
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
Mecanum轮的几何和运动学
A.Gfrerrer
格拉茨技术大学几何研究所,Kopernikusgasse24,8010Graz,Austr
摘要
当需要车辆的全向可调性时,使用Mecanum轮。这意味着车辆可以沿着规定的路径移动,同时围绕其中心任意旋转。Mecanum轮由一组围绕轮轴布置的辊子组成。在本文中,我们详细描述这些辊子的几何形状。我们推导出辊子生成曲线和辊子表面本身的简单典型参数化。这些参数表示了辊子的几何形状。在他们的帮助下,我们可以很容易地找到用于制造目的的圆环表面的近似值。在辊子参数化的基础上,研究了一种具有Mecanum轮的车辆的运动学。
关键词:Mecanum轮、正向运动学、逆运动学
copy;2008ElsevierB.V.保留所有权利。
1.介绍
Mecanum轮(图1左图)由瑞典工程师BengtIlon于1973年发明。它由一组对称放置在轮体周围的一致辊子组成。每个辊子的表面都是旋转表面的一部分,该旋转表面的轴线b倾斜于轮轴线a。通常选择plusmn;45°的a和b之间的角度delta;。图1右侧显示了装备有三个这种类型的轮子的移动机器人。它们中的每一个都由一个单独的电机驱动,为车辆提供了在水平地面上进行全方位运动所需的三个自由度。本架构的优点是没有一个车轮需要操纵。轮子围绕它们的轴线被动旋转。
Dickerson和Lapin(1991)的辊子生成曲线的参数化是相当复杂的,并没有揭示辊子的几何形状。在描述几何的帮助下,我们得到了这条曲线的一个非常自然的参数化,并且产生了辊子表面及其子午线的简单参数化表示(第2节)。在第3节中,我们使用这些参数来替代一个近似圆环面的辊子。此外,我们推导出具有Mecanum轮的运动学系统的精确速度公式(第4节,公式(15))。对于“确切”,我们指的是辊子轴接触点C和地形的位置也被考虑在内。在Mecanum车轮的运动学文献中(作为一种简化),总是假定C在任何时刻恰好位于车轮中心的下方(例如参见Viboonchaicheep et al.(2003)或Siegwart and Nourbakhsh(2004,第59页))。通过这种简化,我们最终研究了一台配备三个Mecanum车轮的车辆(4.1节),并给出了这样一个机器人正向运动学的可解性的一个很好的几何表征。
图1.左侧:Mecanum轮;右侧:带有3个Mecanum轮子的车辆
2.Mecanum轮的辊子的几何
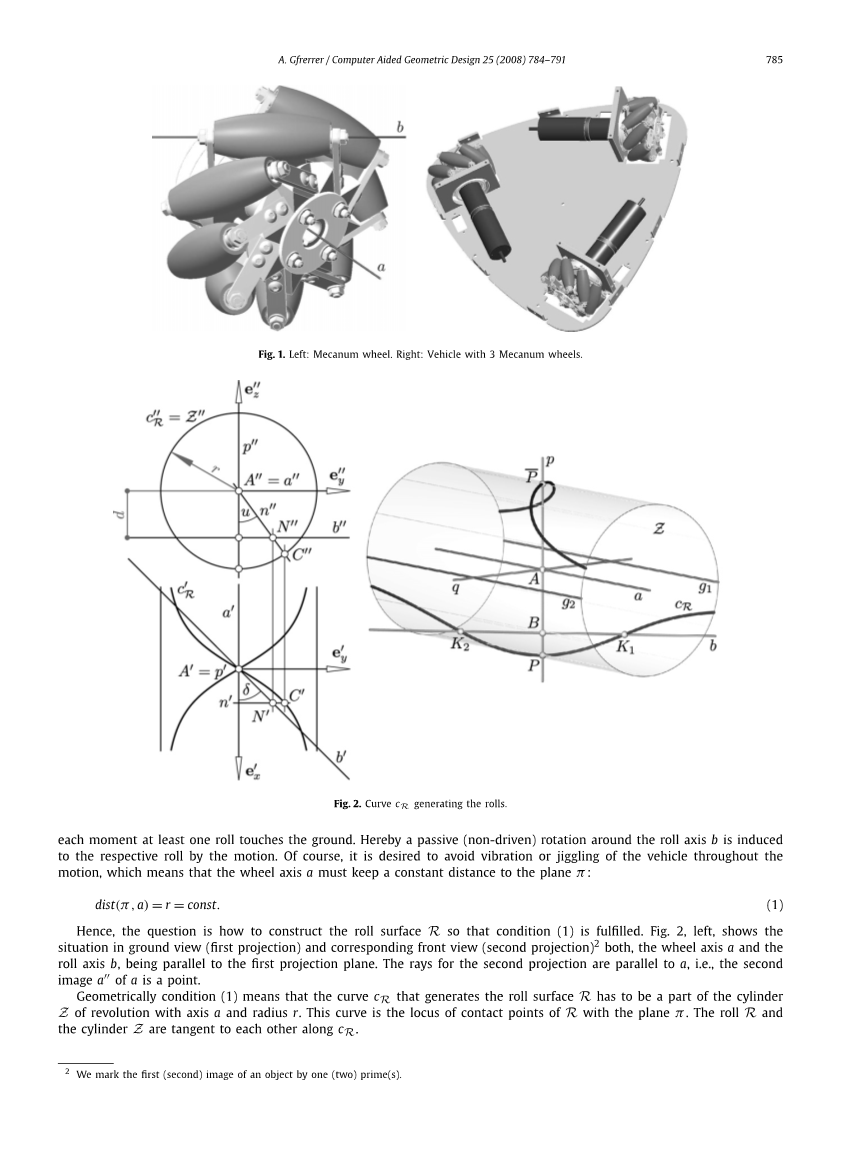
Mecanum轮的滚轴建立一组k轴等距离的发电机,属于回转轴线为a的单片双曲面H上的回旋曲。如果轮子在地平面pi;上移动,其轴线a保持平行于pi;,那么每个时刻至少有一个滚子接触地面。由此,通过该运动将围绕滚动轴线b的被动(非驱动的)旋转引导至相应的辊子。当然,希望在整个运动中避免车辆的振动或摇摆,这意味着车轮轴线a必须与平面pi;保持恒定的距离:
Dist(pi;,a)=r=const (1)
因此,问题是如何构造辊子表面R以满足条件(1)。图2左侧显示了平行于第一投影平面的地面视图(第一投影)和相应的前视图(第二投影)2两个轮轴线a和平行轴线b的示意图。用于第二投影的光线平行于a,即,a的arsquo;rsquo;的坐标是点。
图2.产生辊子的曲线cR
几何条件(1)意味着产生滚动表面R的曲线cR必须是具有轴线a和半径r的回转圆柱体Z的一部分。该曲线是R与平面pi;的接触点的轨迹。辊子R和圆筒Z沿cR彼此相切。
如果Crsquo;rsquo;isin;cRrsquo;rsquo;是点Cisin;cR的第二个图像,我们可以很容易地构造它的第一个图像Crsquo;:
- 令n表示穿过C的R的表面法线。由于圆cRrsquo;rsquo;是R的第二轮廓,nrsquo;rsquo;是包含CRrsquo;rsquo;的直径。
- 因为n是轮廓点w.r.t中的曲面法线。第二投影平行于该投影的平面,因此其第一投影nrsquo;是水平线。
- 由于R是旋转的表面,所以n必须在点N中与b相交。以这种方式,n的第一图像nrsquo;以及C的第一图像Crsquo;被固定。
上述结构也产生了cR的简单参数化。令p表示a和b的公共垂直度,并令A为p和a的交点,即轮心。我们用d和delta;来表示a和b的距离和角度,并引入一个坐标系S:={A;ex,ey,ez},其第一和第三单位向量ex和ez分别在a和p上。作为参数,我们使用p和n之间的角度u。在图2的帮助下,我们得出结论
(2)
作为cR的参数化。由于两轴a和b是偏斜的,所以delta;ne;infin;是有保证的。
公式(2)告诉我们cR一般是一个有理的四阶空间曲线。例如,通过重新参数化cR。
只有在bperp;a的情况下,cR是一个半径为r的普通圆。这种类型的车轮在文献中通常被称为“瑞典车轮”。
图2右侧给出了由两个分支组成的曲线cR的印象。它具有圆柱体Z的轴线a和a和b的共同垂直p作为对称轴。因此,a和p的共同垂直q也是cR的对称轴。该曲线在点P(0,0,-r),P(0,0,r)中与p相交,并且如果delta;1=plusmn;pi;2,则具有发生器g1,2,...,z=0,y=plusmn;r的Z作为渐近线。轴b和cR在b和Z的公共点相交。
由于的情况下曲线cR由两部分组成,对于辊表面R也是如此。图3示出了由穿过P的cR的分支产生的R的部分。卷R是具有轴线b和对称平面sigma;到p并且与b正交的旋转表面。b和p的共同点B是R的对称中心。圆ePsub;sigma;到P且在B中心是R上的赤道,这意味着它有局部最大半径,即r-d。两点K1,2是R上的圆锥形结。
备注:在上面的结构中使用的表面法线n与y线的无限线上的线a,b和线相交。因此,如果,他们在双曲抛物面P上建立了一个发电机组。可以很容易地检查P
坐标系的y轴是P的轴,A是它的顶点。P上的第二台发电机组由平行于xy平面的线组成。因此,P在xy和yz平面无穷远处的两条线上无限远地与平面相交。曲线cR是P和圆柱体Z的交点曲线。从这个事实中,我们可以再次看到(以纯几何的方式)cR是具有上述渐近线的有理四阶曲线。cR的奇异点是x轴无穷远处的点Xinfin;,因为该点是圆柱体R的顶点,同时位于抛物面P上。在Xinfin;中P的切平面tau;是xy平面并且在其奇异点Xinfin;中以cR的两条切线g1,2与圆柱相交。
作为由有理曲线产生的革命表面本身也是合理的。如果,则R的代数阶是8,即其生成曲线cR的阶数的两倍。在的特殊情况下,辊子表面R是子午圈cR在K1,2中与其轴线b相交的环面。
当然,对于Mecanum轮的物理滚动,只有R的一部分位于结K1,2之间。
为了获得辊子表面R的合适表示,我们使用新的坐标系,原点为B,x轴x*=b,新的z轴与旧的一致(图3)。W.r.t.这个系统的曲线cR有参数化
图3.辊子表面R
(3)
通过围绕x*轴以角度v旋转,我们发现
(4)
作为R的参数化。
假设y*=0,将它代入(4)的第三行之后,与第一行一起产生位于xz平面(参数u)中的辊子的子午线曲线mR的参数化,我们得到,
(5)
更确切地说:(5)是子午曲线两个分支之一的参数化;另一个分支与第一个分支对称。轴的旋转轴b=x*,通过改变平方根前面的符号来获得其参数化。
3.通过圆环逼近辊子
正如我们在前面部分看到的,Mecanum轮的滚动表面R是由四阶空间曲线cR生成的8阶代数。辊子表面的自然参数化(公式4)及其子午线曲线(公式5)可用于精确地制造辊子。但由于辊子材料通常具有柔韧的橡胶涂层,因此使用不太复杂的表面就足够准确。例如,可以用适当的圆锥曲线或合理的自由曲线来近似子午线曲线。作为一个例子,我们将为辊子R构造一个逼近环面T。
问题1:构造一个带有轴线b的圆环T,使得T和滚动表面R沿着赤道圆eP接触的次数为2。
由于相对于eP的平面sigma;的对称性,所需环面T的中心必须是点B。图4左边示出了x*z*平面内的情况:两个子午线圈之一在该平面中的R必须在P处接合滚动子午线mR(公式(5))。让我们用mT来表示这个子午线圈。反之亦然,如果mR和mT在P中有k阶接触,对于沿eP生成的曲面R和T同样如此。
图4.构造近似圆环的两种方法。
mT的公式可以设置为
(6)
这里r1和rm表示中心圆l和环面子午线mT的尚未知的半径。
通过将(5)代入(6)我们得到函数
(7)
因为曲线mR和mT都是对称的。z*f是一个偶函数。因此,奇数阶的所有导数都在u=0处消失:
对于rl,rm的任意值,这是正确的。
现在我们确定rl和rm,这样两个附加条件
得到满足。解决方案是
(8)
(9)
对于r1和rm的这些值,在u=0时,f的所有导数达到阶数3为零。因此,环点的辊子午线曲线mR和子午圈mT在点P中具有阶数3的接触。沿共同的赤道eP产生的旋转表面也是如此:
定理1:中心圆lsub;sigma;(中心B,半径rl=dsin2delta;)和子午圆半径rm=r dcot2delta;的圆柱面R和同心圆环T沿着它们的共同的赤道圆eP。
在瑞典轮子(delta;=plusmn;pi;2)的情况下,环面T和辊子面R是相同的。如果特别是delta;=plusmn;pi;4(主要发生在实践中的情况)圆环的半径是
rl=2d,rm=r d
定理1说,靠近它们的共同赤道eP,环面T近似于辊子表面R.图4左边显示了滚动子午线mR和环面子午线mT。另一方面,这个数字还表明,在距离P的某个距离处,近似值并不令人满意。因此,如果Mecanum轮配备更大长度的轮,对于其子午圆mT〜与P相切的mR近似的近似值使用环面T可能是有利的,并且还包含另一个Q的mR(图4右侧)。点(Q)可以在公式(5)的帮助下计算。Te沿eP的近似顺序仅为C1,但在外部区域可获得更好的近似值。
4.麦克纳姆轮的运动学
我们考虑一辆在水平地面上行驶的车辆,并配备像Mecanum车轮一样的车轮(图1右)。让我们分析某个时刻t的其中一个车轮的情况(图5)。涉及四个系统:地形Sigma;0,车辆Sigma;1,车轮Sigma;2和辊子Sigma;3,此时在特定点C(接触点)接触地面。请注意,此点始终位于车轮轴线a的下方Sigma;2:它是Sigma;0中车轮轴线a和滚动轴线b的正交投影的交点。只有在b处于水平位置的情况下,C位于轮心A的下方。
对于分析描述,我们选择Sigma;1中的任意点O1(“车辆中心”)作为坐标系S1的原点:={O1;e1x,e1y,e1z}与车辆Sigma;1连接,x轴和y轴平行于地面。轮心A可以具有x和y坐标ax和ay w.r.t.S1和alpha;可以表示e1x和车轮轴线a之间的角度。然后
是a的方向向量。滚转轴的方向矢量b取决于车轮的旋转角度u,如下所示:
图5.具有麦克纳姆轮子的车辆的速度。
W.r.t.S1的接触点C具有x和y坐标
在下面的考虑中,我们可以忽略z坐标,因为出现的速度矢量都平行于xy平面。
令omega;为运动的角速度Sigma;1/Sigma;0(车辆/地面),vO1,01=(vx,vy)T为时刻t时运动的速度矢量。然后,接触点C(cx,cy)w.r.t.的矢量速度。运动Sigma;1/Sigma;0如下3
运动Sigma;2/Sigma;1(车轮/车辆)是围绕轴线a的简单旋转,因此,该运动的速度矢量为C
其中是Sigma;2/Sigma;1的角速度
运动Sigma;3/Sigma;2(辊子/车轮)是围绕b的旋转。因此,C的瞬时矢量速度vC,23垂直于b(公式(10)):
运动Sigma;3/Sigma;0(辊子/地面)的C的速度矢量vC,03必须为零,因为(被动)滚动在地面上移动而不会滑动。使用合成运动速度的可加性规则,我们可以得到条件
(12),(13),(14)替代产生
通过消除lambda;我们得到微分公式
规定车辆运动与车轮转动之间的联系。这个公式中的项bx,by,cx,cy是根据公式式u的函数。(10),(11)和u本身当然取决于时间t。
如果我们在全球范围内研究这个动议,情况就会相当复杂。当一个滚轮与地面接触时,接触点C从车轮的第一侧移动到第二侧。转弯时,下一卷C再次跳回第一面。由此可见,由(u),cx(u),cy(u)表示的bx(u)是具有与轧辊变化相对应的跳跃不连续性的函数。4
这就是出于实际目的5,假设平均接触点C位于轮心A下方。通过这种简化,我们可以将,公式中的cx=ax,cy=ay带入公式(15)。然后我们获得
该公式允许计算给定车辆速度数据vx,vy,omega;的(近似)车轮速度。
4.1示例:具有三个Mecanum轮子的车辆的运动学
作为一个例子,我们研究了一个配备三个车轮中心Ai(aix,aiy)和轮轴角度alpha;i,i=1,2,3的Mecanum车轮的情况。如果我们用omega;i表示车轮的相应角速度然
全文共8698字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[14542],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 2.3港口吞吐量预测外文翻译资料
- 使用多标准移动通信分层遗传算法的阻抗 匹配网络的宽带优化外文翻译资料
- 移动RFID标签阅读与非重叠串联阅读器在输送带的应用外文翻译资料
- 利用数字图像进行的全场应变测量方法外文翻译资料
- 自然灾害中并发事件的多种应急资源的分配外文翻译资料
- 基于主机的卡仿真:开发,安全和生态系统影响分析外文翻译资料
- 实现基于Android智能手机的主机卡仿真模式作为替代ISO 14443A标准的Arduino NFC模块外文翻译资料
- 探索出行方式选择和出行链模式复杂性之间的关系外文翻译资料
- 信息系统研究、教育和实践的基本立场及其影响外文翻译资料
- 仓储和MH系统决策模型的设计优化与管理外文翻译资料

