
英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
精密三角高程测量的应用
跨河水准测量
刘冠兰
武汉大学测绘学院
武汉大学
武汉,中国
徐亚明
武汉大学测绘学院
武汉,中国
ymxu@sgg.whu.edu.cn
摘 要
参照《国家一、二等水准规范》,在二等跨河水准的测量(测距三角高程法)中,采用两台全站仪同时对向观测(通过改进仪器和测量手段,实现了同时交互观测),减少了大气折射的影响,简化了工作流程,提高了工作效率。分析了各分组交互观测的准确性,保证了最终结果的准确性,并提出了改进的工作流程。
关键词 精密三角高程测量;精密水准测量;跨河水准;测量机器人
1 概述
跨河水准测量是大地测量和控制测量中跨越江河水域进行精密高程传递的主要手段。根据《国家一、二级水准规范》,跨河水准测量的主要方法有光学测微法,倾斜螺旋法,经纬仪倾角法和测距三角高程法等多种方法。传统几何水准测量方法在高差起伏较大区域特别是跨越江河两岸进行高程传递时存在测量视线短,工作量大,易受天气条件影响等缺点,作业效率难以提高。三角高程测量具有快速、简便、受地形制约较少等特点,相关专家学者也对三角高程测量代替二等水准测量进行了深入研究 。同时国家的测量规范也对宽水域跨河水准测量场地的选择,技术要求,观测方法以及作业措施都有相应的规定,以保证跨河水准测量的实施精度,规范中规定跨河视线大于500米时,两岸仪器的视线距水面的高度不低于4radic;S米。这两岸仪器到水边的一段河岸的距离应该接近相等。两岸仪器所处的景观、土壤、植被也应接近相同[1]。由于规范论述的跨河水准测量中对向观测视线在基本一致的大气环境中,即为了保证两种景象的所处大气几乎相等,这样就可以减弱大气折射的影响。然而,事实上要做到这点是非常不容易的,这是需要花费大量的资源来满足需求的。本文在二等跨河水准的测距三角高程测量中,通过对仪器的改装以及测量方法的改进,实现了两台仪器间跨河视线的同时对向观测,大大削弱了大气折光的影响,也就是一种利用优化过的仪器进行精密三角高程测量的改进方法,该方法能实现两跨河点的近同步测量,且两跨河点高度接近相等。这样的改进降低了测量对现场条件的要求,简化了作业过程,提高了作业效率。
本文的结构如下:首先介绍了精密三角高程测量的原理。其次,以跨河水准测量为例,阐述了这种新的方法应用过程中的仪器改造和测量步骤即两台同型号的高精度自动照准全站仪进行同时段高低双棱镜组的对向观测,极大地减弱了大气折光、垂线偏差及地球曲率的影响,其中,高低棱镜的两组观测结果可进行相互检校;采用偶数边对向观测及起、末水准点采用同一对中杆来避免仪器高、对中杆高量测误差的影响。最后给出了计算结果,并对其精度进行了分析,提出了进一步改进的建议。
2 精密三角高程测量原理
三角高程测量是通过测量两点之间的距离和竖直角来确定高差的,该方法保持测站不动,避免了测站量高误差的影响,而三角高程测量的精度主要受高度角观测精度的限制和大气折光的影响。具有目标自动识别功能的高精度全站仪的出现,使三角高程测量精度的提高成为可能,能够满足高精度水准测量的要求[2]。精确三角高程测量原理是基于三角高程测量[3]的基本原理。它采用了两个具有自动照准功能的高精度全站仪。为了把棱镜固定在全站仪的手柄上,对这些仪器做了一些修改。经过改装后,照准棱镜就可以固定在全站仪的把手上,进行同时对向观测,当我们完成了两个全站仪同时对向观测的测量时,其高差计算公式如下为:
(1)
其中SAB和SBA分别是A和B两点间的水平距离,而alpha;AB和alpha;BA分别是从A到B和从B到A的竖直角度,iA和iB分别是这两个工具在A点和B的仪器高,VA和VB分别是这两处的目标高,KAB和KBA是大气垂直折光系数,R是地球的曲率半径。公式中的
是大气垂直折光对高差的影响,高程的偏差主要是由大气的垂直折光影响决定的。当我们在观测时,我们应当是同时观测,当我们同时对向进行竖直角观测时,可以认为对向观测的高差受大气垂直折光的影响很小或者不受大气垂直折光的影响,在最后的归纳公式中可以认为这一项大气垂直折光对于高差的影响近似为零,这样通过对向测量的方法就可以在计算中更加准确,出现的误差的机会更少一些,而且在这个影响因素中还存在着地球曲率对于测量结果的影响,地球曲率越大,则地球上两点的距离就越小,地球是球型,它的曲率半径在各处也是不相同的,但是对向法观测也避开了这个影响。因而与精密三角高程测量法中的中间法相比,对向观测的方法巧妙的解决了一些会因大气,天气等自然环境的影响而出现的问题。同时在一个测段观测中,对向观测的边为偶数条边,在测段的起,末水准点上,仪器到水准点的距离为米,树立起高度不变的同一棱镜杆,以避免量取仪器高和觇标高,要保证观察两个基准点之间的边必须是相等的。
在起点和终点的基准点上设置相同的高度不变的棱镜杆。因此,仪器的高度和目标的高度可以相互抵消。那么两个仪器之间的对向观测的高差计算公式为
(2)
起始站和结束站上的高差计算公式为
(3)
3 某河段测量的实施
3.1 观测路线的布设
合肥到蚌埠的高速铁路北起蚌埠市蚌埠南站南段,向南上跨京沪高速铁路后转向西至东芦山隧道,跨省道,合徐高速公路,水蚌铁路,其中高铁线路跨窑河,过水家胡,位置环境多以湖泊为主,对于跨河精密三角高程测量技术适用,其线路已经完成了跨河测量。在这一段线路中的某个河段,南北两岸线路附近分布着两个基准点(CPI014、CPI015),两个基准点之间的距离约为2公里,这个距离对于普通几何水准测量来说,视线长度太长,如果在河岸的一侧对另一侧进行观测时,距离遥远,存在的观测误差较大。这两点在连线方向离各自河岸约有200米也就是说每个点距离河流约200米,方向为CPI014到CPI015。两岸地势平坦,对于仪器的架设与近距离观测较为方便,其中两水准点地面处离水面高度约3米。在河岸附近设置两个临时点(ZS1, ZS2),这两个临时点尽量靠近岸边这样可以减小渡河观测侧的距离。用大木桩作为标点的位置支撑,然后把大钉子钉在木桩的顶端作为标志。CPI014,ZS1,ZS2和CPI015这些点的分布如图1所示。
图1跨河水准示意图
采用精密三角高程测量方法[4]测量从CPI014至ZS1的高差和ZS2至CPI015的高差。采用跨河三角高程测量方法测量了ZS1至ZS2的高差。
3.2 仪器的修改和觇标标志的设计
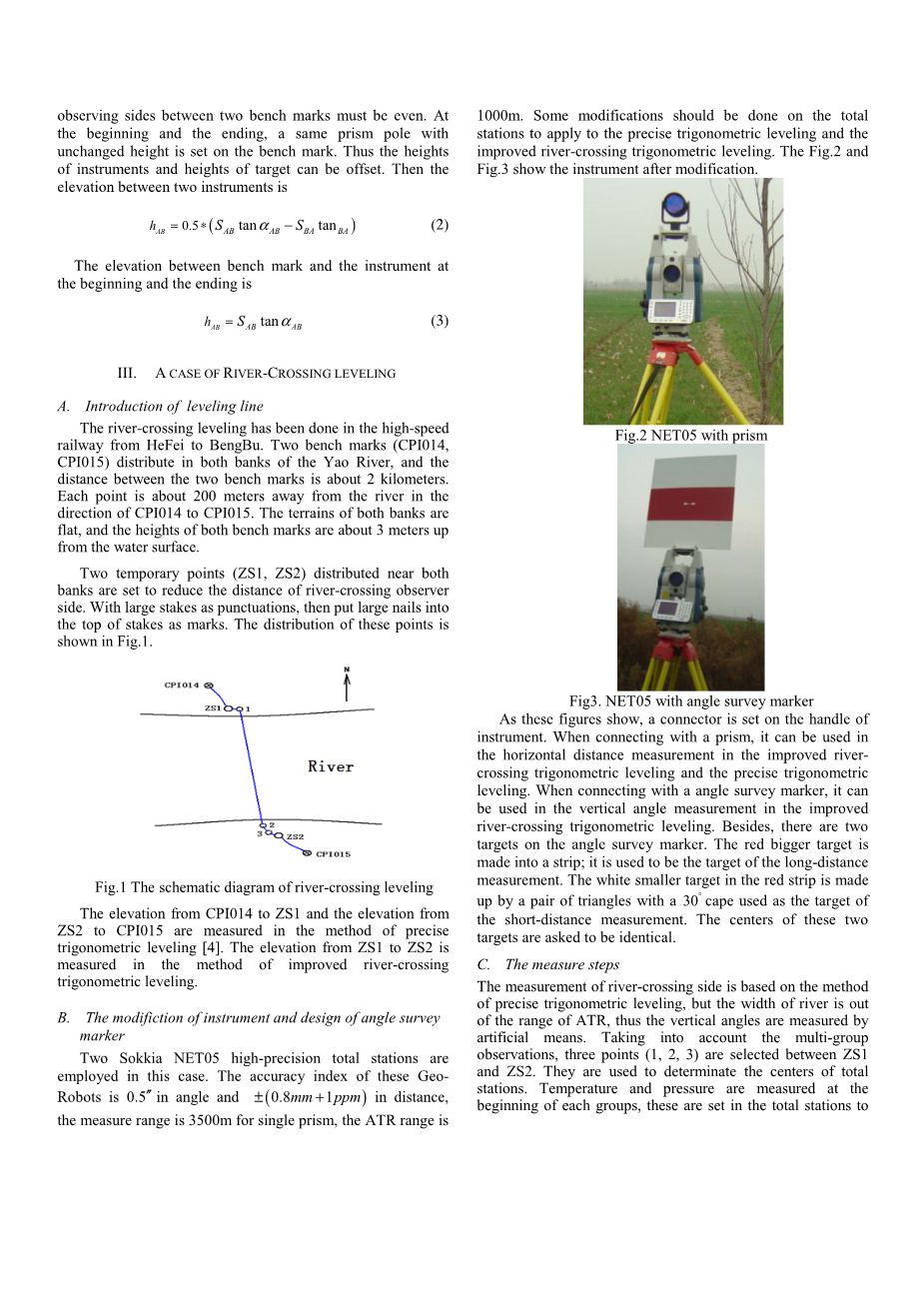
本例中使用了两台日本索佳 NET05高精度全站仪。这些测量机器人的精度指标为0.5Prime;测距精度为plusmn;(8mm 1ppm),单棱镜测距范围为3500m, 自动照准的测量范围为1000米。精密三角高程测量对仪器进行必要的改装及制作。在全站仪上做一些修改,以适用于精密三角高程测量和改进过的跨河水准测量。改装后的仪器如图2和图3。
图2 NET05 棱镜
图3 NET05 觇标
如图所示,在仪器的手柄上设置了一个连接器。当全站仪与棱镜连接时,可用于跨河测量的水平距离测量和精密三角高程测量方法的观测。结合角度测量标志即觇标,在仪器上安装觇牌可用于跨越河道的三角高程测量中竖直角度的测量。另外,角度测量标识也就是觇标上有一大一小两个标志。将红色较大的标志做成长条状(图3中所示为白色觇标上的红色条纹);它被用作远距离竖直角测量的照准标志。红色长条中的白色小标志是由两个对角为30度角的三角形组成,可以作为近距离竖直角测量的照准标志。 这两个标志的中心被要求是重合的。
3.3 测量方法
对于跨度大的河道,在进行跨河段水准测量时应该采用精密三角高程测量方法,但由于河道宽度超出了全站仪自动照准测量的范围,因此采用人工方法测量河流的垂直面也就是人工观测竖直角。考虑到多组观测,在ZS1和ZS2之间选择三个点(1,2,3)。它们被用来确定全站仪的中心位置。温度和压力都是在每组开始时要提前测量好,这些都是在全站仪上要设置的,以便对边长进行改正。
测量步骤示意图如图4所示。
图4 测量步骤示意图
步骤如下:
(1)起点水准点的测量
全站仪设置在点1上,棱镜杆设置在ZS1上(起点和终点基准点的棱镜杆高度不变,可以用同一根杆,可以保持长度不变)。应该测量两组完整的水平距离和竖直角并进行两测回观测。
(2)两个全站仪之间的测量,对向观测
在两个全站仪之间的测量中,分别进行距离观测和竖直角度观测。每个观测段进行竖直角度观测之前,先进行距离观测,用全站仪正倒镜法测量各测段的平距,也就是进行一套完整的水平距离测量,每次照准四次读数。最后的水平距离是取这八次距离读数的平均值。
竖直角度观测如下:
a)分别在点1和点2设置全站仪,观察全站仪1与全站仪2之间的竖直角度,瞄准全站仪2上的角度测量标志。一个测量组由四组完整的竖直角度测量和四个读数组成。同一组和同一面每次读数之间的误差为2秒。每组计算出的竖直角度差限制在5秒内。以全站2上的角度测量标志为目标,测量全站仪2至全站仪1的竖直角度。这些是由一组观察组成的,并且作为第一组观测。
b)改变全站仪1的仪器高度,可以通过升高或降低仪器来实现,测量起始台标ZS1的竖直角。然后改变全站仪1和全站仪2的对向观测的顺序,同样观测4个测回,再做步骤a)。观测的数据作为第二组观察。
c)重复步骤a)和步骤b),共获得8组观察结果。测量过程中只改变全站仪1的仪器高度,全站仪2的仪器高度不变。
d)测完8组后,将全站仪从点1移动到点3,在点2和点3之间做对向观测仍然是观测觇牌。因为距离很短,它只需要两组完整的测量值从2到3,从3到2,也就是需要观测两个测回。
(3)终点水准点的测量
全站仪设置在点3上,棱镜杆设置在ZS2上。应该测量两组完整的水平距离和竖直角度,要求进行往返观测。采用精密三角高程法测量了CPI014至ZS1的高差和ZS2至CPI015的高差。距离和竖直角观测都采用NET05 棱镜由全站仪自动照准进行观测,并进行往返观测。观察方法相似,所以不再详细介绍。
3.4 测量数据精度分析及结果
对外业采集的数据进行计算并分析精度,按照《国家一、二等水准测量规范》,在二等水准测量中,每公里的全中误差在二级水准测量中为2毫米。在这种情况下,跨河段的总厂约为1.9千米,测量中误差应该不大于
Mf = plusmn;2radic;1.9 = plusmn;2.75mm
该测量结果是8组观察值的平均值,然后是每组测量中误差应该不大于
MDelta; =plusmn;2.78radic;8 =plusmn;7.78mm
两组间的最大允许误差值为
往返测量CPI014至ZS1的高差及ZS2至CPI015的高差结果如表一所示。
表1 从CPI014到ZS1和从ZS2到CPI015的高程观测
|
测段 |
CPI014-ZS1 |
ZS2-CPI015 |
|
往测高差(m) |
-0.95460 |
0.58305 |
|
返测高差(m) |
0.95425 |
-0.58310 |
|
平均高差(m) |
-0.95443 |
0.58308 |
|
往返互差(mm) |
0.35 |
0.05 |
跨河段8组观测结果见表2。此外,这8组高差平均值为0.63317米,中误差是1.72毫米。
表2 跨河段8组观测高差
|
组号 |
高差 (m) |
与平均值的差异(mm) |
|
|
1 |
0.62569 |
-7.48 |
|
|
<!-- 剩余内容已隐藏,支付完成后下载完整资料
资料编号:[409503],资料为PDF文档或Word文档,PDF文档可免费转换为Word |
您可能感兴趣的文章
- Tienstra对等式约束平差解法的计算复杂性分析外文翻译资料
- 用NDWI和MNDWI方法检测城市地区地表水体的变化外文翻译资料
- 通过长时间序列COSMO-SkyMed SAR数据利用非线性PS-InSAR 方法揭示武汉的地表沉降状况外文翻译资料
- 基于时序Insar的伊朗库尔德斯坦大气相位屏估计外文翻译资料
- 利用Landsat数据对越南东北亚热带地区的农村城市化和土地利用变化进行监测和测绘外文翻译资料
- 用以代替精密水准测量的三角水准测量的研究与应用外文翻译资料
- 将航空斜图像与陆地图像相结合,以优化城市地区的建模外文翻译资料
- 基于卫星数据的1976-2016年黄河三角洲湿地景观格局动态变化外文翻译资料
- 三维城市模型在土地管理中的应用外文翻译资料
- 基于InSAR对热岩溶沉降进行遥感测量外文翻译资料

