
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
利用新型元胞自动机对行人流量的形成进行了研究模型
陶亦舟,董力耘
上海应用数学与力学研究所,上海大学,上海200072,电子邮件:yizhoutao@163.com
[1]简历:陶毅周(1982-),男,博士 通讯作者:李立云,电子邮件:dongly@yeah.net
文摘: 在本文中,我们通过使用基于楼层场模型的新提出的元胞自动机(CA)模型来调查人流。 行人之间的相互作用包括完成和合作,分别通过改变的动态场和位置变化行为来反映。 然后,我们利用该模型研究逆流问题中的车道形成阶段,涉及车道形成阶段的概率,车道的平均数量和行人的微观行为。 发现行人之间的相互作用以及行人流密度对道路形成特征的不同影响。
关键词:元胞自动机(CA),地板模型,行人流量,车道形成。
0. 介绍
近年来,人流研究由于其在社会问题上的重要性而备受关注。 该研究为现有的步行设施提供疏散策略,并为设施设计提供参考。 不幸的是,最近在人流拥挤情况下发生的灾害已经增加。 例如,上海外滩发生的踩踏事件,导致2014年12月31日除夕夜大量人员伤亡。这类事故证明了行人流研究的重要性。
数值模拟是研究行人流的一种有效方法。 目前在这个领域的建模方法包括社会力模型[1],连续模型[2]和元胞自动机(CA)模型等。在CA模型中,一个完整的离散模型,空间被分成单元,其中 行人被认为是粒子。 他们可以在一个时间步中移动一个或多个单元格,并且程序可以并行或依次更新。 此外,CA模型可以分为有偏序随机游走模型[3,4],场地模型[5-8],局部模型[9,10],实数编码元胞自动机(RCA)模型[11], 多网格模型[12]和基于力的模型[13,14]等。在地板场模型中,已经提出了两种称为动态和静态的介质来描述行人和它们之间的远距离相互作用 邻居在路径寻找。
逆流问题是行人流研究中最重要的问题之一[15,16]。 由于两组行人相反地分别在两个方向上分别在行人中形成车道,这是典型的自组织现象之一。 很多作品集中在车道形成标准[6]和干扰 - 过渡[17,18],但车道的特征,如车道的宽度和数量,行人之间的冲突和车道形成条件 隔离在以前的研究中很少提及
在本文中,我们提出了一个新的CA模型,称为基于floor-field模型的交互CA模型。 被修改的动态场所描述的不同行人之间的冲突。 另外,两名行人未能按照既定先决条件改变立场。 该设置可降低异常情况发生的概率。 然后,通过在模拟中使用这个模型,我们调查车道的特征。
1.模型定义
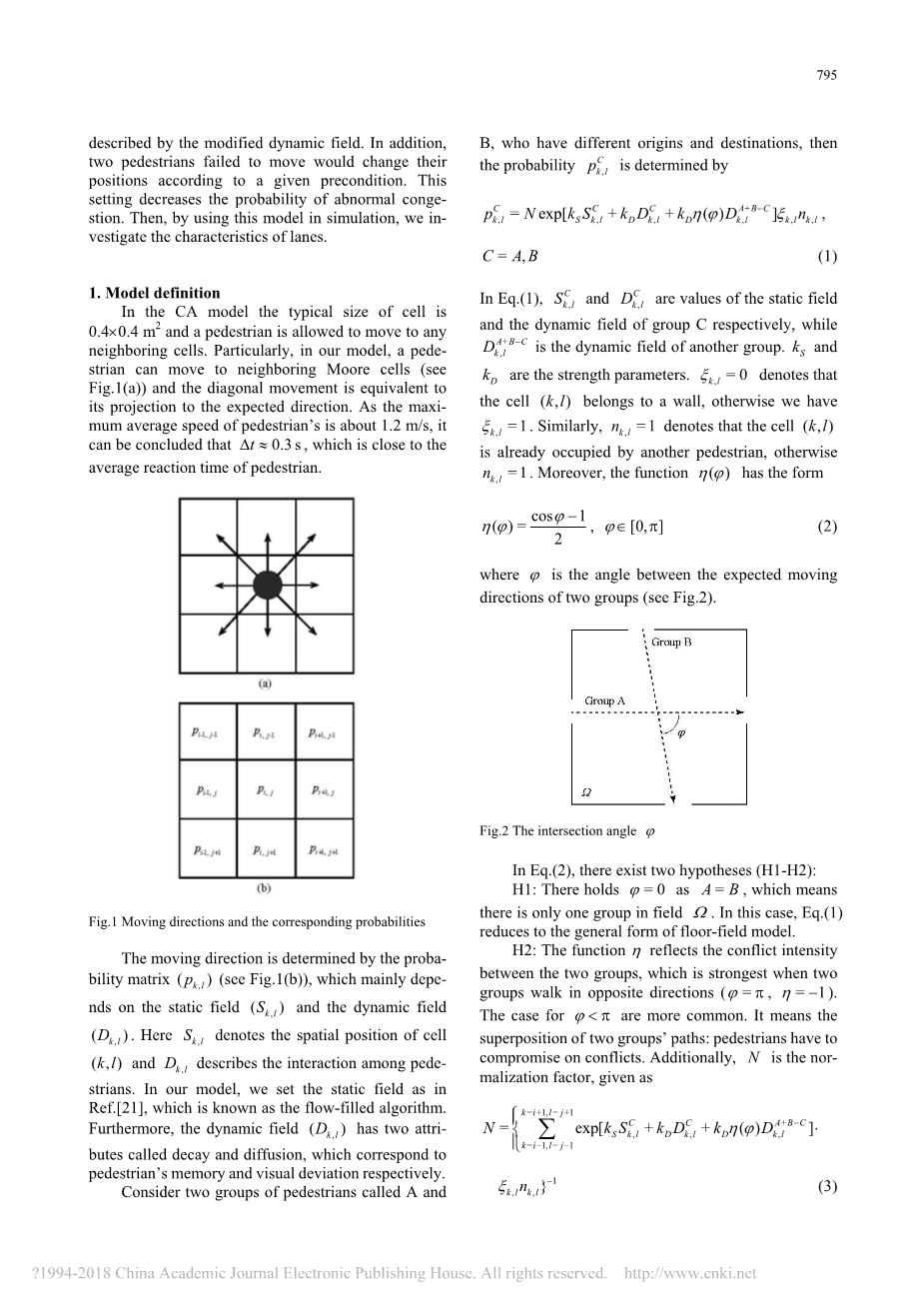
在CA模型中,单元格的典型大小为0.4times;0.4平方米,允许行人移动到任何相邻的单元格。 特别是在我们的模型中,一个台风可以移动到相邻的摩尔单元(见图1(a)),对角线运动等同于它向预期方向的投影。 由于行人的最大平均速度约为1.2 m / s,因此可以得出结论:0.3秒接近行人的平均反应时间。
|
Pi-1.j-1 |
Pi.j-1 |
Pi 1,j-1 |
|
Pi-1,j |
Pi,j |
Pi 1,j |
|
Pi-1,j 1 |
Pi,j 1 |
Pi 1,j 1 |
(b)
图1运动方向及相应概率
移动方向取决于概率矩阵(pk l,)(见图1(b)),主要取决于静态场(Sk l)和动态场(Dk l)。 这里Sk l表示细胞的空间位置(k l,)和Dk l描述了高级人员之间的相互作用。 在我们的模型中,我们设置参考文献[21]中的静态域,这被称为流动填充算法。 此外,动态场(Dk l)有两个称为衰减和扩散的属性。
Sck,l和Dck,l分别为是静态字段C组的动态场的值,考虑两组称为A和B的行人和C组的动态场,而Dk lA B C, - 是另一组的动态场。 kS和kD是强度参数。 = k表示单元(,)k l属于一个墙,否则我们有k 1,l = 1。 类似地,nk l,= 1表示单元(k l,)已经被另一行人占用,否则nk l,= 1。 此外,函数具有这样的形式,其中是两组预期运动方向之间的角度(见图2)。
交叉角phi;
在等式(2)中,存在两个假设(H1-H2):
H1:保持= 0为A = B,这意味着字段is中只有一个组。 在这种情况下,方程(1)简化为平场模型的一般形式。
H2:函数反映了两组之间的冲突强度,当两组在相反方向行走时最强(=,=1)。 case的情况更为常见。 它意味着两个小组路径的叠加:行人必须在冲突上妥协。 此外,N是规范化因子,如给出,交互模型的计算过程组织如下:
用Eqs(1)-(3)给出了计算程序。
交互模型组织如下:
步骤1:在T = 0时,设置初始边界条件和静态场(Sk lC,)。 另外,让初始动态字段(Dk lC,)无处不在。
步骤2:动态场Dk lC,衰减每个细胞(k l,),则令Dk lC,DklC,exp()其中参数代表衰减速度。
步骤3:Di jC随机扩散到一个相邻小区(,)k l,如式(1)所示:Sk iC,Si jC,Dk lC,Dk lC, exp()Di jC步骤3:Dci,j随机扩散到一个相邻的区域细胞(k,l)
Dk lC, Dk lC, exp()Di jC,
假定行人通过追踪留下的信息追踪他人。
步骤4:行人移动到一个相邻小区(k l,)根据概率(pk lC,)。 如果Sk 1C,Si Si(即小区(,kl)比小区i,ij更远,则仅考虑静态字段Sk lC,否则概率pk lC由等式(1)。这种各向异性的设置使得行人不会被他们自己的信息所吸引。 如果有一个以上的行人想要进入同一个小区,那么其中一个行人会被选中移动,而其他人则保持不动。
pk lC, = N exp(k SS k lC, )k l, nk l,
步骤5:如果两个相邻的行人a(A)和b(B)未能移动,则我们假定他们位置不同(见图3)。 行人有主动权,前提是两个领域的总和在哪里。 总和重新呈现了描述行人空间适应性的行人位置变化的增益。 此外,它减少了异常拥塞的可能性。fi j,A fk lA, , fk lB, fi j,B
步骤6:如果组C的行人经过小区(,)k l,则动态场Dk lC加1:Dk lC,Dk lC, t和t = tt。 如果tT,程序转到步骤2,否则程序退出。
图4四个典型阶段
2.车道形成的可能性
考虑一个模拟域,它是一个40times;12平方米的走廊。 起初,里没有行人。 然后A组的行人从左至右步入,另一组B从右侧向相反的方向行走。 一旦平均密度达到阈值密度0,就会使用周期性边界条件。 为了使平均速度v接近最大平均速度1.2 m / s,当出现少量单向行人时,静态场强kS固定为3.0。 同样,为了避免行人的不合逻辑行为,参数(,)设为(0.4,0.8)。
图4显示了在密度= 2.5 peds / m2的模拟中发现的四个典型阶段。 自由运动阶段(图4(a))通常在kD = 0时出现。除了防撞规定外,行人之间没有相互作用,行人的行动不受限制。 所以在日常生活中很少见。
拥挤阶段(图4(b))通常发生在kD = 4时。 随着动态场强的增加,拥堵阶段更可能出现。 拥堵的原因是同一组中的小行星挤压排队,导致车道隔离困难。当kD = 2.5时,经常出现亚速车道形成阶段(图4(c))。 尽管有车道可供选择,在当地发生交通拥堵并存在该领域。 最后,该阶段将转变为另一个稳定阶段,例如,当通量较高时的拥塞阶段。当kD = 1.0时,车道形成阶段(图4(d))出现。 为了最大限度地减少不同群体之间的冲突,人群被分成几个队列。 巷道的形成是一个典型的自组织现象,它始终存在于多粒子系统中,系统的效率将得到提高,在队列的边界发生冲突,可以用步骤5中的位置变化行为来衡量。
图5
图5显示了车道形成的概率分布。 横轴表示平均密度,纵轴表示动态磁场kD的强度。 每个点样本(,kD)计算20次,程序运行5000次时间步骤。 N c是新设计的变量,用于反映冲突强度,其中Nc是每个位置变化的数量
时间步骤。 作为N行人和TN时间步长的平均值,方程(9)的第一项描述了在车道形成阶段弱的冲突是保证N c0的参数,在我们的模拟中有= 12。 我们根据以下标准之一(C1-C2)确定结果中车道形成的特征:
C1:不同组别间存在明显的隔离,长时间模拟后车道图案稳定。
C2:由于我们发现N c7是车道形成阶段的概率等于1或小于1的区域之间的临界点,并且当持有N c considered时将结果视为车道形成。
在图5中的低密度区域([1.87,2.08] peds / m2)中,车道形成概率P为1.由于space的占用空间较小,因此不同组的两个队列是无干扰的, 一旦形成,车道形成阶段是稳定的。 然而,在高密度区域([2.08,3.12] peds / m2),对于任何给定的the,概率P随着kD的增加而减小。 由于空间有限,更强的相互作用总是意味着更难分离的车道,特别是当两个小组第一次相遇并且他们必须相互楔入时。
另一方面,对于任何给定的kD,当ε增加时概率P不增加。 原因在于增加占用空间总是导致遇到的可能性增加,这对车道形成也是不利的。
3.车道数量
车道数量是车道形成阶段的重要指标。 正如已经知道的那样,宏观模型中的相对速度,相对速度,相互作用的强度,空间占有率和数值粘性对其有影响。两组相遇时车道减少。 N il()是在车道形成阶段的车道数目。 通过平均N il()S sam-ples,我们得到N1,车道形成阶段的平均车道数。
表格1 Ni和Ks
全文共10533字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[9580],资料为PDF文档或Word文档,PDF文档可免费转换为Word
|
1.25 |
1.45 |
1.67 |
1.87 |
2.08 |
2.29 |
2.50 |
2.71 |
2.92 |
3.12 |
|
|
0.5 |
3.65 |
3.75 |
3.65 |
3.6 |
3.55 |
3.65 |
3.35 |
3.55 |
3.25 |
3.08 |
|
1.0 |
3.8 |
3.75 |
3.55 |
3.7 |
3.70 |
3.65 |
3.62 |
3.20 |
3.10 |
3.00 |

