英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
用以代替精密水准测量的三角水准测量的研究与应用
摘要:针对在地形复杂地区进行精密大地水准测量的低效率,我们提出一种精密三角水准测量(PTL)法以代替一级二等水准测量。首先,我们分析了单向三角水准测量的误差并一一列举出了改正这些误差的相应方法。然后,我们提出了将同时对向观测与蛙跳法结合起来以减少大气折射影响的PTL实用公式。此外,PTL法使用两台自动化全站仪来完成一至多次相对观测从而避免量取仪器高。最后,使用PTL法进行了两个实验;一个是跨河精密水准测量,另一个是高原精密水准测量。结果表明,在25千米的水准路线中,相较于精密几何水准测量,PTL的每千米标准差是,低于,证明PTL能够达到一级二等水准测量的精度。
关键词:精密三角水准测量(PTL);同步对向观测;一级二等水准测量;自动化全站仪。
一、介绍
虽然精密几何水准测量是测定基准点间高差最可靠的方法,但它在地形复杂地区是费时的。为了提高它的效率,自动化水准仪的研究于1983年被提出,随后1990年诞生了第一台数字水准仪。然而,精密水准测量中数字水准仪的视线长度被限制在50~60米,在山区甚至更短,全站仪的视线长度能达到数百甚至数千米,而且三角水准测量也能够测得两点间的高差。在全站仪问世以前,角度测量的精度很低,限制了三角水准测量的应用。随着光电以及自动化技术的发展,莱卡于1998年创造出具有高精度测角和自动照准功能的TCA全站仪。因此,使用自动化全站仪实现精密三角水准测量在理论上是可能的。2005年,张提出严密三角水准测量准则并证明了在误差改正之后该准则的精度能够满足一级水准测量的精度要求。然而,三角水准测量中主要的误差源——大气折射的影响很难被测定。大气折光系数可以使用光电高程导线测距测定或使用温度分层模型估算。然而,大气折光系数并不是一成不变的,它总是随着地面上视线高度的变化而变化。找一个灵活的方法来抑制大气折射的影响是很有效的,例如蛙跳法和同步对向法。这些方法通过改善单向三角水准测量的观测过程从而很好地减弱了大气折射的影响。
现如今,基于自动化全站仪的三角水准测量已被广泛运用于诸如地铁隧道和大坝的变形监测中。在本文中,我们介绍了一个实验以及PTL方法,应用于地形复杂地区的高差传递中,例如河流交错地区、山谷交错地区等等。该方法使用两台标准化智能全站仪来消除大气折光的影响。在对向观测中使用两台自动化全站仪观察偶数次以避免量仪器高。对向观测的条件是通过一个工件将棱镜附着在全站仪把手上,而近似同步观测则是通过数据通信软件在5分钟内完成对向观测。因此,PTL能够高效且精确地测定两基准点间的高差。
本文首先介绍了三角水准测量的原理和误差。接着介绍了改善三角水准测量精度的方法。随后,描述了PTL的原理和观测步骤。最后,演示了PTL的两个实验。
二、三角水准测量误差分析
1、三角水准测量的原理
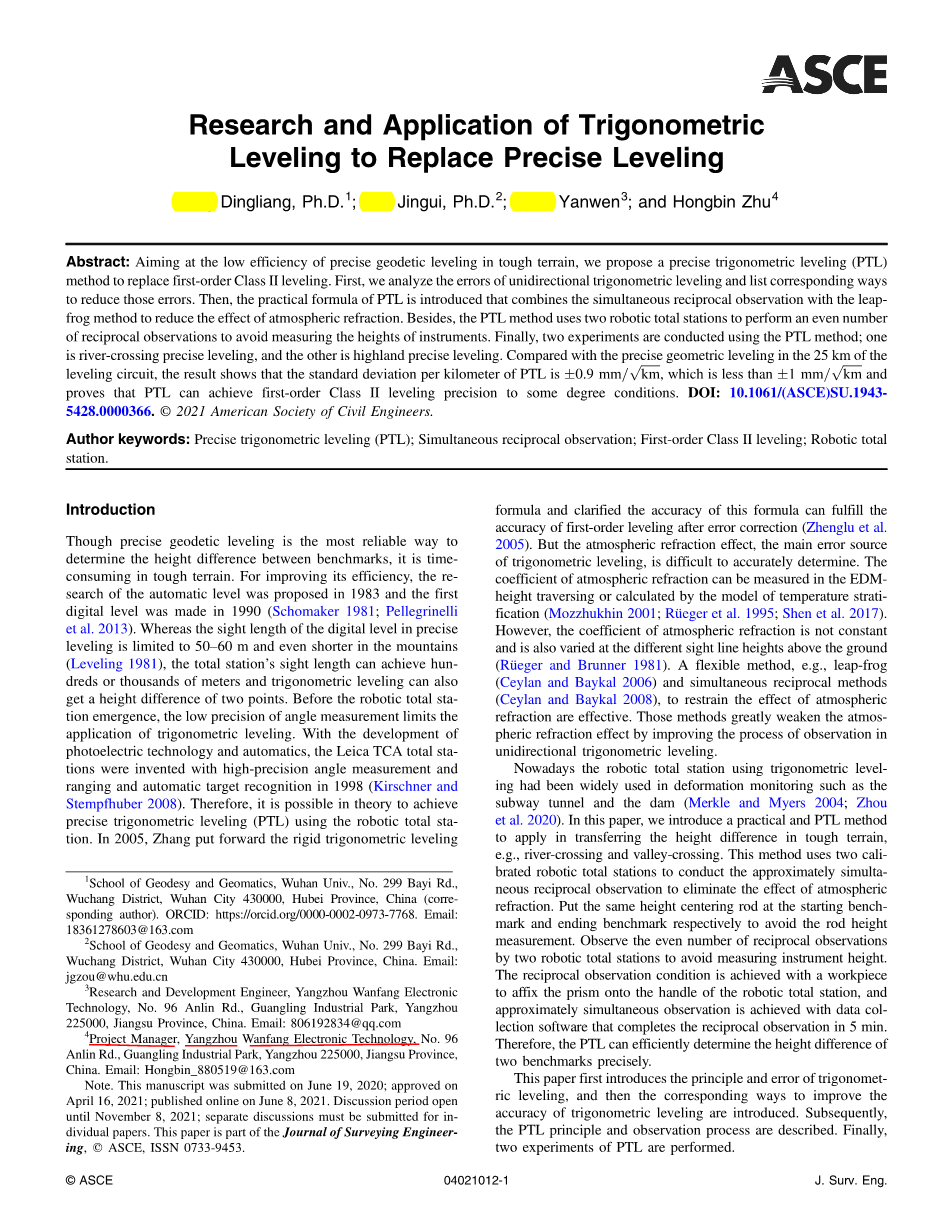
三角水准测量中的高差是通过计算目标间的斜距以及使用全站仪观测天顶角而得出的。然而,如果目标与全站仪间的距离较远,那么高差的观测将受到大气折光以及地球曲率的影响。图1展示了大气折光MN和地球曲率CE对高差观测值的影响。此外,点A和B之间的高差可表示如下:
(1)
s0和S分别表示全站仪与目标间的平距和斜距;K为大气折光系数,它是地球曲率半径与地球半径的比,通常为0.16;R表示地球曲率半径,约为6371千米;表示由仪器中心到目标杆的垂直角。仪器P和目标杆N分别被架在A和B点,它们的高度分别为和。
图 1 三角水准测量原理
2、三角水准测量的误差分析
根据误差传播定律,将公式1部分求导并对h12进行方差估计,表示如下:
(2)
其中和分别表示测距标和测角标准差;表示不确定的大气折光系数;和分别表示仪器高测量以及目标高测量标准差。
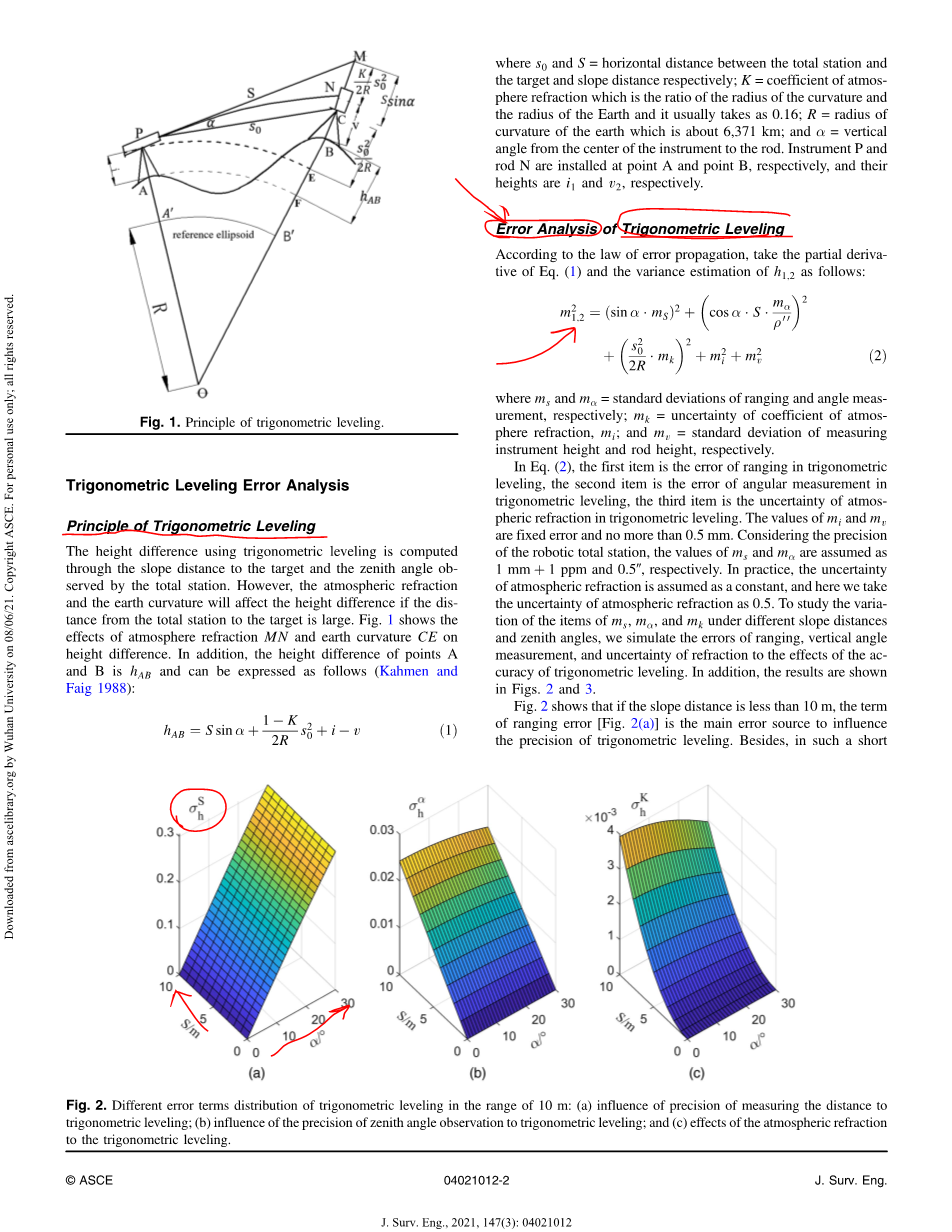
在公式2中,第一项是三角水准测量中的测距误差,第二项是测角误差,第三项是不确定的大气折光影响。和的值是固定误差,不超过0.5 mm。考虑到自动化全站仪的精度,和分别假定为1 mm 1 ppm和0.5',在实验中,假设不确定的大气折光是恒定的,这里我们取其值为0.5。为了研究、以及三项在不同斜距和天顶角下的变化情况,我们假设了测距误差、测角误差以及不确定大气折光对精密三角水准测量的影响。此外,结果展示于图2和图3中。
图 2 距离为10米时三角水准测量不同的误差分配项:(a)测距对精度的影响;(b)天顶角观测对精度的影响;(c)大气折光的影响
图 3 距离为1500米时三角水准测量不同的误差分配项:(a)测距对精度的影响;(b)天顶角观测对精度的影响;(c)大气折光的影响
由图2可知,当斜距小于10 m时,测距误差项是影响三角水准测量精度的主要误差源。另外,在这么短的测量距离内,垂直角测量误差与不确定大气折光对三角水准测量精度的影响可以忽略不计,因为它们的值小与0.05 mm。
然而,随着测量距离的增加,不确定大气折射迅速增大并成为影响精密三角水准测量的主要误差源,在1500 m的距离下,其误差能达到30 mm。同时,测角误差也随着距离增加而迅速扩大。相反,测距误差的增长微乎其微。因此,随着测量距离的增加,不确定大气折光和垂直角测量误差成为影响三角水准测量精度的主要因素。此外,为保证长距离测量时三角水准测量的精度,找到减少大气折光影响的方法是很重要的。
三、改善三角水准测量
1、蛙跳法
在部分三角水准测量的误差分析中,测得仪器高的标准差和目标高的标准差分别约为0.5 mm,这将影响三角水准测量的精度。为减小这种误差,可使用蛙跳法,它的原理由图四可知。将全站仪架设于A、B点之间,使用另一台全站仪分别观察A、B点上的觇标。通过公式1,A、O两点间的高差可表示如下:
(3)
其中表示仪器中心到觇标的斜距,表示平距;为竖直角,为仪器高,为目标高;为大气折光系数。
同时,通过公式1,点O、B间的高差可推演如下:
(4)
因此,A、B点之间的高差即和的差,表示为:
(5)
若在A、B点上架设相同高度的目标杆且=,则公式5可以简化如下:
(6)
在公式6中,仪器高和目标高两项被彻底消除了。因此,蛙跳法无需测量仪器高和目标高。
图 4 蛙跳法的原理
2、同步对向观测三角水准测量
从对三角水准测量误差的分析中得出,在使用三角水准测量确定分隔距离较远的两点的高差时,大气折光会对精度造成很大影响。如果大气折光影响被消除,那么三角水准测量将能在不可能的地区实现高程传递。为了修正该不确定因素,许多研究者都尝试得到计算大气折光系数的近似数学模型。然而,由于环境的复杂性与多样性,想要精确地得到任何时间、地点的大气折光系数是很困难的。同步对向观测法是减少大气折光影响的有效方法之一。对向观测的步骤如下:分别将两台全站仪架设于两点,然后两台全站仪同时测定到彼此的竖直角和斜距。由公式1可知,点1到点2的高差可表示为:
(7)
同时,由公式1可得,点2到点1的高差可表示为:
(8)
由公式7和8可得,三角水准测量的对向观测公式如下:
(9)
其中=。
在公式9中,如果对向观测在同时刻、同样环境情况、相似温度、气压及温度梯度下进行,由点1至点2以及由点2至点1的大气折光系数将近似相同;因此,大气折光系数的变化()几乎等于零。
四、精密三角水准测量法
1、自动化全站仪改正
蛙跳法表明,同步对向观测能减少大气折光影响且无需测量仪器高和目标高。因此,将蛙跳法与对向观测结合起来是PTL的基本概念之一。PTL通过架设具有相同中心高度的目标杆,并使用两台全站仪观测偶数边来避免测量目标高和仪器高。然而,实现同步对向观测是困难的,所以我们制作了一个工件(图6)并将其安装于全站仪的把手上,用来安装棱镜以实现对向观测,我们还设计了一个基于用蓝牙与全站仪连接的安卓智能手机的数据收集软件,来完成数分钟之内的一条边的同步对向观测。
图 5 对中杆
图 6 强制对中装置
软件为Tri-Leveling,它基于安卓平台,使用安卓语言。莱卡自动化全站仪的生产者为个人需求提供开发界面。通常,采用ASCII码命令来控制全站仪测量和获取斜距和水平角等数据是很容易的。这些采集到的数据以一种建立在安卓手机上的SQLite数据库的形式被保存在手机内存中。根据实际应用需要,我们已经通过斜距的数量级定义了观测集的数量,例如距离超过800米为8个观测集。最后,该软件能自动检测数据质量,如果观测集超过了规定的误差允许范围,数据收集将继续进行直到所有观测集的数据都满足精度需求。通常,使用我们的软件控制全站仪自动观测8个观测集仅需不到5分钟,因此,5分钟内的对向观测可被视作同步观测。因此,我们的软件能减少观测时间并确保实现PTL的精度。
除了数据采集的功能,我们的软件还有项目管理和数据管理的功能。项目管理和数据管理包含新建与删除功能。
图 7 连接工件
图 8 改装后的机械全站仪
2、精密三角水准测量的数学模型
图 9 PTL的对向观测
如图8所示,工件将棱镜与全站仪连接起来并将状态调整为同步对向观测。实际上,斜距比从棱镜中央到全站仪中央的距离(△P)要长得多,所以对向观测的距离近似相等,它们的差别为厘米级。此外,通过我们的数据采集软件,对向观测将在几分钟内结束,所以大气折光的影响在很短的时间内会变得很稳定,且TP1与TP2间的大气折光系数相等。由公式9可知,TP1到TP2的高差可表示如下:
(10)
事实上,测量部分分别组成了对向观测(如图9所示),最终的PTL数学模型由,以及三部分构成。通过公式10,可推断得出hTP1,TPN如下:
(11)
式中n=对向观测中的偶数。
实际上,从TP1到起始点的距离低于5-10 m,如图2(c)所示,大气折光影响可忽略不计。由TPN到最终点的距离也小于5-10 m。由公式1可得,和可表示如下:
(12)
(13)
图 10 PTL的测段
事实上,起始点与最终点和高度杆相同,且与的值相等。由公式11—13可得,TPL的最终公式可表示如下:
(14)
其中
由图8可知,,,由于架设在TP1和TPN点的全站仪是同一台主全站仪,且棱镜也是同一个,所以值变为。此外,公式14仅与垂直角测量和斜距有关。
3、PTL的误差分析
根据方差传播定律,将公式14求偏导,得到的方差估计如下:
(15)
在公式15中,对PTL的精度影响仅和测角和测距的精度有关,高精度自动全站仪是精密三角水准测量的保证。因此,我们选择了徕卡TM50自动化全站仪,它的特点是能够达到0.5Prime;的角度测量精度以及1 mm 1 ppm/km的测距精度。图10和图11分别描绘了在从10 m到1500 m的距离下,测角和测距的误差分布情况。在图中,意为一级二等水准测量的容许误差(),意为PTL的标准差,意为PTL的测角误差项,为PTL的测距误差项。在图10中,当测量距离低于10 m时,PTL的标准偏差取决于,其数值大约为0.1 mm,可以忽略。在图11中,距离首次突破50 m,此时PTL的标准偏差取决于。无论测量距离是小于10 m还是低于1500 m,PTL的标准偏差都在一级二等水准测量的限差要求范围内。
图 11 距离为10米时PTL的误差分析
图 12 距离为1500米时PTL的误差分析
4、数据收集
图9展示了从一个基准(起始点)到另一个基准(终止点)的观测路径。路径由两条单向观测和数条对向观测组成。对向观测工作由两台自动化全站仪交替进行观测,例如当主全站仪从TP1移动到TP3时,预备全站仪从TP2移动到TP4,等等。从主全站仪到基准点的单向观测长度低于10 m。此外,主全站仪与副全站仪之间的对向观测长度低于1500 m。全站仪的观测顺序已经通过图9利用数字和箭头展示出来。
表 1 测站数量与斜距之间的联系
表 2 PTL数据收集的容许值
图 13 PTL法长江跨江水准测量实验
事实上,进行同步对向观测是很困难的。得益于自动化目标可以自动识别机械全站仪,一次观测仅需14s。因此,基于蓝牙通信协议,我们依赖安卓终端上安装的软件来控制机械全站仪并自动收集信息,包括竖直角、斜距等。所以,对向观测的步骤可以在1-5分钟内结束,这可以被视作同
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[587266],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- Tienstra对等式约束平差解法的计算复杂性分析外文翻译资料
- 用NDWI和MNDWI方法检测城市地区地表水体的变化外文翻译资料
- 通过长时间序列COSMO-SkyMed SAR数据利用非线性PS-InSAR 方法揭示武汉的地表沉降状况外文翻译资料
- 基于时序Insar的伊朗库尔德斯坦大气相位屏估计外文翻译资料
- 利用Landsat数据对越南东北亚热带地区的农村城市化和土地利用变化进行监测和测绘外文翻译资料
- 用以代替精密水准测量的三角水准测量的研究与应用外文翻译资料
- 将航空斜图像与陆地图像相结合,以优化城市地区的建模外文翻译资料
- 基于卫星数据的1976-2016年黄河三角洲湿地景观格局动态变化外文翻译资料
- 三维城市模型在土地管理中的应用外文翻译资料
- 基于InSAR对热岩溶沉降进行遥感测量外文翻译资料

