英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
通过永磁直线电机使船舶操舵装置的直接驱动具有高推力与效率
摘要
承受能力,冗余性,以及空间,重量和节能减排都是在船上的主要问题。用于转向器(方向舵,滚稳定翼)典型油供电板载驱动器通常是繁琐的,有分量的,低效率和昂贵的设备,还需要一个沉重的维护负担。意大利海军最近提交了一个研究项目,目的是确定在替代创新型逆变器供电的全电力驱动系统,液压系统,新的执行机构不得不保证所需的动态性能,即非常高扭矩/力在非常低的速度,除了高承受能力,冗余和居多,高效率,本文提出了转向齿轮直接驱动的新高推力永磁直线驱动器通过一个适当的设计旋转棱镜耦合。机械和电气驱动被显示出来,并且对力,速度和效率的性能进行了分析,并与原来的液压系统相比,建议的制动器将通过在缩小规模的试验进行验证样机的研究计划的最后步骤。
关键词:执行器;效率;液压系统;逆变器供电驱动,直线电机,永磁;冗余;船舶;转向器
- 绪论
该电器厂的意大利海军总参谋部,MARISTAT办公室连同海军军备NAVARM2005年的总方向决定评估包括研究可行性和逆变器供电驱动器的船上更加密集型应用程序的方便性,深受各厂商推广。对船上设备仔细检查表明,在一些传统的油电驱动器使用时,逆变器供电的驱动器可能会产生显著节约能源,提高性能和效率作用。通过加压油送入液压执行器产生非常低的速度和极高的扭矩/力[1],但低效率,高维护的负担,以及工厂累赘和成本是薄弱环节。
罗马萨皮恩扎大学一个研究项目(ISO)[2]包括在军事研究国家计划致力于宇航的系,电气和能源工程(DIAEE),旨在确定替代方案解决全电动的机载系统的配备了经典的静液压传动装置。
在所有船上使用的常规油驱动器的广泛的审查后,研究主要集中在油为动力的方向舵和舵机设备,它在性能,效率,可维护性和控制一定的改善是预览作为可能获得通过全电力驱动的方法。这些设备还需要高冗余性,可负担性和可用性,因为它们是船的重要组成部分 [10]作为案例研究,对具体的设备进行了分析:
bull;方向舵舵机:埃特纳船舶HS180X2S舵
bull;稳定翼:Maestrale类的SFA-2-54
这项研究是在如下连续的步骤进行的:
a)对现有机载油为动力的设备的数据采集;
b)研究操作周期,效率,维护负担,并为每个部分的可能改进;
c)对全电动的替代品适合的建议设计;
d)然后,由海军对转向器直驱永磁同步直线执行(PMLSA)的详细设计替代品进行严格审查;
e)实验室样机在施工阶段(仍然)在实验测试。
本文介绍反相馈PMLSA直接通过扭矩臂联接到所述舵杆和一个适当的设计旋转棱柱接头[4]、 [9],提出机械的,磁性的高推力的概念,以及电驱动中详述结果表明,高推力力和低速性能可以得到,此外,与那些油驱动的相比,基于PMLSA驱动比原来更轻,体积小,高效。结构简单,模块化和组件冗余能提供更高的承受能力,降低维护。本文还提供了液压和全电动驱动之间的效率进行了详细的比较。对于此范围PMLSA的力电流的关系,功率和效率曲线的研究和解释。
第二节描述结构,操作及液压舵工厂的弊端。第三部分介绍了基于PMLSAs新的直接驱动概念。第四节总结了PMLSA磁,机械和电气情况。第五节比较液压和全电驱动的效率。第六节给出了稳定散热系统的解决方案。最后,附录介绍的PMLS的能源效率的理论模型。
- 传统的液压作动器
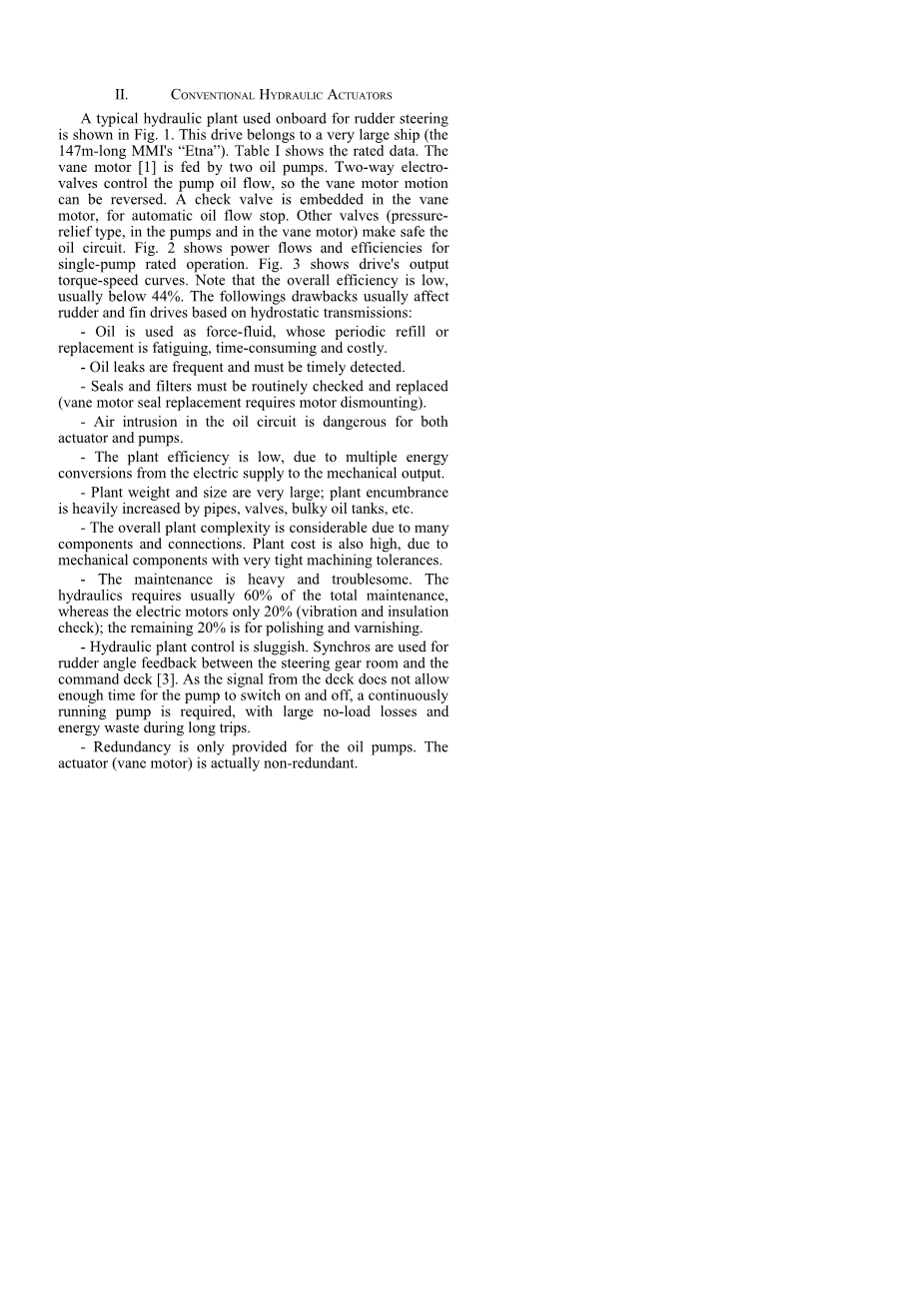
船上用于舵转向一个典型的液压工厂如图1。此驱动器属于一个非常大的船(在147米长MMI的“埃特纳”)。表一所示额定数据,电机两个油泵供油。双向电磁阀控制泵的流向,使电机反转。回流阀嵌入在电机,用于自动油流停止。其它阀(压力释放型,在泵和在叶片马达)使油路安全;图2示出了用于单泵额定运转功率流和效率。图3示出驱动器的输出转矩 - 速度曲线。需要注意的是整体的效率通常低于44%以下,以下缺点通常基于液压传动影响舵和FIN驱动器:
- 油可用作力流体,其定期再装填或更换是费时和昂贵的。
- 漏油频繁,一定要及时检测。
- 密封件和过滤器必须定期检查和更换(叶片马达更换密封件需要拆卸电机)。
-对两个驱动器和水泵来说油路空气侵入是危险的。
-由于从电力供应到机械输出多个能量转换,设备效率低
-设备重量和体积都非常大; 管道,阀门,体积大油库等设备在很大程度上提高了累赘。
- 总的设备复杂性是相当大的,由于许多组件和连接设备成本也高,因机械部件具有非常紧加工公差。
- 维护是重链和麻烦的液压要求通常为总维护的60%,而电动马达只有20%(振动和绝缘检查),剩余的20%是用于抛光和上漆。
-液压装置控制迟缓,用于舵机室和指挥舱的舵角反馈同步器从甲板信号没有足够的时间让泵打开和关闭,连续运行泵是必需的。
-仅供油泵的制动器(叶片马达)实际上是无冗余。
图1液压舵的驱动器
表1舵机HS180X2S额定数据
|
额定机械功率(两泵) |
26kW |
|
额定电力(两泵) |
59kW (440V, 60Hz) |
|
额定效率 |
44.3% |
|
额定转速(两台泵) |
0.77rpm |
|
额定工作转矩 |
322kNm |
|
最大工作扭矩 |
462kNm |
|
机械设计扭矩 |
604kNm |
|
总重 |
4300kg |
|
体积(不含管道) |
3m3 |
|
设备足迹(不包括辅助装置) |
9m2 |
3.以PMLSA为基础的直接驱动舵机
在本文和在[4],[9]为方向舵直接驱动的通过直接的力到转矩变换提出的概念示于图4的制动器的尺寸为替换在图1的驱动器。线性电动机是扁平双面PMLSA具有移动磁铁,纵向定子叠片和均匀分布的槽。该创新PMLSA功能34吨的峰值推力超过1.8米长行程[4],[9],以及上述目前市售的线性电动机[5]的最大额定值,图5示出了如下的制动器的剖面图,主要内容:
1.逆冲轴(铁磁实心钢)
2.钐钴磁铁
3.圆柱滚子滑动轴承,在双列
4.可拆卸的轴承支撑
5,直线轴承保持架
6.框架横向轴线(非磁性固体钢)
7.模块化定子铁栈(合)
8.盖拿着定子模块
9.模块化三相绕组
10.地面安装脚。
图2.图1中的驱动器的液压回路,单泵额定运行。
图3 驱动器1一个和两个泵的扭矩 - 速度曲线
该推压轴代替的由四行的圆柱滚子轴承保持,充分地倾斜以承受水平和垂直推力。辊子在螺纹上的推力轴滚道运行,以及固定到框架可拆卸支撑件。该定子是由若干单极对模块,图6中的模块被固定到盖板,它被锁定在框架轴螺丝,后者通过支持脚到地的力。这些模块易于卸下和更换。由于部件模块化,几个备用件是必要的。在图4中保持的滑动元件转动到臂,所以实现了旋转棱镜耦合。这种安排是比通常的方案与非枢转臂更好,由于推力保持平行于PMLSA轴,并在可动元件的反应转矩是较小的。常规制动可以在舵杆(带式制动器,块式制动器等)加入,或专门设计的设备可用于锁定扭矩臂(图4)。一个密封盖免受污染(灰尘,油污等)发头,整机很容易拆卸进行保养或维修。简单制造,加工公差可以保持较大,根据海军规则电动机的线性几何产生许多好处:
bull;众多轴承遍布转子的长度,更高的机械强度和减少磨损。
bull;电机的超薄和长形,使得它非常适合放置在船上。
bull;PMLSA重新调整大小对于不同的应用和力的要求是简单的,因为力是正比于活性气隙区域。电动机的宽度和长度可以按比例,与具有定子模块的数量在一起。
图4拟议转向器(毫米大小)
图5 PMLSA截面(尺寸是毫米)
定子模块
图6 PMLSA三维图,其中定子模块可拆卸
- PMLSA 选择
一个新型PMLSA的从头设计通过以下步骤进行:
1)通过使用有限元分析的高推力每体积输出模块化磁结构的设计;
2)用于直接力-扭矩转换的机械结构的设计;基于在舵杆所需的最大扭矩,该制动器的最大的力大小。
3)绕组的设计,同时在所需的电流密度和板上提供电源电压;反相器通过市场销售三相逆变器馈送。
A. 定子模块磁优化
一个非常高的绝对推力是模块优化的主要目标。由模块的几何参数变化用于力密度最大化FEM非线性静分析,图7中使用了自动优化软件(麦克斯韦V.14)的模块的绕组三相单层全节距与2极和每极相,授予高的MMF具有简单的结构一个时隙的类型。在图中PMLSA模块7是模拟在最大电磁水平推力的状态。该后者对应于表Ⅰ中的最大转矩,和由在槽的过载电流密度J,其应该在短期的基础上可以容易给出。5A /平方毫米的最大rms值已被选定。优化模块是。尺寸如在图8中,与力性能如下:
bull;单2D模块力:39.24kN/ m
bull;每单位体积力:1046.5kN/
bull;每个有效空气隙区域的单元力:157kN/
B. PMLSA机械选型
在图4中的制动器的尺寸可以从表I的最大工作扭矩看出,即462kN/m。所述PMLSA设有的157kN/的最大推力的选择舵柄长度为1.5m开始,并且最大转向角是37.5°,对于粗略选择,该力被认为是施加恒定长度的平均值杠杆臂的PMLSA总结如下:
最低杠杆臂: 1.19m
最大杠杆臂: 1.5m
意味着杠杆臂:1.345m
最大推力: 462kNm/1.345m = 343.5kN
气隙活动区域:343.5kN/157kN/m2 = 2.19m2
主动宽度: 0.5m
主动长度: 2.19m2/0.5m/2 = 2.19m→2.25m
最终长度已被舍入到包括模块的整数倍,p值=18(模块长度=0.25米,图8)。
C. PMLSA电气选型
所述PMLSA电气指数(NC)和在槽导体部(S)串联连接的相线圈,相电压(V)和电流(I)的选择,和逆变器的数目。该PMLSA在图4中具有p =18极对。三VSI逆变器提供具有减少推力波动低速运转平稳正弦电流,图9所需的力的高速性能从原机械图3获得相应的曲线。
所述PMLSA稳态电压平衡可以在标量的方式Vasymp;RsI omega;Psi;m,其中Rs为相电阻和omega;Psi;m被提出的是反电动势,由于电流是在电正交与磁铁磁通膜电势由于场导向矢量控制,并且由于在同步电抗的电压降会由于忽略到很低馈送频率和大的空气间隙的电压平衡可以在VF平面被写为:
(1)
R =tau;X/2pi;,tau;X=极对间距=0.25m:
(2)
图7优化模块中的磁通密度幅度
图8.优化定子三相模块尺寸
图9 PMLSA电枢绕组连接
Phi;M是磁通通过使用Phi;M= FR /3 PJA,其中A是槽区与一个线圈转相连,进行评价。该曲线必须通过在图10的最大功率点(VMP,FMP)中,才能获得未知参数之间的约束关系:
(3)
其中,LM是平均匝长度。通过选择的Vmax=440V/和NP=3,我们得到NC =229turns和S =2.67。
表2总结了PMLSA的评级。可用的最大速度(19cm/s)远高于原始驱动器的(13cm/s)。估计的大小和重量是有竞争力的。重量比HS180X2S系统的小,然而,对较小的驱动器来说看重成本是更好的。总体积(包括逆变器)是1立方米,这是液压系统体积的三分之一。由于没有配管,阀门等,并且由PMLSA紧凑,实际节省空间就更大了。
图10 V-F平面 PMLSA工作区
- PMLSA-BASED舵传动的效率
- 提高效率的比较
在所述PMLSA的功率和效率性能的尺寸,以取代HS180X2S系统理论上可估计考虑,在第一近似中,只有电阻下降.在旧的和新的驱动器之间的效率更好的比较,为无负载的各种工作点,额定和最大的力/扭矩,以及用于低速和高速已经进行了在表III,IV,从图3中通过使用F = T / B和V=omega;mb的转换。机械输出功率不变的两个驱动器,PM =Tomega;m= Fv等。表III,IV还报告PMLSA的频率f= V /tau;X(tau;X=0.25m是极间距),有效时隙电流密度J,欧姆功率P失去了在定子的三相绕组,和PMLSA的整体效率eta;PMLSA。P可以通过使用(A7)得出,并考虑进行定子体积:
tau;cu=6pbshs(L tau;x/2) = 0.
全文共6618字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[145863],资料为PDF文档或Word文档,PDF文档可免费转换为Word

