英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
基于DSP的并联式混合动力汽车整车控制器设计
摘要:这篇文章主要是针对并联式混合动力汽车所设计的基于DSP的整车控制器。数字信号处理器(DSP)在电动车的控制系统中扮演一个关键的角色。它为运行复杂的能量管理控制算法提供了一个有效的计算平台。首先详细介绍了VCU的硬件设计,然后讨论了软件设计中使用MATLAB的RTW工具箱进行自动代码生成C语言的程序。这样便将一个灵活的、可配置的Simulink模型移植到了VCU上。实验结果展现了可靠的硬件设计和针对控制算法灵活的软件设计。
关键字:混合动力汽车;DSP;TMS320F2812;自动代码生成
简介
近年来,混合动力汽车被广泛研究,因为它在不牺牲动力的同时大大提高了燃油经济性,以及降低了污染物的排放。它车载了一个发动机和电动机及电池组。发动机和电动机都可以独立驱动汽车,同时也可以将两者的动力结合在一起。通过收集制动能量使混合动力汽车在一定程度上提高了燃油经济性[1]-[2]。
图1所示的就是典型的混合动力汽车结构,其动力集成单元包括一个发动机、一个电动机、Ni-Hi电池、一个自动的离合器以及变速器。电动机直接连接在离合器和变速器之间。这种结构在制动时可以通过发电回收制动能量。[3]
图1 并联混合动力汽车动力系统结构图
混合动力汽车由几个子系统构成,例如整车控制器(VCU)、发动机、变速器、电动机/发动机和Ni-Hi电池组。VCU采集每个子系统下的传感器的信号。根据能量管理策略,VCU控制其子系统进行实现目标性能,例如最大燃油经济性和最小排放。因此VCU是电动混合动力汽车的控制核心。它直接影响了电动混合动力汽车的性能。
这篇论文的重点主要是介绍并联混合动力汽车的VCU设计。论文分为以几大部分:第二节是基于TMS320F2812这款DSP芯片的VCU的硬件电路设计。第三节主要介绍软件部分,使用MATLAB下的RTW工具箱的自动代码生成功能直接由模型生成C程序。最后在第四节做了总结。
基于DSP的硬件电路设计
2.1 VCU的简介
主要运算的芯片要满足可以运行复杂的算法。在我们设计控制策略中最核心的能量管理策略时,使用了MABLAB/Simulink的图形化设计环境,因为它可以便捷地调节参数和改写控制算法。模型可以直接通过RTW模块自动生成C代码,下载到VCU地Flash存储器中。快捷地模型设计以及自动代码生成技术不仅大大减少了开发时间,而且提高了代码地质量和可靠性。
我们选择了TI公司的一款DSP TMS320F2812作为VCU的核心运算芯片。下面是它的一些特点:
-150MHz,150MIPS,32位定点数字信号处理器,提供了充足的计算能力
-片载16K的RAM,128K的Flash.内存充足不需要外扩储存器。
-16路12位的告诉ADC,16路PWM输出,56路的数字I/O口和三路32位CPU定时器,看门钩和JTAG接口。这些集成功能模块使他特别适合于电动机控制和其他工业控制场合。
-eCAN模块,两个SCI模块,标准UART,这些都使控制器之间能够快捷的通讯。还有,TMS320F2812支持C/C 编译器,这使得开发者可以使用高级编程语言编写程序,而且可以使用C/C 编写复杂的数学算法。图2就是VCU的信号流图。
图2 VCU的控制信号流图
2.2 I/O和轮速测量信号调制电路
控制器需要测量知道所测量信号的类型,例如数字信号、模拟信号或方波信号。在汽车上,一些开关信号需要12V的电压驱动,但是电池电压往往不是很稳定。例如,电池电压可能高达14-16V,但是一旦启动汽车电压又会降低很多。这直接影响了信号的采集。在这些信号传输到TMS320F2812时,应该先经过调制和滤波。
测量轮速采用的是霍尔传感器,它由电池提供12V的电压。它的输出信号是标准的方波。可以直接通过CAP1读入TMS320F2812中,通过计算可以直接得到轮速。因为信号电压在不同时刻有正有负,但是TMS3202812的输入电压范围是0-3.3V,因此轮速信号在输入到TMS3202812的CAPI输入管脚之前必须经过调制。在经过调制之后,信号的电压变化范围变为0-5V,然后我们可以使用一个5V-3.3V的降压电路,将它转化到0-3.3V.
图3 轮速信号的调制电路
2.3 数字输入和继电器控制
在VCU中我们需要输出一些数字信号去控制一些外围器件,例如发动机的熄火、空调扽起停、DC/DC控制等等。BTS724是一个4通道电桥驱动器,它主要用于汽车上恶劣环境中的电磁阀控制,但是同时它也适用于其他环境。例如,该芯片也被用于控制各种类型的电阻、电感和电容性负载,特别是一些大电流负载。它可以代替电磁继电器以及可以分离电路。
BTS724可以提供多方面的保护,例如短路保护、过载保护、限制电流、过热保护、过压保护、电池反接保护。另外,它也有一定的诊断功能,为VCU提供了一部分诊断信息。使用集成了很多模块的芯片不仅简化了VCU的设计,同时也大大提高了VCU硬件的可靠性。图4所展示的就是继电器控制的硬件电路原理图。
图4 BTS724的驱动电路原理图
2.4 CAN总线的硬件电路接口
CAN(controller area network)总线采用串行多主机通信协议,能有效地支持分布式实时控制和速度高达1 Mbps的数据通讯,同时还能保证数据的完整性。CAN总线适用于干扰很大以及工作环境恶劣的场景,例如在汽车上和其他要求高稳定性的工业场景中使用。混合动力汽车中的ECU也是通过CAN总线与其他器件连接。
TMS320F2812上集成了eCAN(enhanced Controller Area Network)模块可以支持标准的CAN2.0B协议。因为有32个可配置的邮箱和时间戳特点,Ecan提供了一个灵活和强大的串行通信接口。
TMS320F2812控制器需要一个收发器与CAN总线相连。在我们的设计中,们使用SN65HVD230作为收发器。为了提高抗干扰的能力,往往在电路中增加一个高速光耦6N137用来隔离VCU与外部电路。
图5 CAN接口驱动电路原理图
软件设计和自动代码生成
图6展示了主要的控制程序流程图。
3.1 能量管理策略
能量管理策略是软件设计中的核心。通常混合动力汽车的运行模式分为不同的状态。表1列举了混合动力汽车所有可能的工作状态。由于混合动力汽车有多个工作模式和复杂的状态转换,因此可以使用有限状态机模型来描述了混合动力汽车的工作状态转换。
MTLAB/Simulink/Stateflow 工具箱是一个可以图形化设计驱动系统模型以及仿真驱动系统模型的平台。特别是,Stateflow与Simulink提供了模型的仿真验证这一强大的功能,如灵活的调试器和支持将模型的状态转换动画显示。因此,这便使我们很容易考虑到模型运行和迭代的各种情况,一直到状态流图和仿真结果成为期望的样子。图7显示了不同运行模式的相互切换过程。
表1 混合动力汽车电动机与发动机工作状态
VCU的软件部分主要分为两个部分:一是信号的采集,CAN网络的通讯和中断服务子程序,另一个是能量管理系统控制策略,也就是HEV的核心控制任务。
图6 VCU主程序流程图
图7 基于Matlab/Stateflow的HEV运行模式切换图
3.2 从流程图直接自动生成C代码
与传统的开发过程相比,基于Simulink的开发过程中通过模拟执行,避免了很多潜在的错误,使得在开发早期就可以对控制策略得执行进行检查。第二个主要目标不仅是可以模拟系统,同时也可以为VCU直接生成C代码,不需要进行手工编写。这就是所谓的自动代码生成,现已被广泛的测试和应用,特别是在汽车应用领域。MATLAB环境下提供的自动代码生成Simulink/Stateflow模型支持TI公司的一系列芯片,以及摩托罗拉公司和Xilinx公司的设备。由Simulink模型直接自动生成代码是基于Real-Time Workshop(RTW)。Real-Time Workshop是一个功能强大的实用工具,可以从Simulink模型[ 6 ]自动生成代码。生成的代码进行了优化,其代码质量与手写的代码相当。C代码自动生成的过程如图8所示。
图8 基于Matlab/RTW的自动代码生成和DSP TMS320F281
总结
本文对基于TI公司的DSP TMS320F2812实现了并联式混合动力汽车VCU的设计。给出了硬件设计和软件流程图。基于有限状态机和Matlab的Stateflow工具箱设计了能量管理策略,同时介绍了C代码自动生成技术。以上提供了一个完整的整车控制器的设计过程。模型的建立和实验结果证明了该VCU的优良性能。
致谢
作者要感谢上海交通大学自动化学院、香港大学的MAE的帮助和鼓励。
参考文献
[1] Anthony M. Phillips, Miroslava Jankovic, and Kathleen E. Bailey , ”Vehicle System Controller Design for a Hybrid Electric Vehicle”, Proceedings of the 2000 IEEE International Conference on Control
Applications Anchorage, Alaska, USA September 25-27, 2000
[2] Gregory A. Hubbard, Kamal Youcef Toumi, ”System Level Control, of a Hybrid-Electric Vehicle Drivetrain”, Proceedings of the American, Control Conference Albuquerque, New Mexico June 1997
[3] Chan-Chiao Lin, Huei Peng and Jessy W. Grizzle, ”Control System Development, for an Advanced-Technology Medium-Duty Hybrid Electric, Truck”, International Truck Bus Meeting Exhibition, Fort Worth, TX, November 2003.
[4] Weimin Li, Guoqing Xu, Zhangcheng Wang, Yangsheng Xu,”A Hybrid, Controller Design For Parallel Hybrid Electric Vehicle”, IClT 2006, ShenZhen, China.
[5] AndreM Wagener, Peter Seger, Christian Koerner, Herbert Kabza,”Simulation-Based Automatic Code Generation for ECUs in Distributed, Control Systems, Applied in a Testbed for a Hybrid Vehicle, Drivetrain”, ISIErsquo;2000, Cholula, Puebla, Mexico.
[6] Darko Hercog, Milan Curkovic, Gregor Edelbaher, Evgen Urlep, ”Programming of the DSP2 board with the Matlab/Simulink”, IClT, 2003, Maribor. Slovenia.
四轮微型电动车控制系统设计
摘要:本篇论文中设计了一辆四驱微型电动汽车的控制系统,包括整车控制器(VCU),轮毂电机控制单元(MCU)、电池管理系统(BMS)和时间触发的CAN(TTCAN)通信网络。整车控制器(VCU)作为一个整个系统的关键组成部分,它基于驾驶员的操作、通过TTCAN输入的其他模块的数据以及其他传感器采集的信息,给其他模块发送命令。电池管理系统(BMS)负责电池维修和状态估计。轮毂电机控制单元(MCU)根据来自VCU的命令来控制电机转动。TTCAN网络是基于传统CAN网络通过软件实现的。
关键词:微型电动车;控制系统设计;无刷直流电机;电机;电池管理系统;TTCAN
介绍
1970年代以来,由于能源危机和环境污染,电动汽车(EV)备受关注。考虑中国国民的购买力,城市交通结构,微型电动车在未来的市场前景广阔。
微型电动汽车控制系统与内燃机车控制系统有很大的不同。必须重视电机控制、电池状态管理及其与整车控制的协调。
本文的结构如下。第二节介绍了汽车的控制策略。第三节讨论电机控制系统,包括驱动电机的选择、换相和电机运行状态的控制。第四节介绍了电池管理系统(BMS)的结构。在第五节介绍的是TTCAN通讯网络。第六节是总结。
整车控制器设计
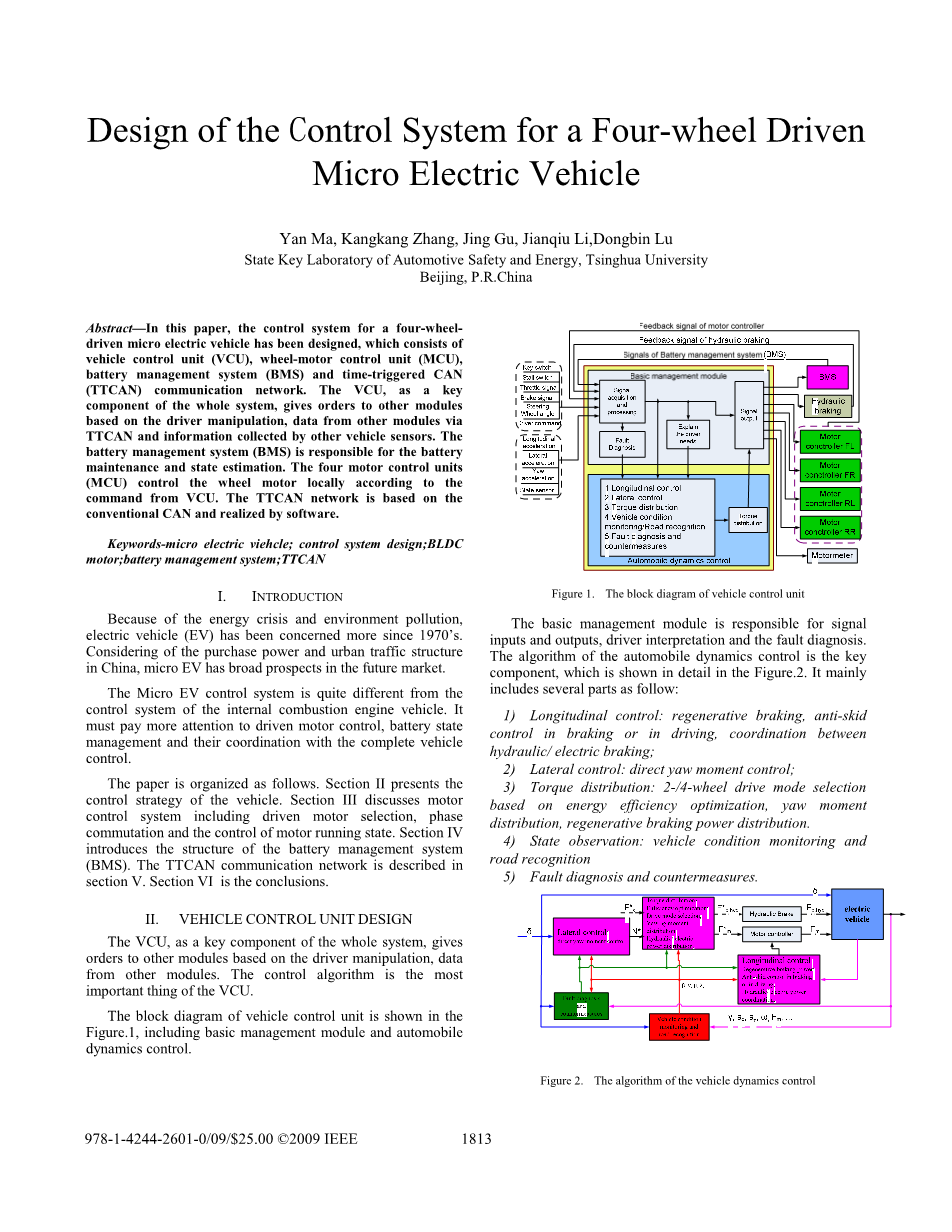
VCU作为整个系统的一个关键组成部分,根据驾驶员的操纵情况、其他模块的数据,发送命令操纵其他模块。控制算法是VCU最重要的部分
图1所示为整车控制单元框
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[136704],资料为PDF文档或Word文档,PDF文档可免费转换为Word

