英语原文共 47 页,剩余内容已隐藏,支付完成后下载完整资料
Distributed Large-Scale Dimensional Metrology
分布式大尺度计量学
3.3MScMS-II:基于IR的分布式计量系统 2
3.3.1工作原理 2
3.3.2数据处理和细化 4
3.3.3定位算法 5
3.3.4原型开发和性能评估 15
3.3.4.1原型描述 15
3.3MScMS-II:基于IR的分布式计量系统
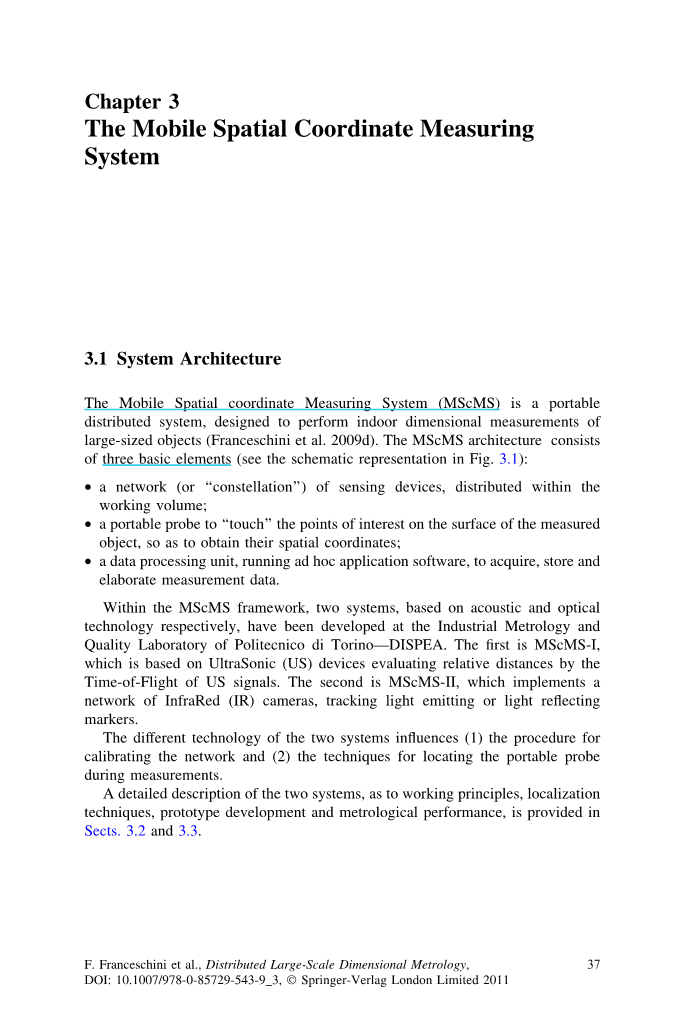
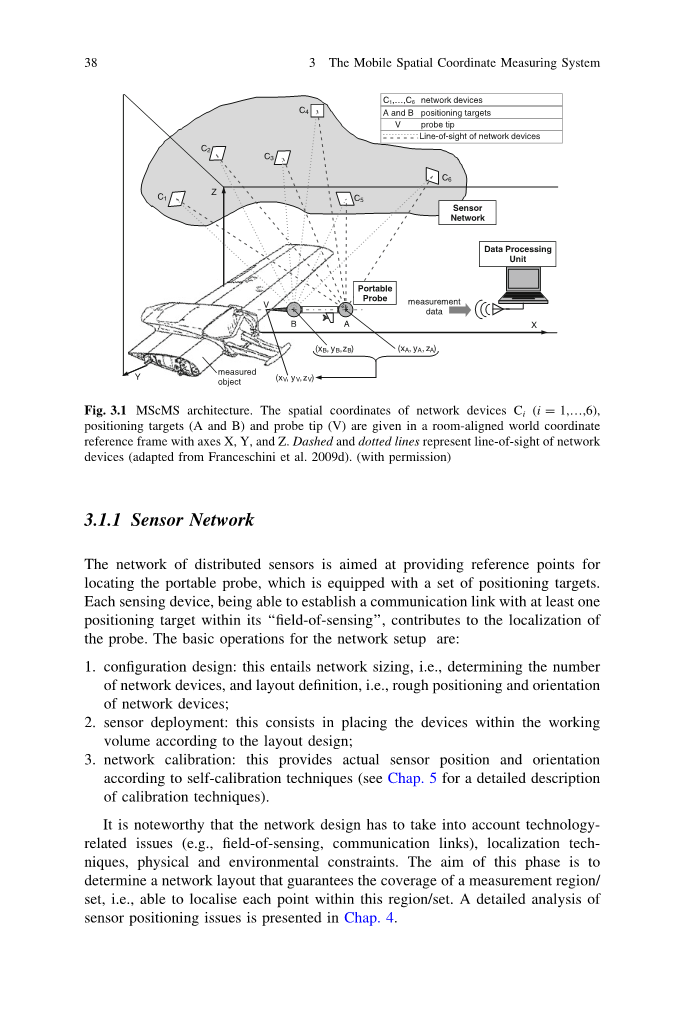
MScMS-II是一种利用分布式红外光学技术的室内坐标测量系统。作为MScMS-I,该系统由三个基本单元(图3.16)组成:一个无线红外摄像机网络(适当分布在测量体积内以估计参考定位目标的3D坐标),一个便携式无线和无臂探头(配备两个目标,以便“接触”测量点),一个数据处理系统(使用蓝牙连接来获取和精细化由每个网络节点发送的数据)。
图3.16
MScMS-II架构。虚线和虚线表示光学感测装置(,...,)与装备便携式探头的参考目标(指示为A和B)之间的视觉链接。实线表示在每个节点和数据处理单元之间建立的蓝牙连接。通过该无线链路,每个摄像机将可见标记(,)(i = 1,...,4和j = A,B)的2D坐标发送到处理单元。装备便携式探头的标记A和B相对于具有轴X,Y和Z的世界坐标参考系统被定位。然后计算探针顶端V的空间坐标(改编自Galetto等人2011)。 (经许可)
3.3.1工作原理
分布式网络由无线光学传感器装置组成,每个光学传感器装置能够在其“感测场”中与可见的光学标记建立视觉链接。几种类型的光学传感器可用于执行主动跟踪和被动跟踪。这种基于摄像头的系统,工作在红外光谱,能用于跟踪发光源(主动跟踪)以及反射标记(被动跟踪)(图3.17)。
图3.17
在基于相机的系统中配备便携式探头的主动和被动标记的基本单元:a被动反射的球; b红外LED
主动跟踪是基于移动光源,由一组IR发光二极管(LED)组成,它们有自己的能源供应系统,并封装在由光散射材料制成的球体内。相反地,被动跟踪需要远程固定光源(如LED阵列),再加上摄像装置(参见图3.25),适当的照明工作体积,由此移动球面反光标记。
通用相机装置的特征在于其焦距和角度视场(FOV)。 角FOV通常表示为(2times;2),其中和表示水平和垂直方向上的半视角平面(见图3.18)。 另一方面,线性FOV被定义为在三维空间定位的固定位置的相机能看得见的那部分场景。 而线性FOV,用线性测量尺寸(例如,像素单位,毫米)随着距离的增加而增加FOV是常数,它通常用作规格参数。
相机位置由世界坐标参考系()中的相机投影中心Cequiv;(,,)的空间坐标来标识。 每个球形光源/标记M,其中心为位于中的坐标(,,)处,在图像中表现为亮点,由给定的相机设备在通用时刻捕获。 这相当于一个二维点P(,)在相机投影平面pi;,位于沿光轴距离的摄像机投影中心。2D像素坐标在图像坐标参考系(UV)中表示,具有主要点PP和轴线U和V上的原点。
根据可用技术,提供了感测装置的网络设备已经可以拥有实现随时计算的能力。 因此,每个设备可以分析图像并计算亮点的位置坐标(NaturalPoint 2010; Vicon 2010)。然后将该信息发送到DPU,DPU用这些信息,通过应用三角测量算法来重建任何光源/标记的三维位置。根据之前已知的探针几何形状和标记配置,3D坐标可以计算探针尖端触及的点(参见第3.3.3节)。
图3.18
照相机装置的几何和工作原理。半视角和分别表示水平和垂直平面中的角FOV。
水平和垂直方向上的线性FOV分别用和表示。浅灰色区域表示相机物理上可见的体积或“感测场”。其中回射标记物是可见的并且可由相机装置追踪的物理体积。这个体积,根据与追踪能力相关的最小距离,与可视能力相关的最大距离定义,它的大小取决于感测硬件和标记的大小。应当注意,3D标记位置M和相机投影中心C根据房间对准的世界坐标参考系()来定义,而2D标记投影P是指局部图像坐标系,它起源于PP,并且具有轴线U和V。原点PP是原点,即光轴与投影面pi;之间的交点。
3.3.2数据处理和细化
数据处理硬件由2.5 GHz计算机平台完成,并连接到一组通过无线电连接的红外摄像机。假设每个相机确定IR点在其视平面中的2D坐标,通过计算机平台的嵌入式实时跟踪能力有效的节省了用于执行图像分析和位置坐标识别的计算时间。根据硬件和软件的配置,可由单个PC单元管理最大数量的IR传感器。一种模块化方法,基于多个处理单元共享不同摄像机的信息,可以实现处理扩大了的工作量。
正如在Sect3.1的软件架构的讨论中所提到的。处理单元管理布局评估、系统校准、三维点定位和数据处理程序。根据给定的网络配置,校准块实现了摄像机自标定算法(Svoboda et al. 2005)。从相机跟踪引擎2D输入单个反射标记(校准标记)的位置估计,随机移动在工作空间内的k个未知位置,它提供摄像头位置和方向以及相机内部参数(例如焦点)长度,图像中心的坐标和透镜畸变模型的参数。定位位于未知坐标处的校准的产品(校准方块),只要它们在工作容积内,校准工具执行相机对准和缩放到用户定义的坐标参考系(见图3.19)。然后根据数字摄影测量原理,该信息由定位算法用于执行测量点的3D重建。 数据处理软件工具,被设计为具有实现系统灵活性,提供执行单点坐标测量,距离测量以及几何重建的能力。
3.3.3定位算法
通用标记的3D坐标可以通过共线方程描述,作为相机技术参数,位置和方向的函数,将相应图像点的2D坐标映射到第i个相机投影平面上。共线方程表示几何条件,在该几何条件下,3D点,其在相机图像平面上的投影,和相机投影中心位于同一直线上(参见图3.20)。这些方程可以写成下面的形式(Mikhail et al.2001;Luhmann et al。 2006):
其中(见图3.20):
bull; (,,)是世界坐标中标记的3D坐标参考系,带坐标轴,和;
bull;(,,)是摄像机的投影中心的3D坐标世界坐标参考系;
bull;(,)是图像中心的坐标,即点的投影在摄像机图像平面上,在图像坐标参考帧中轴U和V;
bull;和是相机相关系数,需要转换焦距,从度量单位到像素,在水平和垂直方向。
图3.19
MScMS-II网络校准程序。 a校准数据采集:校准标记M在工作体积内随机移动k次。 b参考系统的对准和缩放:由3个标记(,和)组成的校准的产品用作参考目标。 (,)是第j个标记的投影的2D坐标(i = 1,...,4)上的像素值(j = 1,...,3)。 c校准输出:摄像机位置(指示通过正方形)和方向(由粗虚线表示)。
图3.20
一个通用的,基于摄像机的,在三维空间的定位问题。定义相对于有坐标轴线,和的世界坐标参考系相机投影中心equiv;(,,)和3D标记equiv;(,,)。相机图像平面(灰色区域)上的正( )和正方形(■)分别标识点和图像点。 它们的坐标(,)和(,)在图像坐标参考系中定义,其原点在图像平面的左上角。符号,和表示将世界坐标参考系统与本地(相机固定)坐标参考系统对准的三个顺序旋转,其具有在相机投影中心Ci中的原点,沿着光线轴的正方向定向的坐标轴轴,和,以定义一个平行于图像平面的平面。
比率/ ,表示为纵横比,允许处理非正方形像素(如果/ = 1);
和是总透镜失真,其允许校正测量的图像坐标以考虑由于成像误差而导致的与理想透视相机模型的偏差。校正模型通常应用于测量图像的坐标,应该考虑到透镜畸变效应。通常通过多项式序列考虑径向和切向畸变效应,由畸变系数向量定义(Brown1971; Heikkilauml; and Silveacute;n 1997)。
(其中k,l = 1,...,3)是旋转矩阵isin;的元素将世界坐标参考系和局部坐标参考系相关联,其具有在照相机投影中心中的原点和轴,和。该矩阵可以通过顺序地应用三个基本旋转获得,通常由围绕轴的角度给出,围绕轴,并且围绕轴。因此,角度旋转集合 =定义了在3D空间中的相机光轴的方向。
值得注意的是,作为网络校准过程的结果,每个摄像机通过一组内部参数(,,,,,),表示其技术特征,以及一组外部参数(,,,,,),表示它在世界坐标参考系的位置和方向。 我们引用读者参考.5进一步讲述有关传感器网络的校准过程的详细信息。
共线方程(方程3.11)可以以紧凑形式重写,忽略对失真效应的修正(==0)并参考齐次坐标,如下
其中:
bull;是非零比例因子;
bull;isin;是内部参数矩阵,定义为:
bull;isin;是外部参数的矩阵,定义为:
其中(,,)为投影中心在局部相机参考系中的坐标。
bull; isin;是所谓的相机投影矩阵。
定位问题在于根据不同相机的图像视图确定标记的3D坐标。根据式 3.11,如果只有一个摄像机视图可用,则只能确定到点的方向。因此,定位算法需要从至少两个不同的相机位置观察相同的点。 因此标记坐标可以是计算为两个空间方向的交点。
更一般地,给定校准的相机布局(即,个相机,已知内部和外部参数)集中于m标记,对于2D的每个m-uple像素坐标=(,),其中i = 1,...,和j = 1,...,m,定位算法必须提供相应的m个回射标记 (图3.21)。 本地程序,来自数字摄影测量的基本原理(Mikhail等人,2001),三个主要步骤:
1.找到不同图像视图中的像素之间的对应关系;
2.匹配不同相机视图的2D信息以恢复空间探测目标的坐标;
3.重建探针针尖的3D位置。
图 3.21
以上是表示使用四个相机( = 4)的设置来重建两个标记(m = 2)的3D位置时的定位问题的图形。(其中i = 1,...,4)和(其中j = 1,2)分别指第i个相机投影中心和第j个标记的3D坐标。点表示在第i个相机的投影平面上的2D投影。 它对应于相机平面与的投影线(即,穿过3D点和相机投影中心的线)的交点(改编自Galetto等人2011)。 (经许可)
步骤1:查找对应点
第一步骤在于重构2D像素坐标的矩阵.对应于相同3D点到不同相机的图像平面上的投影。由于通用标记M定位在未知的3D坐标,可能无法从所有相机看到(例如,因为在感测场或阴影之外),isin;其中2le;ple;。
对极几何,即两个视图之间的内在投影几何,已被用于关联来自多个相机图像的信息(Longuet-Higgins 1981; Hartley和Zisserman 2004)。 参考图3.22,两个2D像素之间的相关性。equiv;(,)和equiv;(,),由两个不同的摄像机(表示为和)检测,它们可以被认为是相同3D点M到摄像机平面上的投影的程度。
图3.22
对极几何原理。 和(白色圆圈)是相机投影中心,M(黑色圆圈)是3D点。 和(灰色圆圈)分别表示M在照相机和的投影平面(和)上的2D投影。 连接每个摄像机中心的线被称为基向量。 点和(黑色三角形)是两个相机的轨迹,即基本向量与相机投影平面的交点。 通过相机中心,3D点和2D图像点的平面被表示为极线平面()。与相机投影平面的交点是极线。 例如,虚线是与摄像机C2的投影平面上的点相关的极线,并且表示对应点(从Hartley和Zisserman 2004改编)的可能位置的集合。 (经许可)
根据对极几何原理,相机中心和,3D点M和相机投影面和中的对应2D像素和是共面的。共面条件可以通过迫使这些点位于公共平面(对极面)上的方程表示。将= [(-)(-)(-)]和= [(-)(-)(-)]表示为相机和的中心连接到3D标记M的向量,和b = [(-)(-)(-)]连接两个相机中心的向量(基向量),共面条件可以被表示为三重标量积:
其中项表示参考基向量的斜对称矩阵:
根据式 3.12,标记M和通用相机的投影中心之间的距离向量可以写为:
应用公式3.17限定公式3.15的系数的取值,然后共面条件可归结为一个矩阵的乘积:
其中基本矩阵F是给定对的相机和的内部参数(,)和外部参数(,,)的函数。
值得注意的是,由于传感器和环境噪声源和图像的离散化,完全共面性可能无法验证。 因此,搜索对应点的算法应该评估方程3.18的非零左边项:
定义其作为极线的极线平面与每个相机的图像平面的交点(参见图3.22中的),共面条件意味着摄像机的图像平面中的点,对应于摄像机的投影平面上的点,将位于极线上。
根据该原理,项表示点与点的极线的距离。由于大的距离导致像素相关失配和大的再投影误差,一种基于该距离的阈值方法以找到不同图像视图之间的对应关系已经实现了。据此,如果距离小于用户定义的无量纲阈值E(参见图3.23),则可以验证2D像素和之间的点对应性。
此外,在工作体积内可能同时存在多于一个回射标记物,这可能引起测量点恢复中的一些模糊性。在一些实际情况下,相对于IR传感器的探针定位及其取向可以对应于图像视图中的两个像素之间的非常小的距离。一种最小搜索方法已经实现了减少像素相关性中的误差。
根据这种方法,当相机的投影平面中的两个像素和验证阈值约束时,相机的投影平面中的点将与使距离最小化的点相关(参见图3.23)。lt;
全文共10102字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[144989],资料为PDF文档或Word文档,PDF文档可免费转换为Word

