通过高速可视化和时间分辨PIV研究流动模糊喷油器的近场喷雾特征
收到日期:2014年6月1日/修订日期:2015年4月20日/接受日期:2015年4月26日/网上发布时间:2015年5月8日
摘要
在流动模糊(FB)喷射器中,雾化空气在喷射器孔上游的间隙停滞并分叉。 一小部分空气渗入液体供应管线,形成湍流两相流。通过喷射器孔口的压降导致气泡膨胀并破裂,从而将周围的液体分解成细小的喷雾。 在以前的研究中,我们已经通过使用FB喷射器展示了替代液体燃料如生物柴油,直接植物油和甘油的清洁和稳定燃烧,而无需燃料预处理或燃烧室硬件修改。在这项研究中,采用高速可视化和时间分辨粒子图像测速(PIV)技术来研究喷射器近场中的FB喷雾,以描绘雾化的基本机制。当空气与液体的质量比为2.0时,使用水作为液体和空气作为雾化气体进行实验。 注射器出口处的流动可视化集中在视场上,物理尺寸为2.3 mmtimes;1.4 mm,空间分辨率为每像素7.16mu;m,曝光时间为1mu;s,图像采集速率为每秒100 k帧。图像序列说明了大部分细小液滴,这表明通过FB雾化的主要分解可能发生在喷射器本身内。 主要出现在喷射器周边的一些较大的液滴经历瑞利 - 泰勒不稳定性的二次破裂。时间分辨PIV用于量化喷油器近场的液滴动力学。 呈现瞬时,均值和均方根液滴速度的曲线图以显示二次分解过程。二次雾化产生精细和稳定的喷雾,在喷嘴出口的几个直径内完成。 FB喷油器的这些优越特性在实际系统中对实现不同燃料的清洁燃烧具有吸引力。
1.介绍
日益增长的能源需求,化石燃料资源的枯竭以及环境保护意识促使人们寻求可持续使用传统燃料和可再生燃料的新方法(Rottenkolber等2002; Dumouchel 2008; Tropea 2011; Sedarsky等2013; Kourmatzis和Masri 2014; Mirsepassi和Rankin 2014)。最近,液体燃料燃烧领域的研究集中在生物柴油和其他粘性燃料如植物油(VO)和甘油的利用以及有效的雾化这些燃料的方法上(Szybist et al.2007; Raghavan et al.2009 ; Bohn等2011; Wang等2011; Quispe等2013; Steinmetz等2013)。液体燃料细微而稳定的雾化与随后的清洁,高效和稳定的燃烧直接相关。精细喷雾由多个小燃料液滴组成,可快速蒸发并与氧化剂充分混合,促进清洁的预混合燃烧,最大限度减少碳烟,一氧化碳(CO)和氮氧化物(NOx)的排放(Lefebvre 1980; Jiang et al。 2012a,b; Simmons和Agrawal,2012; Jiang和Agrawal,2014a,b)。在传统的双流体雾化器如空气喷射(AB)雾化器中,高速燃料射流在雾化空气的周围流动产生的剪切层不稳定性下分解成细小液滴(Rayleigh 1883; Taylor 1950; Lefebvre 1980,1989,1992)双流体雾化器喷雾的细度受多种因素影响,如燃料的运动粘度和表面张力以及燃料与雾化空气的相互作用(Lefebvre 1992)。此外,雾化空气 - 液体质量比(ALR)是影响雾化过程的关键参数(Lefebvre 1992; Simmons and Agrawal 2010)。 AB雾化不能产生优良的喷雾和替代燃料的清洁火焰,如生物质衍生的油,其粘度可能比传统柴油燃料高10-20倍(Panchasara et al。2009a,b)。 例如,由AB喷油器雾化的直接VO燃烧产生的CO和NOx排放量大于2000 ppm,超过了气体分析仪的范围(Panchasara et al。2009a,b)。 使用AB喷射器清洁燃烧诸如VO的粘性燃料需要燃料预热以降低运动粘度和/或加热的燃烧空气供应以提供足够的热传递以快速液滴汽化(Bohn等人2011; Quispe等人2013; Steinmetz等人 al。2013)。已经研究了泡腾雾化以克服常规喷射器对于高粘度液体燃料应用的限制(Sovani等人2001; Linne等人2010; Shepard 2011)。在泡腾雾化器中,雾化气体通过混合室壁上的孔隙被加压到液体流中,以在进入喷射器主体之前形成两相流(Sovani et al.2001; Gadgil and Raghunandan 2011; Shepard 2011)。气泡在注射器出口附近膨胀,将周围的液相分解为细小的喷雾。然而,内部两相流动状态可能会在喷射器体内从气泡流过渡到具有大气泡的团状流或具有由环形液膜围绕的合并注入气体的环状流。段塞流状态可以产生由大的气体间隙随后液塞(Sarkar和Ramamurthi 2007; Shepard 2011)的间歇性流动产生的脉动喷雾。最近,林等人。 (2009,2011)设计了一种新型泡腾(或充气液体)喷射器。对于适度的曝气水平,它在混合室内产生均匀的两相流,而不是气泡或环形流(Lin et al.2009,2011)。在喷射器出口的下游添加具有不同配置的适配器以进一步修改两相流结构(Lin等2014)。使用X射线照相术在近场进行的测量表明,具有适配器的这种泡腾注射器产生高度分散的喷雾剂(Lin et al。2014)。
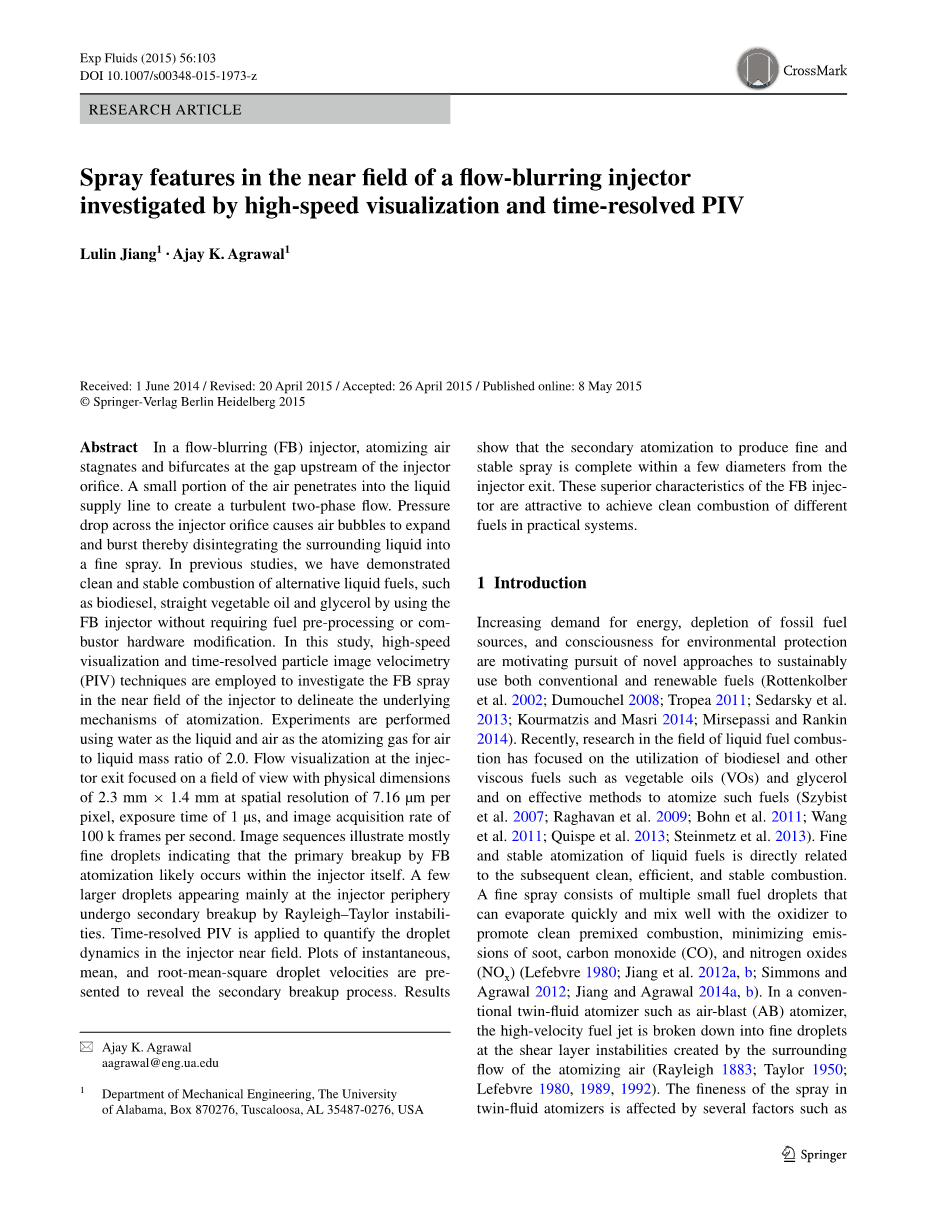
Gantilde;aacute;n-Calvo(2005)报道了一种称为流动模糊(FB)雾化的新概念。 FB雾化利用类似于泡腾雾化的两相流动概念,但不包括混合室内的内部混合过程。在FB雾化器中,两相流形成在液体供应管的末端。 FB雾化器的工作原理如图1a所示。正如Gantilde;aacute;n-Calvo(2005)所报道的那样,一部分雾化气流通过管尖与喷射孔之间的间隙进入液体供应管,形成两相流。对于液体供应管内径D等于喷射器孔口直径,如果液体管尖端和喷射器孔口之间的间隙H小于或等于或小于或等于喷射器孔口的直径,则气流分叉并且在液体管线中产生两相流动。等于0.25D。 Agrawal等人(2013)设计了一个透明注射器,用于观察由暖白色LED灯照亮的内部流动结构,并使用曝光时间为31mu;s,空间分辨率为20mu;m的高速摄像机(MotionPro HS-4)成像。内部流动可视化揭示了关键特征,包括雾化气体渗入液体供应管线,以及在液体供应管线末端形成湍流气泡生成区,如图1b所示(Agrawal等人,2013)。两相流体通过喷嘴孔流出,突然的压降导致气泡膨胀并爆裂。周围的液体因此在气泡爆裂过程中被破碎成细小液滴(Gantilde;aacute;n-Calvo 2005)。 FB喷射器产生稳定且精细的喷射,而不需要非常高压的雾化气体,如我们以前的研究中所证实的,没有和伴随燃烧(Panchasara等人2009a,b; Simmons等人2009; Simmons和Agrawal2010,2020; Simmons 2011 ; Jiang等2012a,b; Jiang)。
图1 一种流动模糊注射器的工作原理和FB注射器的内部可视化
图2直观地显示了在ALR = 3.5的情况下,对于相同的水流量和空气流量,由AB和FB喷射器形成的喷水具有明显的质量差异。这些图像表示喷射器出口紧邻下游7 mmtimes;7 mm的视场(FOV),以突出显示喷雾的主要特征。请注意,需要不同的曝光时间来获取这两种情况下的可观察图像; FB喷射器产生较小的液滴,这需要较长的曝光时间以产生足够的散射光用于视觉成像。图2显示AB注射器在近场产生典型的液体核心,而对于相同的液体和气体流量,FB注射器形成精细喷雾,说明后者的雾化能力显着提高。相位多普勒粒子分析仪(PDPA)的测量结果也表明,对于给定的液体和雾化空气流速,FB喷油器比AB喷油器产生更精细的喷雾(Simmons et al。2009; Simmons 2011)。用FB注射器喷洒水雾时液滴直径分布的径向分布图显示Sauter平均直径(SMD)为7-25mu;m,最大液滴直径为约30mu;m。然而,AB注射器产生的SMD在7-45微米范围内并且最大的水滴直径约为80微米。 在柴油的冷喷雾,粘性VO和反应甘油喷雾中定量PDPA测量显示FB喷射器为所有这些燃料产生细喷雾剂,其流动加权平均SMD为约30-40mu;m,分别在2- 在喷油器出口下游10 cm处(Simmons 2011)。
此外,我们的研究小组之前的燃烧研究表明,FB喷油器可以使常规燃油(如煤油和柴油)更清洁燃烧。 FB喷射器使煤油和柴油火焰中的CO和NOx排放量减少3-5倍(Panchasara等,2009a,b)。 在FB系统中,生物柴油,直接VO和甘油在同一个系统中,以超低排放的CO和NOx稳定且干净地燃烧,克服了目前AB雾化器的局限性(Simmons 2011; Jiang et al。2012a,b ; Simmons和Agrawal 2012; Jiang和Agrawal 2014a,b)。
在之前的研究中,通过PDPA技术在喷射器出口下游至少1.0cm处获得喷雾中的液滴直径和速度的测量结果。在这些研究中提出的液滴直径分布表明,FB喷射器对于包括水,柴油,VO和甘油在内的各种粘度的液体具有出色的雾化能力(Simmons等,2009; Simmons和Agrawal,2010; Simmons,2011)。然而,迄今为止在喷射器近场未获得测量结果,这对于理解液体破裂过程(例如气泡破裂)的细节以及最终将喷射特性与FB喷射器几何形状和操作条件相关联是重要的。在AB注射器中,由于存在主要的液体核心,所以近场测量难以通过PDPA和其他定量技术获得(参见图2a)。然而,来自FB喷射器(例如图2b)的细喷雾提供了使用先进的流动诊断技术来了解近场中的液体分解过程的机会。因此,本研究旨在使用高速成像和时间分辨粒子图像测速(PIV)来表征FB注射器的近场。主要目标是深入了解FB喷雾特征,包括液滴动力学和液滴分裂过程。 PIV用于测量液滴速度,而不是气相速度,预计这个速度会更高。
图2 对于空间分辨率为20mu;m,曝光时间为1ms的AB注射器,水喷雾液体流速为8ml / min,ALR = 3.5,b为空间分辨率为33mu;m,曝光时间为10ms的FB喷射器
2.实验装置
2.1流动模糊注射系统设置
在图3中显示了在环境条件下产生喷雾的内部制造的FB喷射器设置的示意图。液体供应管的内径D以及喷射器孔的内径D为1.5mm。液体供应管尖端与喷射器孔口之间的间隙H = 0.375mm用于满足FB雾化的要求。选择作为工作液体的水由Cole Parmer高性能蠕动计量泵(型号7523-40)泵出,精度为读数的plusmn;0.25%。使用四辊泵头(Masterflex L / S Easy-Load II头),脉动阻尼器和长软排放管来消除脉动,确保水流稳定供应。水在流入与支架连接的注射器之前从侧面进入注射器支架。雾化空气(AA)由注射器支架的上游以由奥尔堡质量流量计(型号CFM47)测量的预设流量供应,其精确度为读数的plusmn;1.5%。使用20标准升每分钟(slpm)的空气流量和12ml / min的水流量来获得ALR = 2。
2.2高速可视化设置
使用安装有100mm焦距透镜,2倍延伸器和130mm延伸管长度的高速相机(Photron FASTCAM SA5)来获取尺寸为2.3mmtimes;1.4mm的小FOV的视觉图像,喷油器出口。对于100,000 fps的采集速率,图像呈现每像素7.16mu;m的空间分辨率,以区分单个但固定的液滴;本研究中列出的所有空间分辨率均指实际(可测量)的空间分辨率。背景照明由激光驱动等离子体产生的非常高强度的白光源(Energetiq LDLS)提供,以最小化在1mu;s的照相机曝光时间期间由液滴运动引起的模糊;在照相机曝光时间内,仍然有100米/秒速度的液滴会移动大约100微米。因此,在实践中,只有慢速移动的较大液滴才能被准确检测到。请注意,使用校准目标将相机聚焦在喷雾的中心平面上,试图区分中心处的液滴和远离中心的液滴。
2.3粒子图像测速(PIV)设置
时间分辨PIV技术用于测量喷油器近场的液滴速度。 如图3的示意图所示,使用双头Nd:YAG激光器(Quantronix Hawk-Duo 532-12-M激光器,波长为532nm,平均功率为120W)产生两个激光脉冲 时间间隔为1mu;s,重复频率为15 kHz。 使用具有-15mm焦距柱面透镜和1000mm球面透镜的TSI发散片光学器件来形成1mm厚的激光片以照亮FOV。 具有微观透镜组的高速相机(Photron FASTCAM SA5)垂直聚焦在激光片上,总观看面积为8.6mmtimes;8.6mm,产生每像素16.83mu;m的空间分辨率。 摄像机与激光脉冲的时间设置同步,以1mu;s的间隔和15 kHz的图像对采集率采集图像对。
使用具有交叉相关的图像对子区域的Insight软件(版本4.0 TSI Inc)分析帧跨坐标图像以生成近场FB喷雾的速度矢量。使用具有50%重叠间隔的64times;64像素的初始询问窗口尺寸来计算速度矢量。这种小窗口尺寸可以最小化粒子相关噪声,并且仍然包含十多个有效粒子对,确保几乎100%有效的速度测量(Keane and Adrian 1992)。对于目前的设置,平面外位移与光板厚度(1.0mm)的比值约为0.005,远小于分析软件所要求的最大可接受水平0.25。因此,平面外运动对速度测量的精度影响可以忽略不计。使用三种方法消除杂散矢量。首先,应用局部中值测试来滤除向量。当当前速度矢量与相邻矢量的局部中值速度之间的差值超过给定容差(两倍的局部中值)时,该矢量被拒绝并被有效的二级峰替换。其次,当信噪比大于1.4时矢量是有效的。应用范围过滤器来排除超过轴向(V)和径向(U)位移合理限制的矢量。矢量字段中的空洞使用采用局部均值的递归填充过程填充。它首先用最有效的邻居填充空洞,然后填充第二个最有效的邻居矢量。
图3 注射系统和PIV实验装置的示意图,b图为FB在注射器中的流动路径
3. 结果与讨论
3.1喷雾可视化
3.1.1通过FB原子化初步分解<!--
全文共10959字,剩余内容已隐藏,支付完成后下载完整资料
英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[12907],资料为PDF文档或Word文档,PDF文档可免费转换为Word

