
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
基于霍尔效应场传感器测量的永磁同步电动机转子偏心在线检测
Yonghyun Park * , Daniel Fernandez ** , Sang Bin Lee * , Doosoo Hyun * , Myung Jeong * , Suneel Kumar Kommuri * ,
Changhee Cho *** , David Reigosa ** , and Fernando Briz **
\ 韩国大学电气工程系 邮件:sangbinlee@korea.ac.kr
\西班牙奥维耶多大学 电气工程系
\韩国始兴京畿科学技术大学 精密机械工程系
摘要 - 永磁同步电机(PMSM)中的转子偏心会增加不平衡磁拉力和电机振动,导致电机组件老化加速。 如果未检测到偏心,则其严重程度会增加,并增加定子 - 转子接触的风险,从而导致电机和被驱动过程的强制停机。 目前偏心率的检测依赖于离线测试和在线振动/电流频谱分析,这些分析不方便或不能提供可靠的检测,因为它们受到电机或负载中其他机械非理想因素的影响。 本文研究了利用模拟霍尔效应场传感器检测偏心率的可行性。 结果表明,用于运动控制的机器中已经存在的霍尔传感器可以用于测量由于偏心引起的电机内部通量的变化。 三维(3D)有限元分析(FEA)和在内部永磁同步电动机(IPMSM)上进行的实验结果表明,所提出的方法可以通过最少的硬件修改提供敏感和可靠的动态和混合偏心检测。
关键词:轴向泄漏磁通,状态监测,有限元分析,霍尔效应磁场传感器,永磁同步电机,转子偏心率。
- 介绍
永磁同步电机(PMSM)由于其在效率和功率密度以及易于控制方面的优势而在许多应用中取代感应电机。 随着近期对永磁同步电动机的需求增加,对永磁同步电动机驱动系统故障的分析和检测已经有很多研究活动,如转子偏心率,永磁体退磁,轴承和负载对准/不平衡相关故障[1] - [11]。 有三种类型的转子偏心:静态,动态和混合偏心(SE,DE和ME)。 SE是最小径向气隙位置固定的条件。 这可能是由制造或组装过程中引入的缺陷引起的,其水平很少随时间而改变。 DE是最小气隙与转子一起旋转的位置,由转子的缺陷,磨损的轴承,弯曲的轴等产生。SE和DE通常以ME共存,其固有水平在10以内的气隙[12] - [13]。 偏心率(SE,DE或ME)导致不平衡的磁拉力,这导致增加的振动,噪声,轴承磨损和/或转子偏转。 必须检测出DE和ME,因为它们随着时间的推移会严重增加,从而增加定子 - 转子接触的风险,这会导致PM,铁芯和定子绕组绝缘受到严重损坏[11] - [13]。
许多研究人员开发了检测转子偏心率的技术,以提高永磁同步电机驱动系统的性能和可靠性[3] - [11]。 用于检测偏心率的传统测试包括百分表和塞尺测试[11] - [13]。 由于转子相对于其中心手动旋转,所以可以使用精密百分表来测量转子的圆度以检测DE。 塞尺还可用于测量转子在不同位置的气隙分布,以测量SE,DE或ME。 尽管这些测试可以精确评估偏心率,但由于它们需要全部或部分电机拆卸,手动转子旋转和/或专门的测试设备或设置,因此无法频繁使用。 在[11]中,提出了一种基于逆变器注入信号的离线偏心测试; 但是,它要求电机停止测试。
在[3] - [4]中对基于数学模型的磁通量进行了研究,以检测PMSM转子故障; 然而,它们被认为对非理想的模型误差和电动机参数变化敏感。 在[5] - [6]中,在线监测转子转速频率fr,基频边带(fs),fecc,由下式给出
, (1)
(2)
从振动,轴电压或通量谱研究,其中p是极对的数量,k是正整数。 但是,主要的局限性是需要物理访问电机进行巡视型监控或永久安装传感器。 如果使用便携式设备进行监控,维护人员将面临安全风险,尤其是在电机在恶劣环境中运行的情况下。 将传感器和电缆加装到电机上进行永久安装也会增加系统成本并降低系统可靠性。 因此,最近的大部分研究都集中在应用电机电流特征分析(MCSA),其中监测定子电流频谱中的fecc分量。 MCSA可以使用现有的传感器从逆变器提供远程在线监测,并且独立于电机数学模型[3] - [4],[7] - [10]。 尽管MCSA具有许多优点,故障的可检测性取决于绕组配置[1],并且对于输入频率或负载变化的非平稳条件下运行的电机,需要复杂的时间频率分析技术[9] - [10]。 另外,PMSM中的非理想性
驱动系统如不对中,负载不平衡或其他机械不对称会产生与fecc相同的边带组件,并且没有实际的方法将它们分开[3] - [4]。
从前面的讨论可以得出结论,在现场应用现有的PMSM偏心检测方法存在很多限制。 因此,开发新的测试方法能够提供独立于电机设计或模型并且无需附加传感器的远程在线检测偏心故障,这是非常理想的。 这项工作的主要想法是利用电机运动控制中所需的霍尔传感器。 本文评估了使用模拟霍尔传感器检测转子偏心率的可行性。 针对IPMSM的三维有限元分析和实验研究表明,所提出的方法能够以最少的硬件修改提供敏感和可靠的DE和ME故障检测。
- 基于ANSYS的HALL传感器测量分析
偏心条件
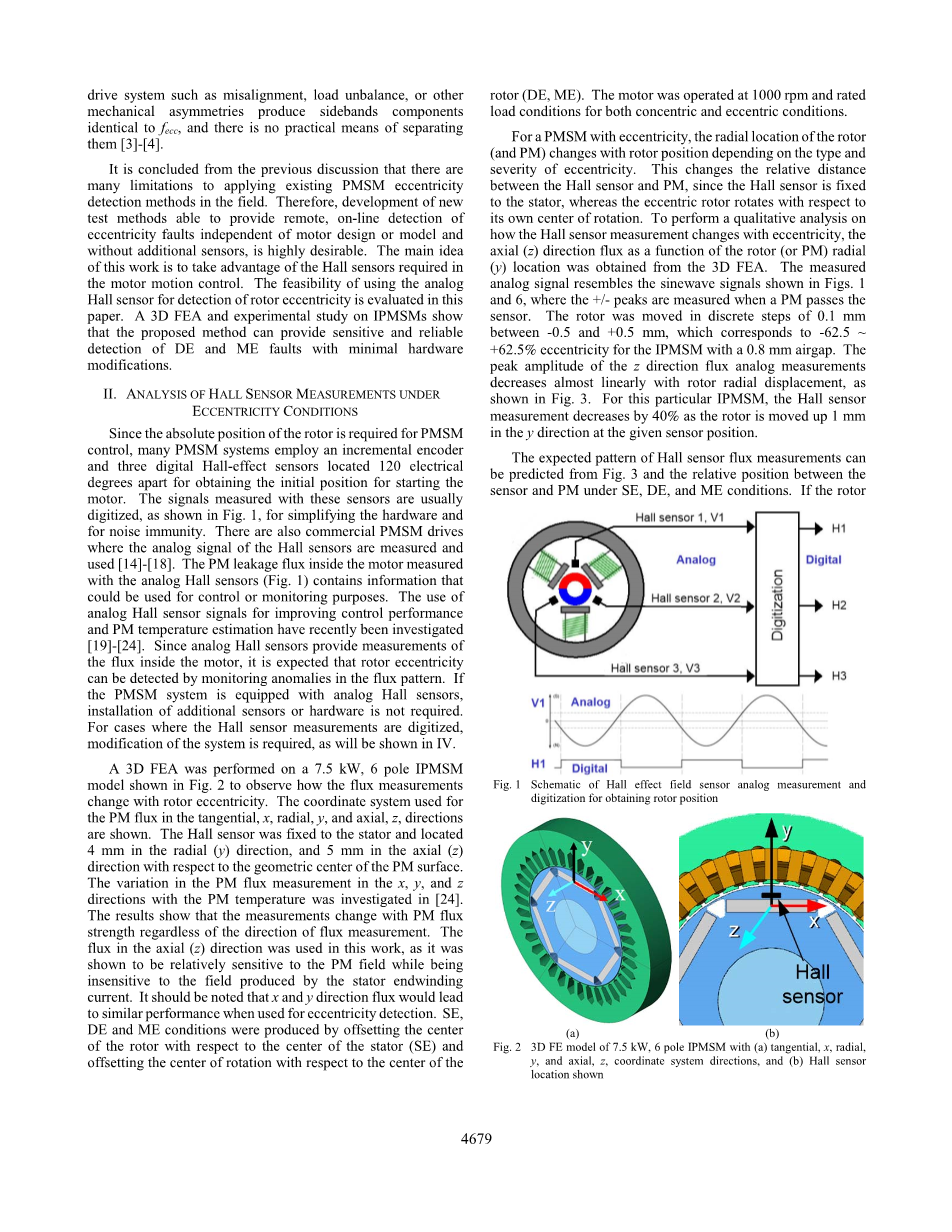
由于PMSM控制需要转子的绝对位置,因此许多PMSM系统采用增量式编码器和三个120度电角度的数字霍尔效应传感器来获得启动电机的初始位置。 这些传感器测得的信号通常是数字化的,如图1所示,用于简化硬件和抗噪声。 还有商用PMSM驱动器,霍尔传感器的模拟信号被测量和使用[14] - [18]。 使用模拟霍尔传感器(图1)测量的电机内部的PM漏磁通包含可用于控制或监控目的的信息。 最近研究了使用模拟霍尔传感器信号来改善控制性能和PM温度估计[19] - [24]。 由于模拟霍尔传感器提供电机内部通量的测量,因此可以通过监视通量模式中的异常来检测转子偏心率。 如果PMSM系统配备模拟霍尔传感器,则不需要安装额外的传感器或硬件。 对于霍尔传感器测量数字化的情况,需要对系统进行修改,如IV所示。
在图2所示的7.5kW,6极IPMSM模型上进行三维有限元分析,观察通量测量结果随转子偏心率的变化情况。 显示了用于切向,x,径向,y和轴向,z方向的PM通量的坐标系。 霍尔传感器固定在定子上,相对于PM表面的几何中心位于径向(y)方向4毫米,轴向(z)方向5毫米。 文献[24]研究了在PM,x,y和z方向测量PM通量随PM温度的变化。 结果表明,无论流量测量方向如何,测量结果都随PM通量强度而变化。 在这项工作中使用轴向(z)方向的磁通,因为它显示出对PM磁场相对敏感,而对由定子端绕组电流产生的磁场不敏感。 应该注意的是,当用于偏心检测时,x和y方向的通量会导致类似的性能。 SE,DE和ME条件是通过使转子的中心相对于定子(SE)的中心偏移并使旋转中心相对于中心偏移而产生的转子(DE,ME)。
电机在1000 rpm和额定负载条件下运行,适用于同心和偏心条件。
对于具有偏心率的PMSM,转子(和PM)的径向位置随转子位置而变化,这取决于偏心率的类型和严重程度。 这改变了霍尔传感器和PM之间的相对距离,因为霍尔传感器固定在定子上,而偏心转子相对于其自身的旋转中心旋转。 为了对霍尔传感器测量结果如何随着偏心率变化进行定性分析,轴向(z)方向通量作为转子(或PM)径向的函数
- 位置来自3D FEA。 测量的模拟信号类似于图1和图2所示的正弦波信号。 1和6,当PM通过传感器时测量 /-峰值。 转子在-0.5和 0.5mm之间以0.1mm的不连续步进移动,这对应于-62.5°
气隙为0.8 mm的IPMSM的偏心率为 62.5。 如图3所示,z方向磁通模拟测量的峰值振幅几乎与转子径向位移线性减小。对于这个特定的IPMSM,随着转子在y方向上移动1 mm,霍尔传感器测量值减少40在给定的传感器位置。
霍尔传感器通量测量的预期模式可以从图3中预测,并且在SE,DE和ME条件下可以预测传感器和PM之间的相对位置。 如果转子
图1霍尔效应场传感器模拟测量和数字化获取转子位置的示意图
-
- (b)
图2 7.5 kW,6极IPMSM的三维有限元模型(a)切向,x,径向,y和轴向,z坐标系方向,以及(b)霍尔传感器位置
图3作为转子径向的函数的轴向(z)方向峰值通量测量
- 位置(对应于-62.5和 62.5转子偏心率) 图4霍尔传感器的位置,以及相对径向位置的轨迹
是同心的,霍尔传感器和所有PM之间的距离在转子旋转时是均匀的。 图4显示了霍尔传感器和PM之间相对径向位置的轨迹,如图4所示。由于传感器和PM之间的距离是恒定的,因此N极(正极)和S极(负极)通量测量的峰值对于同心转子是恒定的,如图6(a)中的有限元分析结果所示。
在SE条件下,转子的中心偏离定子的中心,并且转子相对于其自身的中心旋转。 因此,传感器和PM之间的相对距离是恒定的,但与图4中所示的同心情况不同。图5示出了SE,DE和ME情况下传感器和PM之间的相对位置的轨迹。 轨迹表示PM和传感器之间的相对位置在转子旋转时如何变化。 如图5(a)所示,轨迹的大小(直径)随同心圆的中心变化而变化。 轨迹根据转子SE相对于霍尔传感器的方向而改变。 图5(a)显示了与同心圆情况相比,SE的两个极端情况的轨迹,其中转子在相同和相反的方向上偏移(图2中的y轴方向)。 由于传感器和PM之间的径向距离(转子向上移动)的减小导致测量的通量减小,因此可以从图4和图5中预测出。 如图3(a)所示,如果SE处于霍尔传感器的方向(图5(a)中直径减小的轨迹),则N和S极点的振幅均匀减小。 如果SE与霍尔传感器的方向相反,则N和S极点峰值均匀增加(图5中的直径增大的轨迹)
霍尔传感器和PM用于同心转子
图5(a))。 从霍尔传感器方向30°和60°SE的3D FE获得的模拟霍尔传感器测量波形如图6(a)所示。
在DE条件下,转子的中心偏离定子的中心,并且转子相对于定子的中心旋转。 传感器和PM之间的相对位置的轨迹取决于DE的方向,如SE的情况。 由于转子相对于定子的中心旋转,所以轨道的中心偏移其直径与同心圆的直径相同。 图5(b)显示了DE条件下N极DE与霍尔传感器相同和相反方向的运动轨迹以及同心圆情况。 从图中可见, 如图3和图5(b)所示,可以预测,随着传感器离PM更远,相邻峰的一半(p)增加,并且随着传感器更接近PM,另一半峰随着DE减小。 这可以在图6(b)所示的传感器的相反方向上的N极30°和60%DE的三维有限元分析结果中看出。 正如预期的那样,前3个SNS极点振幅增加,下一个NSN极点振幅减小。
ME条件下的通量模式更复杂,因为它是SE和DE的组合。 传感器-PM距离轨迹的大小和中心都随着ME而变化。 SE和DE的组合可以产生ME。 在图5(c)中示例性地示出了30°SE在传感器的方向上并且N极的30°DE在传感器的相反方向上的情况,以及轨迹
-
- (b) (a)SE,(b)DE和(c)ME的霍尔传感器和PMs之间相对径向位置的轨迹
同心的情况。 如果SE和DE的程度相同,则可以从图4和图5中预测出来。 从图3(c)可以看出,图5(c)顶部N极磁通的峰值与同心圆相同,其余峰值振幅减小,因为霍尔传感器更接近PM。 如图6(c)所示,在这种ME条件下通量测量的3D FEA结果显示,通量中只有一个N极峰是相同的,其他5个峰相对于同心情况下降,如预测的那样。 当与30%SE的情况相比时,前3个SNS极点增加并且下一个NSN极点降低。 三维有限元分析结果表明,N和S极磁通量测量的峰值对于SE是均匀的,但由于存在DE组分,对于DE和ME条件是不均匀的。
- 实用考虑
虽然3D FEA清楚地表明霍尔传感器测量可用于检测转子偏心率,但仍有一些不理想的问题需要考虑实施。 为了可靠地检测偏心,重要的是了解其他类型的故障或制造缺陷/缺陷如何影响所提出的方法。 考虑PM温度变化,定子绕组电流干扰和霍尔传感器特性的温度依赖性的影响也很重要。
由于PM直接影响霍尔传感器的测量,因此PM去磁是另一个对所提出的方法有重大影响的故障。 均匀或对称的退磁将导致测量的PM通量中的所有峰均匀减少,类似于SE。 预期局部或不对称的PM退磁会减少已经消磁的相应PM的磁通峰值。 由于霍尔传感器测量也可以用于检测退磁,所以这是所提出的方法的另一个潜在优点。 然而,这项工作的重点是检测转子偏心率。
可能影响所提出的方法的制造缺陷是安装在转子中的PM的磁强度或定位的不匹配。 尽管在大多数情况下磁通峰值均衡很好,但即使对于具有同心转子的新电机,较低成本的电机在峰值中也倾向于具有较大的不对称性。 为了保证在PM不对称情况下的可靠故障检测,需要基于监测磁通峰值的“变化”的故障检测算法,该变化相对于调试时获得的“变化”是必需的。
还有其他因素会影响磁通量测量的幅度,如PM温度,定子端绕组电流干扰和与温度相关的霍尔传感器特性[24]。 PM通量随着PM温度而变化,因此霍尔传感器测量也将随着PM温度而改变。 此外,霍尔传感器的输出也取决于其温度,尽管这可以通过使用温度补偿霍尔传感器或使用恒定电流源[16] - [17],[24]来降低。 此外,除了PM通量之外,传感器还从定子绕组电流中拾取漏磁通,因此测量值随电流(或负载)的幅度而变化。
全文共13213字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15819],资料为PDF文档或Word文档,PDF文档可免费转换为Word

