差。应当指出的是,虽然在计算车辆方向误差函数时用到了车辆的理想质心位置,但是在车辆(e2)位置上的误差函数则使用了车辆的实际质心位置。因此,可以将车辆方向相关的误差函数的视为前馈,而车辆位置相关的误差函数的可以归类为反馈贡献。
转矩矢量控制:
本文设计了两种通过独立控制IWM驱动力和四个车轮上的摩擦制动器的控制策略来控制车辆的横向动力。两种策略都以通过在轮胎上产生纵向力来产生横摆力矩以改善车辆的操纵性能。特别是,相同轴的轮胎会产生具有相同模数和相反符号的力。因此,在前轴和后轴上产生的偏航力矩(Mz,f 和 Mz,r)由下式给出(图3):
图三 内/外扭矩分配和参考系统
在(4)中,Fx,f和Fx,r 分别是在右前轮胎和右后轮胎上产生的纵向力,而cf 和cr 代表相应的轨迹。对于像ESP这样的系统,本工作中开发的控制逻辑具有以下优点:
1、仅使用作用于制动器的系统所需的纵向力的一半即可产生相同的横摆力矩;
2、减少了功率消耗,因为在同一个轴的另一个车轮进行电能再生制动时,可以部分回收在一个车轮上产生驱动扭矩所需的能量;
3、由于施加了相同大小的驱动力和制动力,因此可以保持
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[236852],资料为PDF文档或Word文档,PDF文档可免费转换为Word

