英语原文共 11 页
海洋工程121(2016)268-278
ECDIS框架下的多目标避碰路径规划
邹明成
高雄市海军大学航空技术系,高雄市区中区三路482号,高雄市80543,台湾
关键词:AIS GIS 避碰路径规划
摘要:船舶自动识别系统(AIS)以及电子海图显示和信息系统(ECDIS)装置的普遍性将为信息化,智能化和集成化的电子导航时代提供革命性的解决方案。基于这一概念,本研究采用电子海图显示和信息系统(ECDIS)作为航行决策支持的信息平台,并利用AIS(船舶自动识别系统)收到的实时导航信息构建目标船舶的预测危险区域(PAD)。在避免碰撞过程中PAD的直接观察的优点赋予了PAD一个新的应用。其后,来自电子导航图(ENC)的空间数据被用作生成地理障碍的信源。通过地理信息系统(GIS)模块的集成,专门设计的进化后的算法,船舶避碰规则(COLREGS)知识以及综合考虑船舶整体航行情况,该系统会进行避碰决策和路径选择。本系统可以同时实现避免多船遭遇碰撞和避免地理碰撞的路线规划。预计这将给在海上工作的海员们提供非常大的便利,减少他们的工作量。该系统还能够为海员们做避碰决策提供参考。
1.简介
随着自动识别系统(AIS)在船舶避碰技术中的应用,获得避碰决策支持所需信息的问题得到了很好的解决。自动识别系统(AIS)可以提供与船舶有关的静态信息和高度精确的动态信息,从而提供大量的信息和实时数据。
AIS提供的数据是促进做出避免碰撞决策的重要信息来源。因此,如果这个自动决策支持系统可以与AIS提供的准确和实时的导航信息相结合,它将能够根据预测的危险区域改进以前的自动雷达绘图辅助系统(ARPA)的不足之处。PAD具有能够直观,快速且准确地确定碰撞危险的优点,以及直接
提供转弯幅度的方式。但是,在过去,由于对ARPA本身特性的限制,这些优点无法体现。现在,随着AIS设备的全面安装,我们能够解决这些问题。
电子海图显示与信息系统(ECDIS)是继GPS、GPS之后的又一项革命性的现代导航新技术。它连接AIS,雷达,GPS和其他导航仪器等,并进行各种导航形式的实时信息的综合处理和显示。因此,它对确保航行安全和提高导航运行效率具有非常重要的影响。它可以说是导航系统的信息中心,这也是构建船舶避碰决策支持系统的重要平台。规划最佳避碰路线不仅包括最为重要的航行安全的方面,还包括经济因素和其他许多方面。由于这是一个多标准的非线性规划问题,我们需要一种优化的处理方法,该方法应具有更高的灵活性和更高的效率。进化计算技术具有处理这类问题的巨大潜力。
因此,通过将AIS提供的精确的信息,PAD提供的直观防撞信息,地理信息系统(GIS)对电子导航图(ENC)中障碍物空间数据的处理能力,进化计算对于路径规划问题的灵活性,防撞规则(COLREGS)知识的规范,以及用于处理,分析和整合数据的ECDIS平台相结合,本研究试图通过监测整体水上航行情况进行综合评估,自动规划可以同时避免多船遭遇碰撞和避免固定障碍碰撞的最佳路线。这一研究旨在为在海上工作的人员提供更大的便利,减少他们的工作量。同时,该系统也可以为船舶避碰决策的制定提供参考。具有很高的参考价值。
2.前期工作
关于避碰/避障路线研究的课题,已经有相当多的论文对此进行讨论和研究了(例如Tam于2019年发表了与此相关的论文),开发了一套基于知识的专家系统,Iijima和 Hagiwara 于1991年提出了一系列基于专家系统相关知识的确定碰撞风险,规划避碰的决策和操纵控制船舶的理论。Churkin 和Zhukov 于1998年提出采用线性规划方法的连续离散数学模型求解避碰路径。利用模糊集理论对碰撞风险进行评估,确定避碰机动路径。 Hwang,Kao和Su等人分别在2002年,2007年和2012年相继提出了利用模糊集理论评估船舶的碰撞风险并确定相应的避碰机动路线。Liu和shi于2005年使用神经网络和模糊集理论来评估最具威胁性的目标舰船,并根据COLREGS(国际海上避碰规则)船舶相遇的形式以及船舶的速比和方位来产生相应的船舶避碰动作。Tam 和Bucknall 在2013年 根据COLREGS(国际海上避碰规则)知识库,船舶的机动特性以及船舶的运动方程,有效地解决了多船遭遇情况下的最优避碰路径规划问题。但该研究是建立在被研究的所有船舶的机械性能和水动力学数据都是已知的基础上的。(这些数据包括推进力,阻力,回转半径和停止距离)。
近年来,启发式算法也受到学者们越来越多的关注(Ito等,1999; Smierzchalski 1999; Szlapczynski,2009, 2011; Szlapczynski和Szlapczynska, 2012; Tam和Bucknall,2010年),这是由于该设计方法更加灵活。启发式算法仅搜索更有可能产生解决方案的部分空间。这是一种随机优化技术。它的解可以产生一个接近最优的解,而不是整体最优解决方案。由于启发式算法的这些属性,他的迭代时间和频率都较短。
从上述文献综述中,我们能够推断出可以加强的部分,这也正是本研究中所需要改进的领域:
- 一些研究只考虑到两船碰撞的情况,而不能应用于多船避碰的最优避碰路径规划问题上。当然也有一些基于多穿避碰问题的研究,但这些对多船避碰处理方法的研究仅仅是将多船碰撞转化为一系列两船碰撞问题来处理,缺乏全面的全局性的考虑。
b.无法将COLREGS(国际海上避碰规则)纳入路径规划的原则导致计划的碰撞避免路径不符合航海实践。
c.使用点对象来表示描述自己的船或目标船没有考虑到可能存在的船舶域的特性。
d.仅考虑动态障碍(船舶)而不考虑固定障碍物(岛屿和珊瑚礁)的一些研究只能在公海使用,而不能在限制水域内使用。
e.没有考虑到与ECDIS(电子海图显示和信息系统)和AIS(船舶自动识别系统)的整合。因此,在针对该问题进行研究的基础上,系统的性能和效率都可以进一步提升,以满足未来导航的需要。
f.系统在执行进化算法时,大多数第一代族群是随机生成的,其质量将极大地影响随后的适应度和收敛率。
3.将AIS(船舶自动识别系统)和ECDIS(电子海图显示和信息系统)集成到避碰路线规划平台
我们几乎能够实时地访问AIS(船舶自动识别系统)系统中的相遇信息,这会促使PAD获得几乎实时的更新,以便于确定碰撞危险的变化。这改变了PAD型的ARPA(自动雷达标绘仪),他以前只适用于公海航行,但现在可以直观地应用于具有一定船舶密度的狭窄水道。本研究以AIS和ECDIS与避碰路线规划系统的集成为基础,利用从AIS获得的目标船舶位置和航向信息以及本船的GPS位置来计算避碰所需要的基本参数,这些参数包括方位,距离,最近会遇距离值(DCPA)和最近会遇时间(TCPA)。因此,我们要在ECDIS(电子海图显示和信息系统)中生成、显示和集成所需目标船的信息,以便为进一步避免碰撞路线的规划提供基础数据。
AIS系统提供了船舶位置的经度和纬度、以及目标船的地面航速(SOG)和地面航向(COG)。因此,我们无需重新计算目标船的航向和速度。然而,在计算目标舰船相对于本船舶的位置时,我们仍然需要转换方位和距离以计算DCPA(最近会遇距离值)和TCPA(最近会遇时间值)。
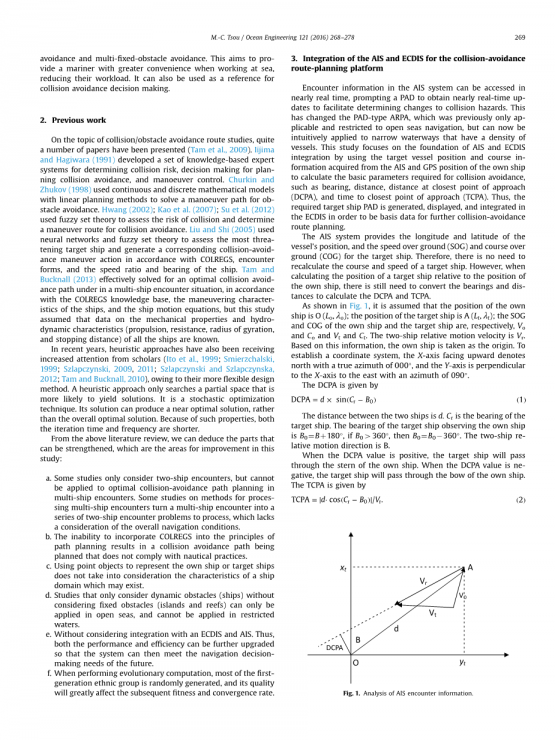
如图1所示,假设本船的位置为O(Lo,lambda;o);目标船的位置是A(Lt,lambda;t),本船和目标舰的SOG和COG分别为Vo 和Co 以及Vt 和Ct。两船的相对运动速度为vr。根据以上这些信息,我们以自己的船为坐标原点,建立一个坐标系。在该坐标系中,朝上的X轴表示北方,其方位角为000°,Y轴垂直于X轴向东方向,方位角为090°。DPCA(最近会遇距离值)的值由以下公式给出:
DCPA = dtimes;sin(Cr - B0) (1)
本船与目标船舰之间的距离是d。。Cr 是目标船的方位。
从目标船舰的方位观察本船:B0=B 180°,若B0gt;360°,则B0=B0-360°。本船与目标舰船的相对运动方向为B。当DCPA(最近会遇距离)值为正时,目标舰船将通过本船的船尾。当DCPA(最近会遇距离)值为负时,目标舰船将通过本船的船首。
TCPA(最近会遇距离)的值由以下公式给出:
TCPA = d·cos(Cr -B0)/ Vr (2)
图1. AIS会遇信息分析
4.PAD在船舶避碰中的集成应用
PAD的应用首先出现在SPERRY ARPA(斯佩里自动雷达标绘仪)系列中。。当其用在避碰避碰时,会将雷达从预测危险的“点”改为预测危险的“区域”。与矢量型ARPA(自动雷达标绘仪)相比,PAD型ARPA(自动雷达标绘仪)提供了更加直观的避碰信息。然而,现在PAD没有安装在任何ARPA雷达设备中,因此没有得以使用。我们需要对PAD的原理有所了解,另外,对数据的误解有可能会导致更大的危险。由于PAD是基于ARPA雷达设备获得的信息建立的,因此ARPA雷达本身在获取信息时的限制将影响PAD的产生(例如盲点,波浪,雨雪干扰)。当雷达信息中的误差较大时,PAD的边界误差同样明显。此外,作为建立PAD的先决条件,本船必须保持恒定的速度,目标船必须保持恒定的速度和航向。在船舶的实际会遇中,为了避免碰撞,两艘船可以采取各自的行动,但PAD信息必须接收实时更新。然而,为了使ARPA雷达在目标上达到稳定跟踪效果以显示足够可靠的信息,需要大约1-3分钟的时间;这将导致PAD的信息产生延迟。因此,从PAD获得的信息不能完全用于确定船舶碰撞的危险。此外,在遇到多艘船的情况下,雷达屏幕会变得过于复杂,这也增加了解释的复杂性。然而,通过对结合ECDIS(电子海图显示和信息系统)和AIS(船舶自动识别系统)的信息进行整合,这种情况能够得到改善。我们可以从AIS获得计算PAD所需要的实时信息,并且可以在ECDIS上进行PAD的计算和生成。ECDIS屏幕可以同时显示目标船舶的图表信息以及PAD防撞信息。
图2显示了船舶PAD的几何映射。在进行映射时,本船位于O点,速度矢量为Vo;目标船舰位于点T,速度矢量为Vt。TO直线是两艘船完全碰撞的相对运动线(DCPA = OD1)。TD1 和TD2 直线分别是目标船通过本船的船首和船的预设的DCPA的相对运动线。假设目标船舶保持其航向和速度,并且本船维持其航速,我们可以确定目标船的航线上的PAD。在映射过程中,T1 作为圆心(TT1=Vt),VO是绘制弧的半径,分别与A1,A和A2 点处的TD1,TO及TD2相交。
图2. PAD的关键原则
这表明当本船采用AT航向时,本船的航线将与P点的目标船的几何避碰线相交,这是预测的碰撞点(PPC)。 当本船采用A1T1 或A2T1时,本船的航线将与目标船的航线在P1 和P2处相交,这恰好是PAD的两个顶点。自己船的船首线通过点P1或P2表示目标船舶将以安全的DCPA(最近会遇距离)值通过本船,当本船的航线与PAD相交时,表明目标船不能以安全的DCPA(最近会遇距离)值通过本船。
OOW可以使用电子轴承线绘制本船的危险航向范围并获得相应的转弯幅度。在不经过试验机动方法的情况下,OOW可以获得转弯角度,减少了避碰决策所花费的时间。在多船会遇的过程中,OOW仍然可以参考每艘船的PAD形状及其位置,直观地确定最危险的船舶,然后做出正确的避碰策略。
- GIS在避碰路径规划中的应用
5.1固定/非固定障碍物的GIS处理
路线规划是ECDIS中最重要的功能之一,实现它的方法主要与GIS有关。GIS是处理ECDIS中空间数据的一个非常重要的模块,特别是与空间数据,路线规划和路线检查相关的预处理方面。在本研究中,GIS模块在以下方面发挥作用:
5.1.1空间数据预处理
路径本身是线性空间对象,而与导航相关的空间数据由三种类型的基本空间数据结构构成:点,线和多边形。因此,所涉及的处理和分析正是这三个基本对象之间的交互操作:
(1)点对象可以包括孤立的珊瑚礁,沉船,导航设备等。它们具有一定的影响范围;通常,路线会避开它们。
(2)线对象包括危险的轮廓线,海底电缆等。它们也有一定的影响范围。通常,路线会避开它们并尽可能地避免穿越它们。
(3)多边形物体有许多类型,包括障碍物的边界和其他自然和文化区域的边界。它们也有一定的影响范围。通常,路线会避开它们,并尽可能避免越过它们。我们还对此类别中动态船舶的六边形PAD进行了分类。
从上面可以看出,每种类型的空间物体及其影响范围都会影响路线规划。因此,我们必须通过将所有空间对象放大为多边形来设置每个空间对象上受影响的缓冲区(如图3).缓冲区大小是可以由用户基于不同对象和目标来调整的参数。该功能是GIS的基本功能。由于本研究以GIS为平台,因此GIS直接生成缓冲区。因此,在本研究中,所有的障碍和目标船舶的PAD被视为多边形,故可以使用多边形障碍物的方法对其进行处理。这个过程很简单,处理结果的质量很高。
图3.各个空间物体的缓冲区(邹,2010).
5.1.2空间数据分析
在确定每个空间对象的缓冲区和多边形之后,我们需要在GIS中重新应用交叉函数来进行测试。通过对路线和障碍物的交叉测试,我们可以确定哪些空间物体与该路线相交,交叉点和交叉点的长度,从而确定路线是否可行以及如何规划避碰。
5.2建立初始路线
从文献综述中我们看到,大多数研究通过随机方法产生了一组初始路线,因此它们包含许多质量差的个体(例如违反避碰规则或跨越障碍的路线)。这种类型的初始路径确实会影响迭代过程中个体的适应性以及迭代的速度。
前面部分我们介绍了利用GIS对空间数据进行分
资料编号:[6028]

