
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
使用模糊逻辑的基于PLC的速度控制器的设计,实现和仿真
摘要:本文介绍了使用通用可编程逻辑控制器对电机或发电机组进行速度控制的模糊方法的成功实现。通过改变电枢电压对直流电机的速度控制是目前工业中的一种常见做法 时间。 此外,通用PLC是用于控制发电厂和工厂的最常用的控制器。然而,该工作建议了一种用于提高现有通用PLC的利用水平的方法。 实际上,要求PLC使用精确有效的模糊方案执行速度控制的附加任务。 利用基于模糊方法的控制方案,速度控制算法从标准PLC梯形逻辑内完成。 此外,对于典型的11MW蒸汽涡轮机的调速器进行模拟。
关键词:模糊逻辑,速度控制
1.引言
在涉及旋转机械的所有应用中的大多数中,必须存在速度控制器以控制装置的速度。 目前,大多数速度控制问题,包括旋转或线性,使用专用的基于数字或微处理器的控制器实现PID控制方案的一些组合。 基于PID的控制器通常是非常可靠的,然而,它们通常具有可以显著降低其性能的若干限制。 这些限制包括:
通常,PID速度控制器使用专用控制器来实现,这可能增加整个控制系统的成本。在过程环境不断变化的应用中,标准PID控制器的响应可能受到严重限制。 这种环境的一个例子是蒸汽涡轮机/发电机,其中温度,水平和压力不断地改变系统的动力学。 PID控制器通常在高度非线性的情况下受限,并且不能以获得可接受控制的所需精度做出响应。PID控制器需要系统设计者开发控制过程的广泛的数学模型,这并不总是容易实现的。
通过在通用可编程逻辑控制器内实现控制方案,可以容易地消除对作为PID控制器的主要缺点之一的独立设备的需要。利用PLC作为主要控制是工业工厂中的常见做法。 然而,为了从PLC内完成PID控制,人们经常需要一个PID协处理器,该协处理器可以用不同于标准PLC梯形逻辑的语言编程。 这些协处理器通常从除了PLC制造商之外的公司获得,可以增加大量的总PLC成本,因此不利于降低控制系统的成本。 此外,控制器的性能仍然受到PID控制的限制的阻碍。
另一方面,在过程相对较慢(变化发生在毫秒级而不是微秒级)的高度非线性情况下,基于模糊方法的控制方案通常允许比它们的典型PID对应物更简单的控制器设计。 可以使用模糊控制方法来实现精确和响应的控制,而不需要高度涉及的数学建模和附加的PID协处理器模块。
因此,我们的想法是消除对这些独立控制器的需要,并使用PID以外的控制方案在PLC内实现速度控制器。 由于使用通用PLC的大多数过程类型应用的本质上慢的性质,模糊控制方法提供了PID控制器的期望的替代。
2.模糊控制
模糊控制方法基于加利福尼亚大学伯克利分校的Lotfi Zadeh于1965年提出的模糊集合的想法。 模糊系统是基于知识的(或基于规则的)系统,其使用一组IF-THEN形式的模糊规则来确定给定一组输入的控制器的输出。 与传统方法不同,控制系统工程师不必为设计成功的控制器而关注的过程开发广泛的数学模型。 当设备模型是高度非线性的并且描述设备的微分方程不容易获得时,这是特别节省时间的。 在基于模糊的控制中,不是使用数学来建模工厂,而是使用语言术语来创建模糊子集,模糊规则库和模糊输出。 模糊规则库是从关于要控制的设备或过程的一个或多个“专门”知识开发的。
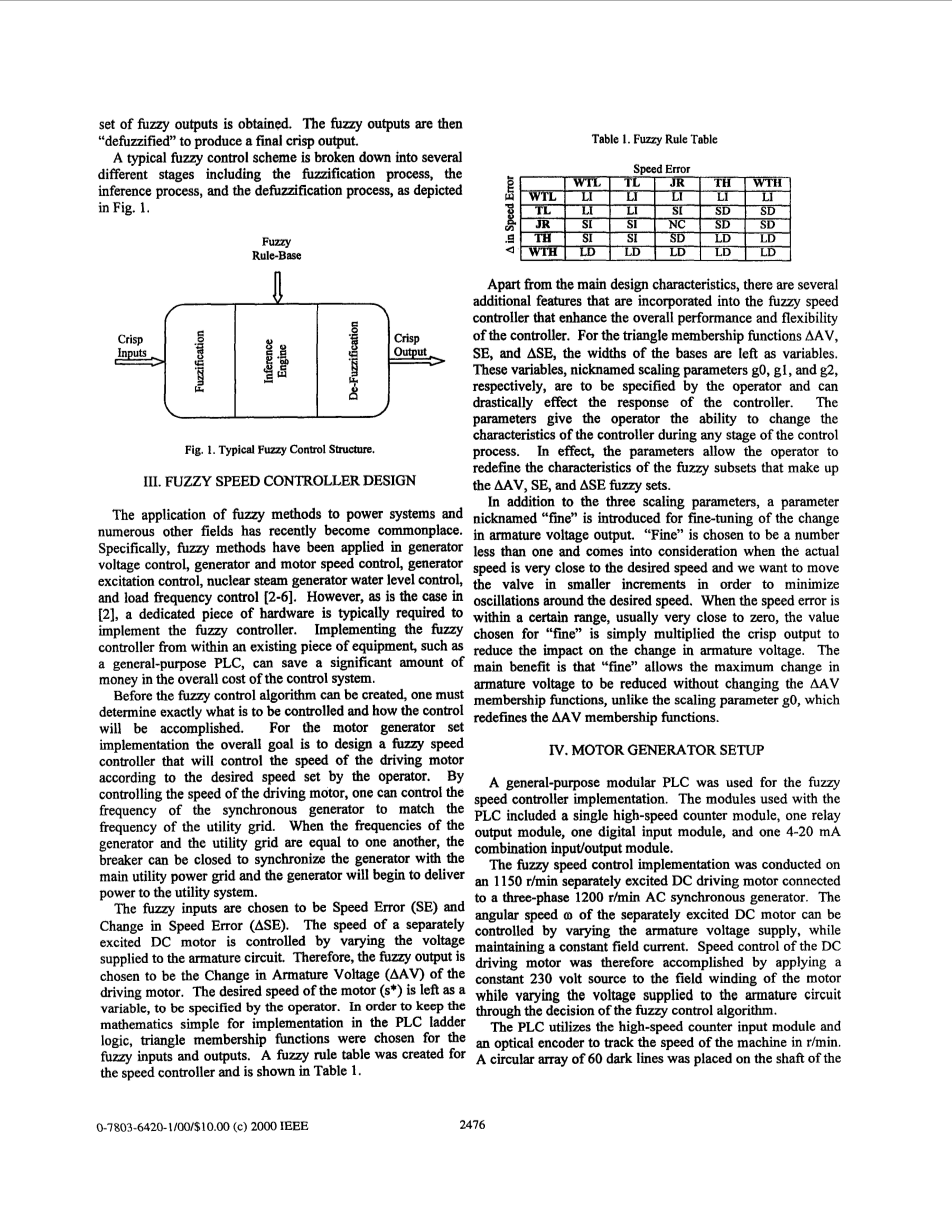
对于一般的模糊控制器,一个或多个清晰输入被带入控制器并且使用模糊隶属函数“模糊化”或映射到模糊领域。 一旦模糊化,推理器就将模糊规则库应用于输入,以确定控制器应如何反应并获得汽笛输出。 模糊输出然后被“去模糊化”以产生最终的清晰输出。
典型的模糊控制方案分为几个不同的阶段,包括模糊化过程,推理过程和解模糊过程,如图1所示:
图1 典型的模糊控制系统
- 模糊控制器设计
模糊方法在电力系统和许多其它领域的应用最近已经变得较为普遍。特别地,模糊方法已经应用于发电机电压控制,发电机和电动机速度控制发电机励磁控制,核蒸汽发电机水位控制和负载频率控制。 然而,在这种情况下,通常需要专用硬件来实现模糊控制。从诸如通用PLC的现有设备中实现模糊控制可以在控制系统的总成本中节省大量的资金。
在可以创建模糊控制算法之前,必须精确地确定要控制什么以及如何完成控制。对于电动发电机组而言,总体目标是设计模糊速度控制器,这个控制器将根据操作者设定的期望速度控制驱动电动机的速度,通过控制电动机的速度,一旦可以控制同步发电机的频率以匹配公用电网的频率。当发电机和公用电网的频率相等时 可以关闭断路器以使发电机与主公用电网同步,并且发电机将开始向其供电。
模糊输入被选择为速度误差和速度误差的变化。通过改变提供给电枢电路的电压来控制单独激励的直流电动机的速度。因此,模糊输出被选择为 驱动电机中电枢电压的变化,电机的期望速度留作由操作者指定的变量。为了保持数学上的简单便捷,在plc梯形逻辑中实现为模糊输入和输出选择三角形隶属函数。 我们为速度控制器创建了一个模糊规则表,如表1所示:
表1 模糊规则表
除了主要设计特性之外,还有几个附加特征被结合到模糊速度控制器中,以增强控制器的整体性能和灵活性。 对于三角形隶属函数Delta;AV,SE和Delta;SE,基底的宽度留作为变量。 这些变量,绰号缩放参数g0,g1和g2分别由操作员指定,并且可以极大地影响控制器的响应。 参数给予操作者在控制过程的任何阶段期间改变控制器的特性的能力。 实际上,这些参数允许操作者重新定义构成Delta;AV,SE和Delta;SE模糊集的模糊子集的特性。
除了三个缩放参数之外,还引入了一个名为“精细”的参数,用于微调电枢电压输出的变化。“fine”选择为小于1的数,并在实际速度非常高时考虑 接近期望速度,并且我们想要使期望速度周围的振荡最小化。当速度误差在可接受的范围内时,通常非常接近于零,为“精细”选择的值简单地乘以清晰输出以减少对 电枢电压的影响,主要有益效果是“fine”允许电枢电压的最大变化随着Delta;AV隶属函数的改变而减小,这与缩放参数g0不同,缩放参数g0重新定义Delta;AV隶属函数。
- 电动发电机设置
通用的模块化PLC被用来设计模糊速度控制器。与PLC一起使用的模块包括单个高速计数器模块,一个继电器输出模块,一个数字输入模块和一个4-20mA组合的输入/输出 模块。
在连接到三相1200r / min交流同步发电机的1150r / min单独激励的直流驱动电动机上进行模糊速度控制实施,可以通过改变电枢电压供应来控制单独激励的直流电动机的角速度omega;, 同时维持恒定的励磁电流。因此,通过向电动机的励磁绕组施加恒定的230伏特源,同时通过模糊控制算法的决定改变提供给电枢电路的电压,来实现直流驱动电动机的速度控制。
PLC使用高速计数器输入模块和光学编码器以r / min来跟踪机器的速度。将60个暗线的圆形阵列放置在DC电动机的轴上。 光学编码器安装成可以在它每次发生改变(亮到暗或反之亦然)时检测脉冲。 然后由高速计数器模块对脉冲数/秒来进行计数,并转换为r / min值。模糊算法中将该读数用作速度反馈信号。
模糊速度控制器实现的总体框图如图2所示:
图2 电动发电机组设置
模糊速度控制器的总体目标是允许操作者在三个单独的级中将驱动电机以及因此的同步发电机提高到同步速度。 对于该应用,构建了一个HMI面板,以允许操作者通过改变某些控制特性和调节速度控制器的设定值与PLC通信,而不改变PLC梯形图逻辑程序。 HMI通过RS-232串行通信链路与PLC通信,并可用于向PLC发送数据和从PLC接收数据。
HMI使操作者能够改变模糊控制器的期望速度。 操作员可以使用最多三个预设速度,“慢速”(400 r / min),“空转”(800 r / min)和“额定”(1200 r / min)来提高电机速度。 这些设定值是在梯形图逻辑程序中预先设定的,但是,在电动机工作范围内的任何所需速度可以很容易地在梯形图逻辑程序中预先设定并由模糊控制器获得。
另外,HMI允许用户定义三个隶属函数缩放参数g0,g1和g2.这些参数允许用户控制用于速度误差,速度误差变化和电枢变化的三角隶属函数的宽度 电压本质上,操作者可以通过改变这些参数来重新初始化每个模糊集的限定极限,操作者能够重新定义速度控制器特性,直到获得最准确和响应的控制器。
- 实验结果
下面介绍基于PLC的模糊速度控制器的几个实验的结果。 在每个实验中,选择三个模糊调整参数的不同值。 如果速度误差大于 25r / min,则剩余调整参数“fine”设置为1,如果速度误差小于 25r / min,则设置为0.1,如果速度误差小于 5r,则设为0.01 / min。改变三个隶属函数调整参数g 0,g 1和g 2以便确定它们对模糊速度控制器的整体响应的影响。 对表2中概述的四个案例研究进行实验。
表2 PLC速度控制器案例研究概要
情况#1具有理想的响应曲线。因此,将每个后续实验与这种情况进行比较。 对于每个实验,操作者试图将同步发电机的速度保持在400r / min持续30秒,800r / min持续30秒,以及1200r / min持续120秒。
g0 = 1.5,g1 = 20.0和g2 = 10.0的模糊速度控制器的响应曲线如图3所示:
图3 情况#1模糊响应曲线
如图所示,速度升至400r / min,并保持恒定大约30秒,当它上升至800r / min时,它也会保持恒定大约30秒,然后使速度上升 至1200r / min,这个阶段会保持恒定大约2分钟。
情况#2演示了改变缩放参数g0的效果。对于g0 = 2.2,g1 = 20.0和g2 = 10.0的模糊速度控制器的响应曲线如图4所示:
图4 情况#2模糊响应曲线
如图4所示,系统响应的影响越来越快速。并且该变化在400和1200r / min下产生过冲,而在800r / min时产生过冲和严重的波纹。 增加效应加宽了电枢电压变化隶属函数的宽度,从而加速了控制器的响应,同时使过冲和稳定时间(纹波)变得更糟。
情况#3演示了改变缩放参数g1的效果。对于g0 = 1.5,g1 = 50.0和g2 = 10.0的模糊速度控制器的响应曲线如图5所示:
图5 情况#3模糊响应曲线
如图1所示。 如图5所示,与情况#1相比,改变g1也影响响应。 然而,改变g1不如改变g0时那么严重。 g1的增加在400r / min时仅产生轻微的过冲,而速度从未达到800r / min的期望值。 增加g1有效地加宽了速度误差隶属函数的宽度,从而将-25和 25之间的间隔(与-10和 10相比)定义为“恰好”速度误差。
情况#4演示了改变缩放参数g2的效果。对于g0 = 1.5,g1 = 20.0和g2 = 50.0的模糊速度控制器的响应曲线如图6所示:
图6 情况#4模糊响应曲线
如图6所示,改变g2对速度响应几乎没有什么影响,除了在400r / min和800r / min的速度会有轻微的下冲。 然而,我们必须理解,改变缩放参数的效果不是一般的。 效果高度取决于隶属函数的数量,输入和输出以及要控制的过程的机械特性。
- MATLAB仿真
在实验室电动机/发电机组上成功实施模糊速度控制器后,研究了环境变化较大的更实际的应用。这个应用程序处理建议基于PLC的模糊速度控制器作为蒸汽涡轮机的执行。
对模糊调速器进行了几个MATLAB模拟。在每个模拟中,选择典型的1MW,4470r / min涡轮发电机作为要控制的过程。通过增加控制阀的百分比开度,使得更多的蒸汽进入涡轮机,从而使连接同步发电机与涡轮机的轴更快地旋转。因此,使用蒸汽涡轮机的运动方程,典型的6英寸蒸汽阀作为控制阀,以及涡轮机的转速作为反馈信号来模拟控制。
重复上述过程,进行了几种不同的模拟。然而,在这些模拟中仅观察到改变gl和“fine”的效果。对表3中概述的五个案例研究进行实验。
表3 涡轮速度调速器案例研究概要
模拟#1被确定为具有理想的响应曲线,因此,所有后续的模拟与模拟#1进行比较。对于模拟,期望的速度被设置为等于1200,2500和4470r / min。这些速度被选择,因为它们表示 为了产生更真实的模拟并在变化的条件下测试模糊速度控制器的性能,对于所研究的蒸汽涡轮机的慢滚动,空转和额定速度的典型值,每坠子引入 1r / min的随机误差的一秒。
模拟#1模糊速度调节器对于g0 = 10.0,g1 = 20.0,g2 = 10.0和fine= 0.1的响应曲线如图7所示:
图7 模拟#1模糊调速器响应曲线
如图7所示,涡轮机的速度上升到1200r / min,其中控制器将该速度保持大约60秒。 然后将速度斜升至2500r / min,其中控制器再次将该速度保持大约60秒。 最后,控制器允许涡轮机达到4470 r / min的额定速度。 只存在轻微的过冲和纹波,这是由于增加的误差。
模拟#2演示减少参数g0的效果。 模糊速度的响应曲线调速器g0 = 1.0,g1 = 20.0,g2 = 10.0,fine= 0.1如图8所示:
图8 模拟#2模糊调速器响应曲线
如图8所示,减速变化严重影响调速器的响应。 实际上,减小转速导致调速器响应性较低,因此引入严重的过冲,以及引入速度为4470r / min的稳定时间(波动)的增加。
模拟#3演示增加参数g0的效果。 模糊速度的响应曲线调速器g0 = 20.0,g1 = 20.0,g2 = 10.0,fine= 0.1如图9
全文共6240字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[145865],资料为PDF文档或Word文档,PDF文档可免费转换为Word

