
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
将机器人植入你的智能家居系统:关于新框架的说明
一种即插即用的通信协议,用于智能家居系统中的任何机器人或设备
摘要
本文介绍了我们的IHSEV团队,以及我们针对智能家居设备和机器人的互操作性问题所做的初步研究。我们提出一个框架,使智能家居设备和机器人之间实现无缝通信。我们的框架主要依赖于xAAL协议,它允许任何类型的任何设备插入智能家居网络。我们最近扩展了xAAL,允许任何与ROS兼容的机器人集成到智能家居网络中。我们在一个已实现的应用中说明了这个框架的相关性:老年人摔倒时提供帮助的案例。
关键词
家庭自动化网络、互操作性、环境辅助生活、服务机器人、基于代理的智能家居、机器人辅助下的未来家居环境
1、IHSEV团队
1.1 IHSEV团队的目标和目的
几十年来,预期寿命的显著增加引起了人们对老年人生活质量的关注。不同国家的统计数据都显示,老年人只想长时间地呆在家里。欧盟正在鼓励创新和新的研究项目,使老年人能够独立生活。IHSEV团队(人机交互和虚拟环境的法语缩写)声称ICT可能能够缓解这种情况。我们团队正在评估使用类人机器人帮助丧失自主性的人的优缺点。我们探索技术解决方案,通过传感器和执行器网络,结合自然的、社会性的界面和移动系统,为用户提供无缝监控和帮助。因此,我们提出了一个机器人与智能家居交互的整体方案,为用户在家中提供更全面、互动性更强的帮助。
1.2智能环境研究装置
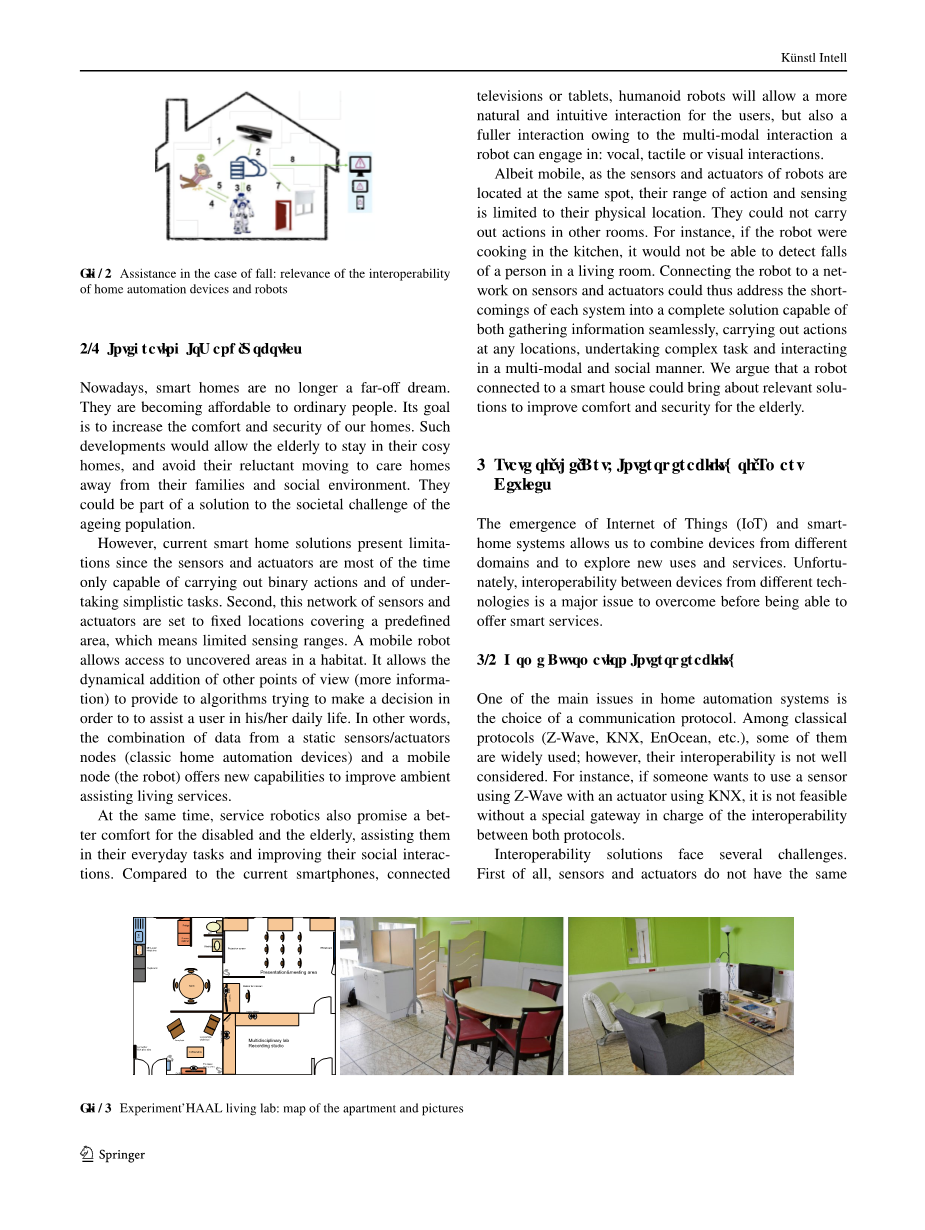
为了研究新科技对使用者日常生活的影响,我们选择在家庭中对使用者进行研究。为了便于技术与现实的协同设计,搭建了Living Lab的基础设施“实验室HAAL”(图2),通过实验来分析它们的相互作用和用途。它由三个房间组成,共70平方米,包括一个公寓,一个为参与实验者提供的桌子和一个观察室。有关“HALL实验室”的实验,由社会学家和生物
工程学家一起在辅助生活、远程医疗和远程护理的环境下,研究参与实验者的生活与活动。
现有设备和传感器包括:门禁入口、门传感器入口、冰箱、抽屉柜、柜体、烟雾探测器、状态探测器、压力传感器扶手椅、折叠式椅床、水流传感器洗脸池、洗手池、检漏池、无线遥控出水口、带引线管理的换向器、功耗传感器和覆盖整个公寓的感应地板。
1.3集成物联网和机器人技术
如今,智能家居已不再是遥不可及的梦想。它们正逐渐为普通人所接受。它的目标是提高我们家庭的舒适性和安全性。这些发展将使老年人能够住在舒适的家中,避免他们不情愿地离开家庭和社会环境搬到养老院。它们可以成为解决人口老龄化所带来的社会危机的方案的一部分。
然而,目前的智能家居解决方案存在局限性,因为传感器和驱动器在大多数情况下只能执行二进制操作,承担一些简单的任务。其次,这个传感器网络和执行机构被设置在固定位置,只能覆盖预定义的面积,这意味着有限的感知范围。移动机器人可以进入没有覆盖的生活区域。它允许动态地添加其他观点(更多的信息)提供给算法,使算法可以做出决策,为用户的日常生活提供帮助。换句话说,静态传感器/执行器节点(传统的家庭自动化设备)和移动节点(机器人)的数据组合提供了改进环境辅助生活服务的新功能。
同时,服务机器人也保证了残疾人和老年人生活更舒适,在日常生活中做辅助,提升他们的人际关系。与目前的智能手机、联网电视或平板电脑相比,仿人机器人将为用户提供更自然、直观的交互,而且由于机器人可以进行的多模态交互,即语音、触觉或视觉交互,也将提供更多更充足的交互体验。
虽然机器人可移动,但由于机器人的传感器和执行器都位于同一个位置,所以它们的动作和感知范围受到物理位置的限制。他们不能在其他房间里行动。例如,如果机器人在厨房做饭,它将无法检测到有人在客厅摔倒。因此,将机器人连接到传感器和执行器上的网络,可以解决每个系统的缺点,形成一个完整的解决方案,既可以无缝收集信息,在任何位置执行操作,承担复杂的任务,又可以以多模式和社交方式进行交互。我们认为,连接智能家居的机器人可以带来相关的解决方案,提升老年人生活的舒适感和安全性。
2、最先进的:智能的互操作性设备
物联网(IoT)和智能家居系统的出现,让我们能够将不同领域的设备结合起来,探索新的用途和服务。问题是,在能够提供智能服务之前,使用不同技术的设备之间的互操作性是一个需要克服的主要问题。
2.1家庭自动化的互操作性
家庭自动化系统的主要问题之一是通信协议的选择。在经典协议(Z-Wave、KNX、EnOcean等)中,一些协议得到了广泛的应用;但是,没有很好的考虑它们之间的互操作性。例如,有人想使用Z-Wave传感器和KNX执行器,如果没有专门的网关负责这两个协议之间的操作,这两个仪器就不可进行互相操作。
互操作性解决方案面临几个挑战。首先,传感器和执行器不具有物理层和使用中的传输通道(频率、吞吐量、带宽、数据编码等)的相同特征。另一方面,传感器和执行器着重于在实际应用中。最后,商业模式对现如今设置在房屋中的系统体系结构有很深的影响。消费者面对的是一个垄断的市场:很少有供应商能提供满足所有需求的解决方案,也很少有机会从其他供应商那里购买设备。这就是为什么公共建筑由使用相同专有协议的传感器/执行器网络和收集所有消息的网关组成。网关还具有管理界面,起到管理员的作用,提供与Internet的连接,通过移动应用程序开发访问。主要的挑战是设备之间的互联、互通信能力。事实上,对于家庭自动化系统来说缺乏标准化。在过去的10年里,出现了许多创新、协议或标准,如ZigBee、EnOcean或Z-Wave;然而,它们仍然没有提高与其他协议或标准之间的可操作性。现有的解决方案可以分为三类:通信协议、中间件和体系结构/框架。对于这三类,使用公共机制(或功能)来实现互操作性。实际上,大多数解决方案都具有类似的组件或功能,这些组件或功能对于包含异类设备的系统非常重要:节点寻址模式、参与节点的描述或语义、发现机制、通信协议、安全性和隐私性等。综上所述,几乎所有的解决方案都围绕着所谓的网关的概念:一个盒子(一台小型计算机)配备有两个或多个模块,每个模块都使用一个给定的家庭自动化协议;然后,这些模块上的一个软件使在协议A和协议B之间转发消息成为可能。此外,这些盒子嵌入了额外的功能,使所有这些都可用:HMI(通过Web和/或智能手机)、配置工具、到云中的额外服务的连接器等。提出对现有解决方案的审查。其中的一个最先进的解决方案可能是openHAB[2]:一个用Java实现的模块化可扩展开源网关。然而,这也是一个集中的解决方案。从互操作性的角度来看,这样的解决方案是不完整的,因为每个盒子管理有限数量的低级协议,盒子之间几乎不能相互通信。为了克服这些限制,已经提出了xAAL系统。基本上,我们的想法是重新组织和形式化这些盒子的架构,它们实际上都是由相同的功能组成的。xAAL系统依赖于a功能实体的分布式体系结构,通过IP上的消息彼此通信。
2.2机器人互操作性
过去的20年见证了许多面向服务机器人的机器人平台的发展。然而,很快就出现了对人们来说似乎微不足道的问题,但往往因为条件、环境或任务实例的多样性很难解决。处理这些变化是如此困难,没有任何一个实验室或机构能够独自做到这一点。因此,有了能够插入不同的功能/能力来增强机器人平台的潜力的需求。为了实现这一点,由几所欧洲大学组成的RobotCub财团决定共享同一个类人机器人平台[3]:iCub[4]。尽管如此,大多数机器人领域的实验室和大学仍在开发非常不同的平台。因此,每个实验室或机构在各自的机器人平台上开发的各种功能之间实现互操作性至关重要。
此外,还建立了一系列机器人软件开发的软件框架,以鼓励协作机器人软件开发。机器人操作系统(ROS)是一个编写机器人软件的框架。它是一系列工具、库和约定的集合,旨在简化在各种机器人平台上创建复杂和坚固耐用的机器人行为的任务。该中间件提供标准的操作系统服务,如硬件抽象化、低级设备控制、常用功能的实现、流程之间的消息传递和包管理。目前,ROS已经与数十个机器人和端口兼容,能够将不同的功能集成到一个机器人中,并能够在不同的机器人之间进行通信。
虽然在机器人技术和家庭自动化领域中已经做了不少努力使互操作性成为可能,但是很少有开放的解决方案能够同时支持这两个领域,使之可以进行互操作。物联网桥包[7]提供了ROS和openHAB之间的桥梁,允许ROS应用程序与给定的openHAB框进行交互。操作仅限于由给定框管理的家庭自动化设备。我们还可以引用SmartSEAL项目,该项目通过重复使用ROS基础设施作为技术基础[8],提出了一个家庭自动化系统。虽然作者没有在他们的系统中使用机器人,但SmartSEAL可能可以与ROS开发的机器人兼容。我们的解决方案略有不同,因为这将使机器人被视为家庭自动化设备之一。在描述了xAAL-ROS系统的体系结构之后,我们将在一个用例中说明我们的家庭自动化解决方案——机器人互操作性在实际中的应用。
3、机器人:基于xAAL的智能家居互操作性
3.1 xAAL:异构环境设备的分布式基础架构
为了克服家庭自动化领域的互操作性问题,提出了一种名为xAAL的传感器-执行器层[1,9]。
xAAL是一种功能分布式架构;所有组件都通过IP(多播)总线与其他组件通信。通信采用多对多的形式。消息是用Poly1305 Chacha20加密的JSON格式。传统上由家庭自动化机箱实现的集合功能被安排成定义良好的独立功能组件:特定于技术的设备的基本网关、本机xaal设备、缓存、配置数据库、用户界面、场景自动机等。每个组件可以有多个实例,可以由多个实例共享,并且可以物理定位于任何盒子上。图3描述了xAAL的总体架构。
设备有一种类型,由模式描述。模式为设备提供语义并描述其功能:该设备上可能的方法列表、自动发送的通知列表和属性列表。这些模式受到UPnP方法[10]的启发。
消息由IP多播总线(IPv4或IPv6)传输。正如UPnP所提出的,总线允许发现:当安装中出现一个新组件时,它会自己显示自己。然后,所有其他实体都可以将其考虑在内。类似地,当一个新组件进入时,它可以查询总线来发现已经存在的其他组件。这大大简化了配置,并允许其中出现动态变化。
3.2基于xAAL和ROS的系统架构
为了实现与大多数机器人的互操作,我们设计了一个基于xAAL和ROS的体系结构。各组成部分如图4a所示。它们包括使用xAAL的设备,如自动门、插头和电话。它们还包括一个与ROS兼容的服务机器人,该机器人具有语音识别和说话功能,以及一个摄像头等。我们还可以将我们的系统链接到其他编程接口,以便与智能家居之外的系统或人员进行通信。在我们的实现的系统中,我们使用了WebRTC是一种JavaScript编程接口,用于各种web浏览器的实时通信。WebRTC的目标是链接诸如视频流、IP语音、对等文件共享等应用程序。
如图4b所示,该系统的计算架构基于机器人或Kinect摄像头等其他组件的ROS节点连接的中央控制器,以及管理与家庭自动化设备通信的xAAL代理。中央控制器还连接到其他组件,例如通过电子邮件进行通信。因此,中央控制器既是ROS节点又是xAAL组件。对采集到的数据进行分析,保证了高水平的系统功能。
3.3要求与性质
由于我们的系统依赖于xAAL和ROS,所以必须符合两者的要求。xAAL使用C、Python和Java语言实现,在类Unix系统和Windows下都可以运行,而ROS面向类Unix系统,主要在c 、Python和Lisp语言环境中使用。因此,我们选择了ROS的一个节点的来实现我们的方案,使用Unix系统在Python中链接xAAL和ROS。
与以前依赖于集中系统的解决方案相反,由于xAAL的设计,所提出的解决方案允许进
入分布式系统的世界中,并从中得到好处。在网络安全方面,我们实施的系统还没有解决这个问题。虽然ROS没有身份验证系统或安全层,但是最近的一些扩展设备为机器人组件之间的网络通信提高了安全性。例如,实验性的SROS[11]增加了一组安全性增强设备,例如对本机所有的套接字的传输的TLS支持。同样,xAAL从v0.5版本开始就添加了一个安全层。未来的工作可能是解决其中的安全问题。
xAAL (http://recherche.telecom-bretagne.eu/xaal/)和ROS都是开源的,因此我们决定在https://github.com/yiqiaoc/ROS_Package上共享我们的实现。我们为辅助技术进行了一个完整的用例的实现,将在下一节中进行描述。
4、用例:在家里摔倒后提供帮助
我们希望在基于智能家居和移动机器人在家庭援助的场景中,说明一个综合系统的潜力。在这个例子中,我们试图解决每三个老年人中就有一个人受到跌倒的影响这样一个问题,因为这是导致老年人受伤死亡[12]和与受伤住院[13]相关的主要原因之一。因此,在老年人日常生活中,摔倒时提供帮助对他们的安全至关重要。
4.1辅助技术在跌倒用例中面临的挑战
然而,在这个问题上还有很多问题没有解决。首先,尽管做了很多努力[15-17],跌倒检测系统仍然不
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[444095],资料为PDF文档或Word文档,PDF文档可免费转换为Word

