英语原文共 46 页,剩余内容已隐藏,支付完成后下载完整资料
.振动系统的建模
2.1 简介
2.2 惯性因素
2.3 刚度因素
2.3.1 刚度因素简介
2.3.2 线性弹簧
2.3.3 非线性弹簧
2.3.4 其他形式势能因素
2.4摩擦因素
2.4.1 粘性阻尼
2.4.2 其他形式的耗散
2.5 构建微机电系统模型
2.5.1建模简介
2.5.2微机电系统
2.5.3 背景设计
2.5.4 ski编辑器
2.5.5 切削实验
2.6 振动的设计
2.7 总结和验证
2.1简介
在这一章中,元素组成振动系统模型描述和使用这些元素来构造模型与实例说明。一般来说,有三个元素组成一个振动系统:惯性元素,刚度元素,摩擦元素。除了这些元素之外,还必须考虑外部应用力和时刻和外部干扰从规定的初始位移和初始速度。
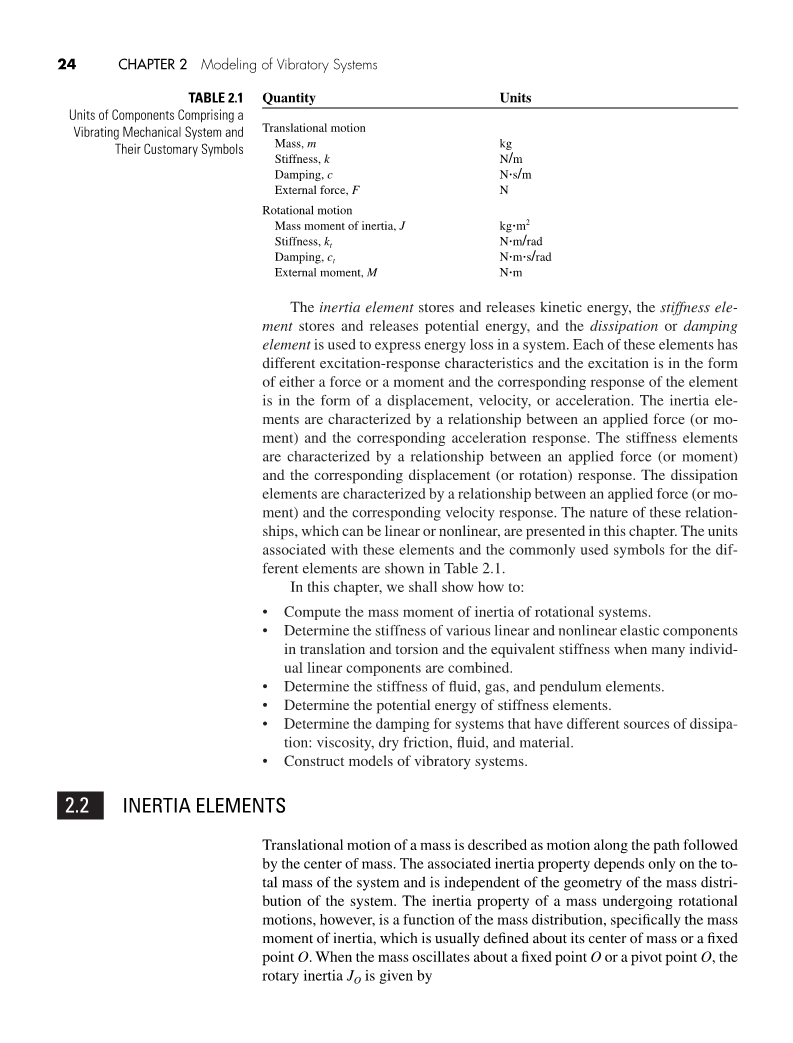
直线运动
质量 m kg
刚度 k N/m
摩擦 c Ns/m
外部力 F N
回转运动
转动惯性距 J kgm2
扭转刚度 k Nm/rad
扭转摩擦 c Nm s/rad
扭矩 M N m
惯性元件影响动能的存储和释放,刚度影响势能的存储和释放,和耗散或阻尼比较用来表达系统中的能量损失。每一个元素都有不同的励磁响应特征,激发力或力矩的形式和相应的响应元素的形式的位移,速度,加速度。惯性元素的特征之间的关系应用力(或力矩)和相应的加速度响应。刚度元素具有一个作用力之间的关系(或力矩)和相应的位移(或旋转)的反应。耗散元素具有一个作用力之间的关系(或力矩)和相应的速度响应。这些关系的性质,可以是线性或非线性,提出了在这一章。与这些元素相关的单位和不同元素的常用符号如表2.1所示。
在本章中,我们将展示如何:
bull;计算旋转系统的质量惯性矩。
bull;确定各种线性和非线性弹性元件的刚度在翻译和扭转和等效刚度,许多个人线性组件相结合。
bull;确定流体的刚度、气体和摆元素。
bull;确定刚度元素的势能。
bull;确定系统的阻尼耗散的不同来源:粘度、干摩擦,液体,和材料。
bull;构造模型的振动系统。
2.2 惯性因素
惯性因素平移运动的质量被描述为质心运动沿着直线运动。相关的惯性势能只取决于系统的总质量和独立于系统的质量分布的几何形状。质量的惯性特性进行旋转运动,然而,是一个函数的质量分布,特别是质量惯性矩,通常定义为质点。当一个物体围绕一个点或者轴心振动转动惯量Jo是可以通过质量来得出。JG是质点中心的惯性质量,d是重心到O的距离。如图(2-1)惯性质量JG和JO都定义对轴正常的质量。这质量惯性矩之间的关系通过质心轴G和O遵循平行轴通过另一个点的平行轴定理。
惯性质量的时刻在表2.2中给出了一些常见的形状。惯性的问题相关属性是力量和时刻,这些属性如何影响系统的动能是下一步检查。在图(2.1)中,翻译质量和速度的大小X-Y plane显示。速度矢量的方向也在图中所示,随着力的方向作用于这个质量。在在第1章线性动量和角动量有关理论已经给出,某些惯性特性和力量和时间之间的关系。这些关系在这里重新定义。基于线性动量的原则如图(1.11)给出的例子。
质量的运动方程
当i和m与时间无关时,简化为
如图(2.2)很明显,直线运动,惯性大小取决于加速的变化速度。在(2.1)里面得到的惯性大小很明显也可以从(2.2)得出。那么动能就可以用(2.3)和恒等式j*i=1求出
从图(2.3)可以清楚的知道物体的惯性和质量成正比的。此外,动能大小正比于速度的2次方,公式(2.3)是在不同于1.2.4的功能定理条件下得出的。我们假设初始速度为0在to 时刻得出初始形态公式,当时间为t f 时,得出正如图(1.26)的公式。
运用 d x= x d t得出公式(2.3)
仅供一个刚体进行旋转角速度在平面上,可以显示从角动量1.2.3节中讨论的原则。
M是以质量块G或者质点O的中心做转动如图(2.2),统一的磁盘铰链点在其周边和(b)质量一端铰接。
如图(2.6),它遵循旋转运动,惯性特性J是目前的角加速度的比值。再次,可以验证J表2.1所示的单位是一致的(2.6)。这种惯性财产也称为转动惯量。此外,确定J惯性属性如何影响动能,。(1.25)表明,系统的动能是因此,旋转运动的动能仅正比于早期isl的惯性特性J,质量惯性矩。此外,动能成正比的第二权力角速度大小。振动系统的惯性特性的讨论提供了到目前为止,惯性属性被认为是独立的位移运动。这种假设对所有物理系统是无效的。滑块机制讨论在例2.2中,惯性属性是一个函数的角位移。其他的例子也还可以在文献中找到的。
例题2.1 确定质量的转动惯量。我们将说明质量刚体转动惯量的不同分布是确定的。
同一圆盘条件下:例如(2.2a)里面的圆盘,如果JG 是圆盘的中心,那么就得到如下的公式
那么距离G点距离d的O点的转动惯量就是
相同的长方形铰链结构条件下:如图(2.2b)所示长度为L的铰链。铰链顶端
的质量均匀沿其长度分布。然后将杆的重心位于L / 2。然后就得到如下公式。
利用平行轴定理后,关于点O的惯性为:
例2.2滑块机构:系统具有不同属性的惯性。
在图2.3,显示与O点枢轴一个滑块机构。沿着质量毫升均匀杆质量MS幻灯片的滑块。另一间酒吧,这是在点O旋转有一个拥有量MB,并且拥有海量我长度e的另一部分长度B的一部分。我们应确定该系统的转动惯量JO并显示其对角位移的依赖性协调瓦特是从大量的条的中点的距离我是从质量MB的条的中点至0的距离,然后从几何我们音响次该因此,该系统的所有运动可以在坐标W上的角度来描述的。该系统的转动惯量JO是在给定的公式时到达。平行轴定理一直在确定JMB,JME和J m方程杆被使用。(b)和(c)中,很显然,本系统的转动惯量JO是角位移的函数换货。
2.3刚度因素
2.3.1 简介
刚性元件由不同的材料制成的,他们有许多不同的形状。一个人选择取决于要求元素的类型;例如,为了最小化从机械振动传递到支撑结构,以隔离由地震的建筑物,或从经受影响系统吸收能量。可商购的一些有代表性的类型刚性元件与它们的典型应用沿如图2.4所示。
刚度元件储存和释放的系统的潜在能量。要检查势能如何被定义,让我们考虑如图2.5所示的例子,其中一个弹簧在年底O上固定的,而在另一端,幅度为f的力沿着单位矢量的方向指向学家根据该力的作用下,让该元件从初始或未拉伸长度罗伸展到一个长度螺?沿着j的方向x。在发生这种变形,F d x c之间的关系是线性的或非线性的如随后讨论的。
(a)建筑物或公路基础隔震使用圆柱形的橡胶支座横向运动; (b)钢丝绳隔离孤立机械的垂直运动; (c)在悬浮系统中使用的分离的垂直运动的空气弹簧; (d)为垂直运动的隔离典型钢螺旋弹簧; (e)在烟囱调谐质量阻尼器用钢线弹簧来抑制横向运动。
来源:霍姆斯咨询集团;钢丝绳目录,2006; 2006年http://www.enidine.com/Airsprings.html ENIDINE股份有限公司; C系列振动隔离http://www.isolationtech.com/sercw.htm的数字;调谐质量阻尼器h t t p://www.iesysinc.com/ Tuned_Mass_Dampers.php2001-2002工业环境Sysytems公司的图。
如果F s的表示刚性元件内采取行动,如示于图包2.5b的自由体图,然后在较低的弹簧部分这个力是相等且相反的外力F内力;也就是:
由于力F s尝试刚度元件恢复到其未变形的状态的能力,它被称为一个恢复力。刚性元件变形时,能量存储在该元件中,并作为刚性元件是未变形,能量被释放。势能V是德网络d2为已完成采取从变形位置的未变形位置硬度元件的工作;即,工作需要元件到其原始形状。对于图2.5所示的元件,这是通过在这里,我们使用了i*j=1定J 的FJ。像的动能T,则势能V是一个标量值函数。
如在2.3.2节讨论了由一个弹簧所经历的变形和外部施加的力之间的关系可以是线性的。
2.3.3节中讨论的等效弹簧元件的概念中还在2.3.2节引入的。
2.3.2线性弹簧
如果如图2.6A的力被施加到线性弹簧,这个力产生一个挠度x满足
其中系数 k称为弹簧常数和有力和位移之间的线性关系。基于方程(2.8)和(2.9),存储在弹簧中的势能V由给定,得到如下公式:
因此,对于一个线性弹簧,相关的势能第二功率是线性比例的弹簧刚度K和位移的大小成比例。
扭曲弹簧如果一个线性扭转弹簧被认为是,如果一个时刻t被在一端施加到弹簧,而弹簧的另一端被保持固定的,t是弹簧常数,u是弹簧的变形。存储在该弹簧的势能为:
线性弹簧的组合
现在线性弹簧元件的不同组合被认为是与被确定这些组合的等效刚度。首先,在图2.6b和2.6C显示弹簧的组合被认为与以下相同,在图2.7A和2.7B所示扭力弹簧的组合考虑。
当有两个并联的弹簧,如图2.6b和其上的力的事实保持平行到原来的位置的条,然后两个弹簧的位移是相等的,因此,总的力是:
其中,F(x)是在弹簧KJ,J的合力 1,2,和是用于并行两个弹簧所给予的等效弹簧常数。
当有两个弹簧串联,如图2.6C所示,每个弹簧的力是相同的,总的位移是:
其中等效弹簧常数k是:
两个扭转弹簧:(a)并联组合和(b)串联组合。在一般情况下,对于N个并联弹簧,我们有:
并为N系列弹簧,我们有
对于图2.6b所示的弹簧组合的势能由下式给出
其中V1(x)是与刚性k1和V2(X)的弹簧相关联的势能与刚度k2的弹簧相关联的势能。利用方程(2.10)以确定V 1(x)和V 2(x)中,我们得到如下:
对于图2.6C所示的弹簧结合,该系统的势能由下式给出
公式 之前用过的(2.10)再次被使用。从系统的势能构造表达式是用于确定系统的运动方程是有用的,如在第3.6和7.2进行讨论。
对于串联和并联组合两个扭转弹簧,我们指的是图2.7。从图2.7A,每个弹簧的旋转u是相同的,因此
其中,TJ是在,j =1,2下产生的 1,2和KT是由下式给出的等效扭转刚度
对为串联扭簧,如图2.7B所示,每个弹簧的扭矩是相同的,但在旋转是不相等的。 从而
当K e 为如下时:
对于图2.7A中所示的扭转弹簧组合的势能由下式给出:
其中,我们使用公式(2.12)。对于图2.7B中所示的扭转弹簧组合,系统势能由下式给出
在使用振动模式共同结构元素的等效弹簧常数。
要确定弹簧常数为众多弹性结构元素一方面可以借助力和位移之间的已知关系的。已被确定为不同的几何形状和负载条件几个这样的弹簧常数在表2.3给出。出于建模的目的,所述结构元件的,如表2.3例4至6中的光束的惯性通常被忽略。在第9章,它是根据它的合理性什么条件下显示出做这样的假设。
因为它可能不总是可能通过分析得到的弹簧常数为一个给定的系统中,往往一个人通过实验来确定该常数。作为一个代表性的例子,让我们回到图2.4A,并考虑该系统的弹簧常数的实验测定。所述F s逐渐升高至选定的值,将所得挠度x元件的未拉伸的位置被记录为这些数据在图2.8,其中空心方块用来表示实验获得的数据的值被绘制F的每个值。然后,假设该刚性元件是线性的,曲线拟合做是为了估算式中的未知参数k。 (2.9)。所得的弹簧常数的值也示于图2.8。请注意,刚度常数k是一个静态的概念,因此,静态加载网络,以确定此参数。
力-位移关系比其他式(2.9)也可被用来确定参数如K表征一个刚性元件。在更广的范围内,程序用来确定参数,如区域称为系统鉴定音响阳离子或下一个振动系统元件落下的k个数参数鉴定科幻阳离子;鉴定科幻阳离子和振动系统在实验模态analysis.4在实验模态分析的场均讨论了参数估计,动态加载用于参数estimation.A进一步讨论在第五章,规定当系统输入 - 输出关系(传递函数和频率响应函数)被考虑。
接着,一些实施例被认为是说
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146950],资料为PDF文档或Word文档,PDF文档可免费转换为Word

