英语原文共 26 页,剩余内容已隐藏,支付完成后下载完整资料
无人地面车辆仿真模型的设计和验证
摘 要
在本文中,我们提出了一个自主无人表面车辆(USV)Halcyon的多物理场仿真模型。 本文提出的仿真模型已经开发出来,以快速推进Halcyon自治管理系统的设计,开发和验证,特别是在具有挑战性的海况下。 为此目的使用模拟可以在整个船舶的环境工作范围内进行广泛的测试,因此大大减少了对实际海上试验的需求。 该模拟器由新颖而全面的海面波浪环境模型,六自由度非线性统一的耐波性和机动船动力学模型,驱动动力学模型,自动驾驶仪和具有自治管理系统的界面组成。 结果表明,现实世界和模拟海洋试验数据显示出良好的一致性。
关键词:多物理学船舶建模波浪建模仿真模型验证
1.介绍
无人地面车辆(USVs)是一种自行驾驶的水上运载工具,无需任何人员即可在水体表面作业。 它们类似于机载无人机(UAV)和水下无人水下机动车(UUV) [1]。 USV被广泛用于在海洋学领域进行科学研究 [2] 和气象学 [3] 并在石油和天然气行业也有应用。 在国防部门内部,目前正在开发USV,用于包括反潜战和扫雷在内的多个角色。 目前正在由泰利斯英国和ASV Global开发的Halcyon就是其中一种这样的USV,用于自动扫雷任务。 本文提出的仿真模型是为了帮助开发,测试和验证Halcyon的自治管理系统而开发的。 为此目的使用模拟减少了进行耗时且昂贵的海上试航的需要,并且允许在船舶必须运行的环境条件下具有更大的灵活性。 这种灵活性提供了能够使用相同的“随机”波浪环境测试和评估多个导航,导航和控制(GNC)系统的额外优势。 为此,模拟器采用了一种新型的海面波浪环境模型,该模型是多个光谱波模型的集成,能够模拟由海浪,局部风,地表水流和海水深度产生或受到影响的全方位表面波。
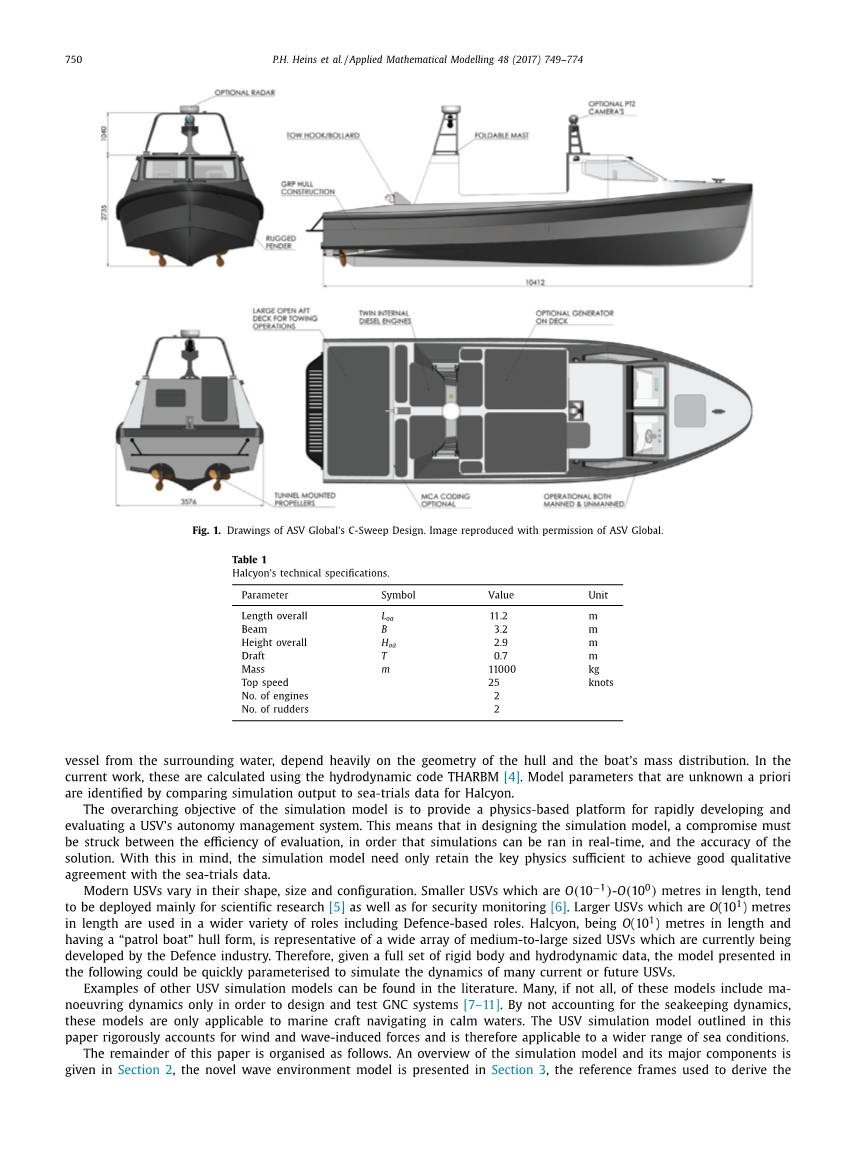
ASV Global的C-Sweep,与Halcyon类似的船只的图纸显示在 图。1 并给出了一个简要的技术规范 表格1。 该艇的水动力参数,决定了各种力量的传递
船只从周围的水,很大程度上依赖于船体的几何形状和船的质量分布。 在目前的工作中,这些是使用流体动力学代码THARBM计算的 [4]。 先验未知的模型参数通过比较模拟输出和太平洋的试航数据来确定。
仿真模型的总体目标是为快速开发和评估USV的自治管理系统提供基于物理学的平台。 这意味着在设计仿真模型时,必须在评估的高效性之间达成折衷方案,以便可以实时模拟仿真,并确保解决方案的准确性。 考虑到这一点,仿真模型只需保留足够的关键物理特性即可与海洋试验数据达到良好的定性一致性。
现代USV的形状,大小和配置各不相同。 较小的USVs是O(10minus;1) - O(100)米,通常主要用于科学研究 [5] 以及安全监控 [6]。 较大的USVs是O(101)米
长度被用于更广泛的角色,包括基于防御的角色。 Halcyon是O(10英尺1)米长,具有“巡逻艇”船体形式,是国防工业目前正在开发的各种中型到大型USV的代表。 因此,给定一套完整的刚体和流体力学数据,下面提出的模型可以快速参数化,以模拟许多当前或未来USV的动力学。
其他USV仿真模型的例子可以在文献中找到。 这些模型中的很多(如果不是全部的话)仅包括机动动力学,以便设计和测试GNC系统 [7–11]。 通过不考虑吸波动力学,这些模型仅适用于在平静水域航行的船舶。 本文概述的USV模拟模型严格考虑风力和波浪引起的力,因此适用于更广泛的海况。 本文的其余部分安排如下。 模拟模型及其主要组成部分的概述在附录中给出 第2节,这个新的波浪环境模型在 第3节,用来导出的参考帧
5. 4.
图2.模拟模型组件之间的相互作用图:1.波浪环境模型,2.动力学动力学模型,3.船只动力学模型lowast;,4.自治管理系统界面,5.自动驾驶仪。 lowast;经Thales许可转载的图像。
仿真模型概述于 第4节,第6节给出了六自由度刚体动力学模型,第6节概述了驱动动力学模型,讨论了自动驾驶仪和自治管理系统的接口 in 第7节,第8节 介绍了海试验验证和模型调整练习,最后给出了最后的结论 第9节.
2.仿真模型概述
仿真模型由五个主要组件构成:六自由度船舶动力学模型,驱动动力学模型,波浪环境模型,与自治管理系统的接口和自动驾驶仪。 这些都在说明 图2.
具有uid记忆效应的六自由度非线性unied seakeeping和机动模型 [12] 用于模拟太平洋的惯性运动。 该模型包括与速度相关的阻尼和流体动力学附加质量。 波感应力被模拟为一组基于速度的响应振幅算子(RAO)数据,这些数据是使用基于船体几何形状的流体动力学代码计算出来的。 Halcyon的方向舵,螺旋桨和发动机模型也已经开发出来,可以准确地模拟船只的启动动态。
除了船舶动力学模型外,还开发了多物理场波动环境模型来模拟动态环境扰动。 该模型产生由阵风,海水膨胀,地表水流和海水深度共同作用产生的全方位表面波。 这是通过集成几个半经验谱模型来实现的。
Halcyon的自治管理系统在MOOS-IvP中实施 [13],这是一个无人驾驶车辆的开源自主架构。 MOOS-IvP根据竞争行为解决多目标优化问题,以确定如何执行任务。 行为是独立的控制/任务目标,例如导航到航点或避免物体碰撞,并要求从Halcyon发送某些传感器数据,例如GPS位置。 MOOS-IvP发送所需的速度和航向信息。 仿真模型包括与MOOS-IvP的接口,使得仿真可以与自治管理系统通过网络实时反馈。 包含在仿真模型中的自动驾驶仪根据MOOS-IvP发送的期望速度和航向信息确定推力和方向舵设置。 自动驾驶仪由专门为Halcyon调谐的三个比例 - 积分 - 微分(PID)控制器组成。
3.波浪环境模型
由于周围波浪产生的流体动力作用,相对较轻的容器,如Halcyon,会在所有六个自由度上发生显着的扰动。 因此,必须适当地模拟表面波及其与运动船的相互作用。
图3.在波浪环境模型中如何产生波振幅的示意图。
船只经历的一阶波动力tau;波isin;R6计算如下 [14]:
其中dofisin;{1,2,3,4,5,6},rho;w= 1025kg / m3是海水密度,g = 9.81m / s2是重力加速度,
F波isin;C6是复数归一化力响应振幅算子(RAOs),Ak,theta;isin;R是
最后,Eきisin;[0,2pi;]是随机相加分量,遇到频率omega;eisin;R是空间波数kiisin;R和方向theta;j dened:
omega;2
omega;e(U,ki,theta;j):=omega;i - iUcos(theta;j), (2)
2:= gkitanh(kid)式
[15] disin;R表示水深。
波浪环境模型计算来自波浪模型组合的波幅AKI,theta;j的
(SWMs),它模拟海洋膨胀,局地风,地表水流和海水深度的影响。 对于一组给定的输入,例如水深和风速,每个SWM产生一个连续的全向波能谱。如果(k,theta;)isin;R。在波浪环境模型中,Elfouhaily(EY) [16] 和Texel-MARSEN-ARSLOE(TMA) [17] spectra
总= \ IfEY \ IfTMA。 这与类似
Torsethaugen [18] 和Ochi-Hubble [19] 具有低频(海洋膨胀)和高频(局部风)谱峰的多峰SWM。 但是,Torsethaugen和Ochi-Hubble SWM都没有包括黑水深度的影响。 然后将总波能谱乘以Nwogu的当前影响谱 [20],C(k,theta;)isin;R,to
产生最终的连续波能谱:
如果最后(k,theta;)= C(k,theta;) (3)
其中◦表示Hadamard点积。 离散波振幅由以下计算 (3) 如:
AKI,theta;j的= 如果最后(ki,theta;j)kif .. kf ..theta;, (4)
其中f .. k:= ki 1-ki和f ..theta;:=theta;j 1-theta;j。 显示如何产生波振幅的示意图如图所示 图3.
所有全向SWM都具有以下形式:
(k,theta;)= S(k)D(k,theta;), (5)
其中S(k)isin;R称为单向波谱,D(k,theta;)isin;R称为扩展函数。 S(k)表示波的空间频率中包含的能量的量,并且可以单独用来重建单向表面波。 需要D(k,theta;)将波能量扩散到沿主波方向以外的方向传播的波。 以下部分将概述波浪环境模型中使用的SWM。
3.1.Elfouhaily(安永)频谱
EY全方位SWM [16] 用于模拟海洋膨胀的影响。 它是通过将几个预先存在的SWM的结果统一到一个模型中开发出来的,并且它被广泛用于海洋表面建模 [21,22]。 对于EY频谱,S(k)包含一个低频波谱,一个修正的JONSWAP频谱 [23],以及高频波谱。 它结合了扩散功能,确保长波与主风向对齐,短波更具有定向性; 从雷达观测中看到的东西 [16]。 EY SWM被给出为 [16]:
其中参数向量AEY= [Ustimes;fbeta;s]n,Us在海平面以上10米处膨胀风速,xF取米,beta;s原理膨胀的方向。
低频谱分量被建模为:
Q是无量纲反波年龄,c是波相速度。
高频谱分量建模为:
ulowast;是水面摩擦速度。
EY SWM中使用的扩展函数如下所示:
cos(theta; beta;)72
一个例子EY光谱被绘制在 图4(一个)。 可以看出,EY谱具有高度的方向性,对于远离主风向的波浪传播的波浪具有显着的能量部分。 注意,在该图中,kx= kcos(theta;)是朝北的波数矢量,并且ky= ksin(theta;)是朝东的波数矢量。 图5(a)是使用图中所示的光谱产生的海面高度(eta;)图 图4(一个)。 波浪的高方向性更容易在该图中可视化。
请注意,在 图 五(a),(b)和 7 大量的波浪被用来产生海面标高图。 这仅用于说明目的。 USV仿真模型中包含的单个波的数量通常要小得多。 例如,模拟中包含的波的数量 第8节 是322。 这足以捕捉到不可忽略的波浪引起的力量。
图4:南风暴风速10 m / s,104(k)(kx= k cos(theta;),ky= k sin(theta;))的等值线图c= 2米/秒,南风骤升风速10米/秒,104公里,并与海态5相对应。(b)log10 EY表示海面状况5。
图5.海面高程图:(a)使用EY谱图产生的海洋膨胀 图4(a),(b)海洋膨胀逆着使用EY光谱和电流侵入频谱产生的表面电流行进 图4(b)中。 这两块地块都由5122波组成。
3.2.Texel-MARSEN-ARSLOE(TMA)谱
TMA SWM [17] 用于模拟局地风和海水深度对海浪振幅的影响。 该模型是单向的JONSWAP谱 [23] 已经被修改以包括黑水深度的影响。 对于给定的一组输入参数,TMA频谱的峰值随着水深减小而减小,即波浪具有较少的能量。 对于深水,d→infin;,TMA谱收敛于JONSWAP谱。 单向TMA谱是 [17]:
其中参数向量ATMA= [Uwdbeta;macr;w]n,Umacr;w是海平面以上10米处的平均局部风速,d是水深,beta;macr;w是当地风向的平均原理,
0.09 omega;gt;omega;p
图6.对于南风平均当地风速为10 m / s,s = 50,d的log10TMA(kx= kcos(theta;),ky= ksin(theta;) = 20米,对应于海况3。
线性色散关系用于将峰值角频率omega;p数值转换为峰值波数kp,即:
omega;2= gkptanh(kpd)。
通过这种关系产生有限的水深效应。
为了计算方向波谱,如 (5),需要传播功能。 波浪环境模型使用具有TMA单向频谱的#39;余弦-2s#39;扩展函数来模拟局部风力效应,其给出为 [24]:
( 2(2s-1)\( r2(s 1) \2s (theta; beta;macr;w\
其中s称为扩散参数,r(·)表示伽马函数:
r(n)=(n-1)! 。 (12)
s值越大,波浪与主风向的对齐就越多。 从物理意义上说,由局部风产生的波与风向密切对齐,因此使用s = 50的高扩展参数。 一个定向TMA光谱的例子绘制在 图6。 与绘制的EY光谱相比较 图4(a)所示,TMA谱显示出少得多的方向性,大部分能量被分配到与主要风向紧密对齐的窄波段。 这可以更容易地看到在图中显示的海面情况 图7 这是使用频谱绘制的 图6.
3.3.Nwogu目前的影响力
表面潮流可以通过各种环境因素产生,如潮汐,风和科里奥利效应。 高速流动会对表面波产生很大影响。 当波与电流相反时,它们的幅度增加并可能最终破裂。 用电流传播的波浪的幅度会减小。 Nwogu [20] 设计了一种改变波能谱以包括表面电流效应的方法。 这是通过将没有电流的波谱用元素方式乘以电流影响谱C(k,theta;)来实现的。 当前的影响范围被定义为 [20]:
C(k,theta;,A):= 1 minus; 7, (13)
kC的g0 Uck costheta;
其中参数矢量AN= [Ucbeta;c]n,Uc为表面电流速度,beta;c为电流主方向,
0,c=theta;0,c=beta;c-theta;0,theta;c=beta;c-theta;,
Cg:=part;omega;/part;k是波相对于电流的群速度,下标0的变量表示没有电流影响的值。 上述模型的主要局限性在于当Cg Uccostheta;接近零时,它会产生不切实际的方向能谱大值。 当达到极限Cg= -Uccostheta;时,波就不能再穿透电流,实际上,在到达该点之前会断开。 波浪环境模型既不模拟也不模拟破浪。 因此,Nwogu的电流强度谱有两种修改方式。 首先,“破波
全文共23943字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15472],资料为PDF文档或Word文档,PDF文档可免费转换为Word

