英语原文共 11 页
带二元执行器的蛇形机器人步态拟合
苗云杰、高峰*amp;张勇
中国上海200240上海交通大学机械系统与振动国家重点实验室,
收到日期:2013年6月17日;接受日期:2013年10月21日;在线发布日期:2013年11月29日
由于特殊的物理结构和各种不同的运动步态,蛇形机器人在各种各样的场景中可能比传统的腿或轮式运动设计具有显著的优势。本文提出了一种新型蛇形机器人。以数字驱动的Stewart平台作为其模块,主要致力于模拟各种蛇的步态。阐述了横向波动仿真中的三类拟合算法,并将四个模块的构型拟合算法作为一种通用的二元执行器蛇形机器人步态拟合算法进行了验证。几种典型的模拟步态结果表明蛇形机器人具有良好的机动性。
关键词:二元执行器;冗余操纵器;蛇形机器人;步态拟合。
引文:苗亚杰,高飞,张亚杰。双执行器蛇形机器人步态拟合。中国科技科学研究院,2014,57:181-191,doi:10.1007/s11431-013-5405-0
1 .导言
大多数传统的蛇形机器人设计使用旋转关节来连接模块,导致每个关节的自由度很少,一般小于三个[1]。为了更好地模仿生物蛇的运动和产生稳定的蛇步态,需要每个关节的更多自由度,以及单位长度内的更多模块。但不可避免地会引入大量的耦合电机驱动,不仅使控制策略复杂化,而且增加蛇机器人的体积和重量。所以,每个模块在增加自由度与增加自由度之间存在着矛盾,我们需要简化常规控制蛇形机器人[2]。
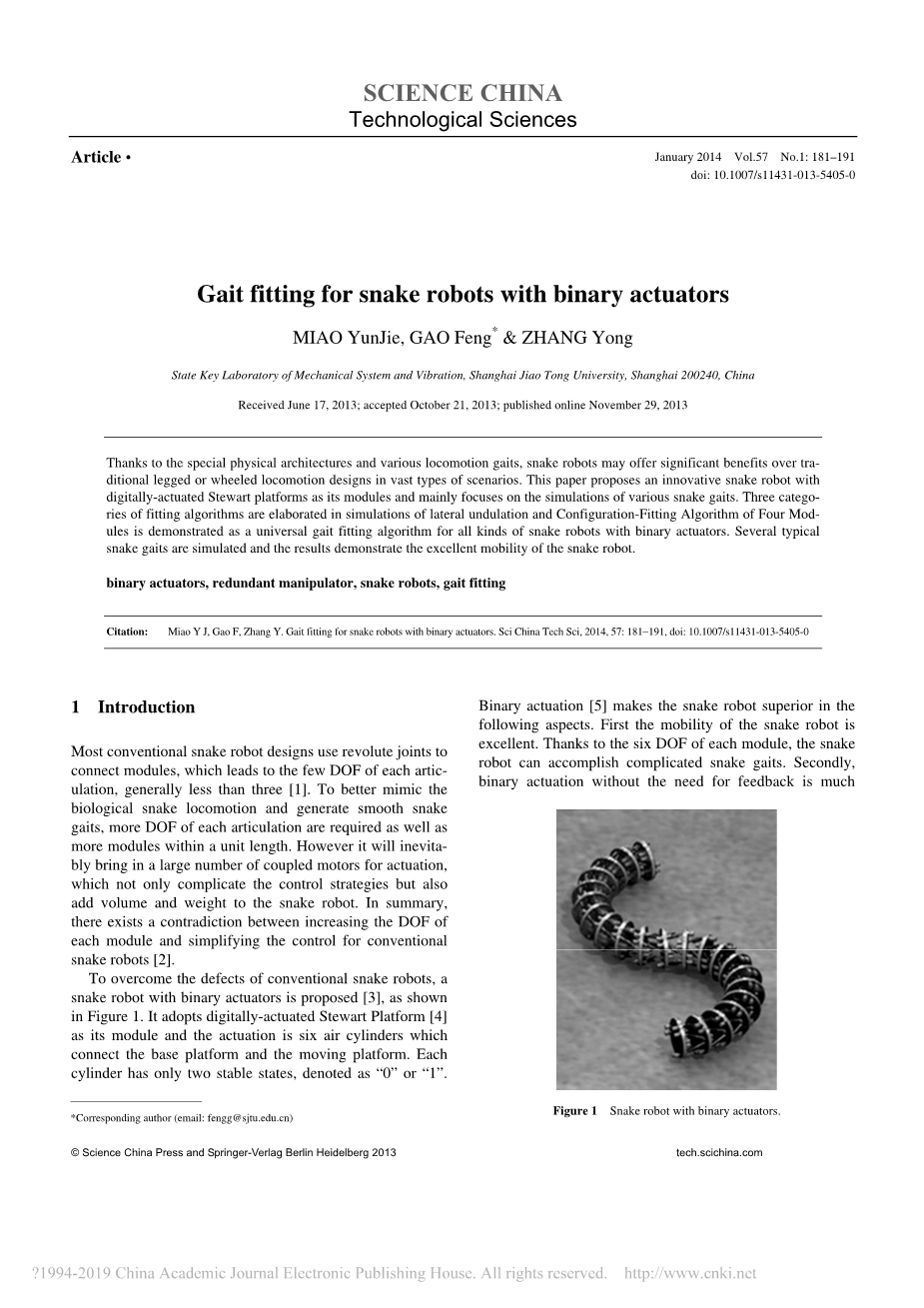
为了克服传统蛇形机器人的缺陷,所以提出了带二元执行器的蛇形机器人[3],如图所示。在图1中。采用数字驱动Stewart平台[4]因为它的模块和驱动是六个气缸,连接底座平台和移动平台。各圆柱只有两种稳定状态,即“0”或“1”。二元驱动[5]使蛇形机器人在以下几个方面有所改善。首先,蛇形机器人的机动性是更好的。由于每个模块的六个自由度,蛇形机器人可以完成复杂的蛇形步态。其次,无需反馈的二元驱动比连续驱动更容易控制,具有精度高、成本低的优点。最后,不使用电机的蛇形机器人可以变得小巧轻便,使其能够在狭窄的地方操作。
图1带二元执行器的蛇形机器人。
我们选择3-3 Stewart平台作为模块。这个平台初始高度为30 mm六个气缸为“0”。三组球形接头每个平台均匀分布在一个圆上。底座平台圆直径为30 mm,底座平台圆直径为30 mm,移动平台为20 mm。
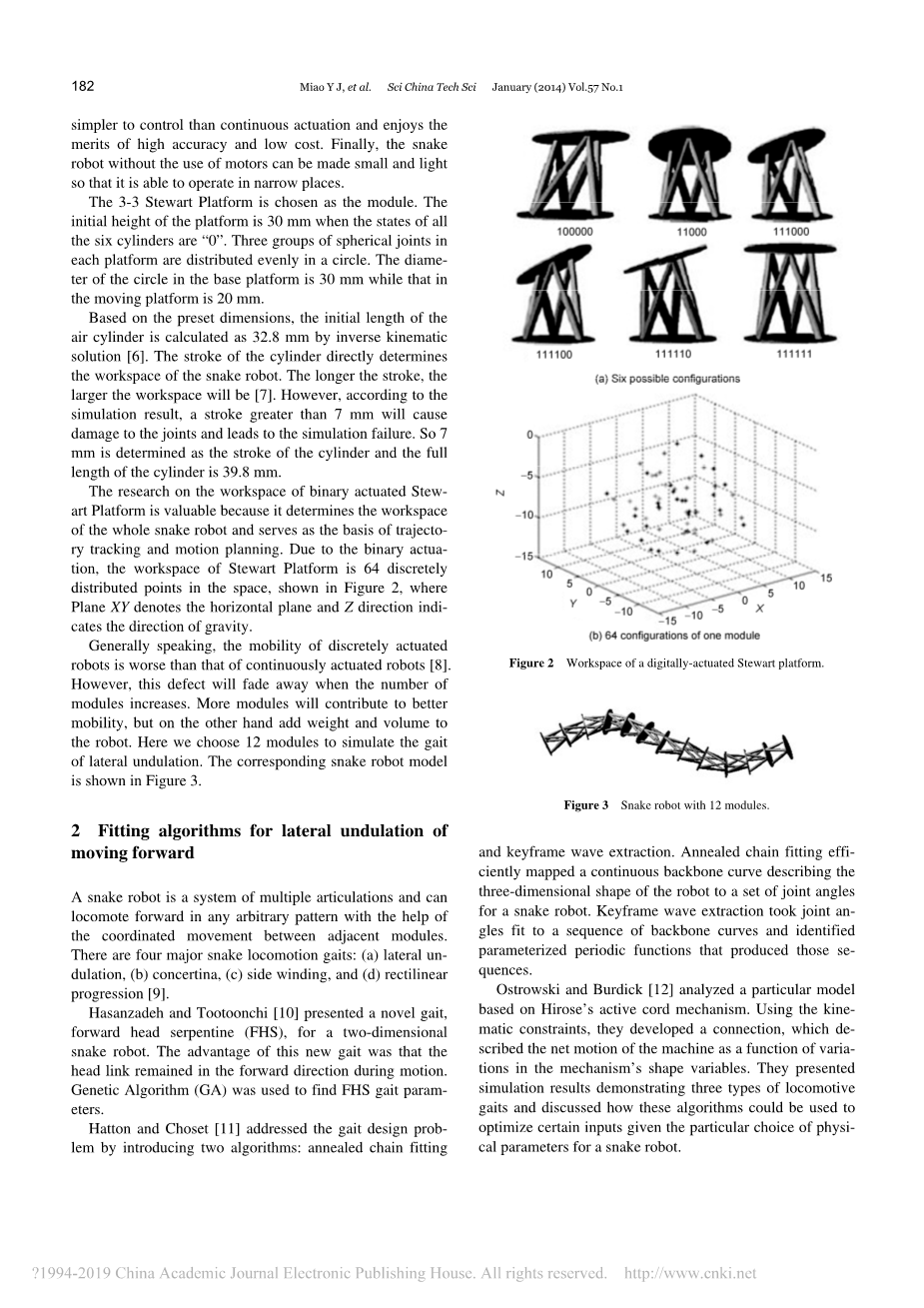
根据预设尺寸,气缸逆运动学初始长度计算为32.8 mm〔6〕。气缸的行程直接决定蛇机器人的工作空间。行程越长,工作空间越大[7]。但是,根据模拟结果,行程大于7 mm将导致接头损坏导致模拟失效。所以气缸行程确定为7mm,全行程气缸长度为39.8 mm。
二元驱动Stewart平台的工作空间决定了其工作空间的大小,因此对其进行研究具有一定的参考价值。对整个蛇形机器人进行跟踪,作为轨迹跟踪和运动规划的基础。对二元驱动,Stewart平台的工作空间中的分布点为64个。如图2所示,其中平面xy表示水平面,z方向表示重力方向。
- 六种可能的配置
(b) 64个模块配置
图2 数字驱动Stewart平台的工作区
一般来说,离散驱动机器人的机动性比连续驱动机器人差[8]。然而,当模块数量增加时,这个缺陷将逐渐消失。更多的模块将有助于更好的机动性,但另一方面,机器人的重量和体积增加。在这里我们选择12个模块来模拟横向波动的步态。相应的蛇形机器人模型如图3所示。
图3带12个模块的蛇形机器人
2.前移横向波动的拟合算法
蛇形机器人是一个多关节系统,借助于相邻模块之间的协调运动,可以任意方式向前运动。蛇有四种主要的运动步态:(a)横向波动,(b)手风琴状,(c)侧曲,和(d)直线前进[9]。
哈桑扎德和祖通[10]为二维蛇形机器人提出了一种新颖的步态,即前头蛇形(fhs)。这种新步态的优点是,在运动过程中,头部连杆保持在向前的方向。采用遗传算法(GA)求解跳高运动步态参数。
哈顿和乔塞特[11]通过引入两种算法来解决步态设计问题:退火链拟合和关键帧波提取。退火链拟合有效地将描述机器人三维形状的连续主干曲线映射到蛇形机器人的一组关节角度。关键帧波提取采用了适合于主干曲线序列的关节角度,并确定了产生这些序列的参数化周期函数。
奥斯托夫斯克和伯迪克[12]分析了一种基于Hirose主动索取机制的特殊模型。利用运动约束,他们发展了一种连接,将机器的净运动描述为机构形状变量变化的函数。他们给出了三种机车步态的仿真结果,并讨论了在蛇形机器人的特定物理参数选择下,如何使用这些算法来优化某些输入。
蛇的步态使它能够爬上一座小山,或者卷起来爬上一棵树。普劳奇和米塔[13]展示了蛇机器人的动态位置控制,并讨论了将头部轨迹约束到一条serpenoid曲线的效果。他们还开发了一个由N个刚性连杆组成的蛇形机器人模型,并提出了几种控制策略,以实现平滑的波动运动和位置控制[14]。
serpenoid曲线[15]是研究横向起伏最常用的模式,已被证明是有效的。因此,选择蛇形机器人模拟运动步态的标准。提出了几种拟合算法来确定某蛇行步态的执行器状态。
2.1 serpenoid曲线的前移
serpenoid曲线的主要特征是曲率沿体轴s呈正弦变化,如下所示。
(1)
这里,s=0是曲线的起点。参数是物体在起点相对于行进方向的角度(称为缠绕角),L是曲线在一个周期内的长度(波长)。重写式(1),我们可以得到x-y平面坐标,如下式所示:
这里=acosacos(b) c.
- B、C系数的不同值会导致不同形状的蛇形曲线,对应于蛇的不同运动步态。图4显示了系数对serpenoid曲线的影响。
图4 系数对serpenoid曲线的影响。(a)a对serpenoid曲线的影响;
(b)b对serpenoid曲线的影响;(c)c对serpenoid曲线的影响。
通过调整系数,可以得到与真实蛇的运动完全一致的蛇形曲线。如图5所示,由于蛇形机器人由12个模块组成, a=/3, b=2, c=0 的serpenoid曲线被平均分成12个部分。将交叉点表示为xi , yi (i 0,,12),在表2中可以找到它们的坐标,这对于步态拟合是很重要的。
图5 有12段的serpenoid曲线
表1交叉点坐标
2.2一个模块的匹配算法
一个模块的拟合算法是最简单的拟合算法,因为每次只考虑一个模块。这类拟合有两种不同的拟合算法,一种是一个模块的位置拟合算法,在拟合过程中只考虑模块的位置;另一种是一个模块的配置拟合算法,考虑模块的位置和方向。
2.2.1一个模块的位置拟合算法
一个模块的位置拟合算法流程图如图6所示。第i个平台中心与第i个曲线顶点
之间的距离可计算为这里由Stewart平台的正向运动学解设定[16]。拟合结果如图7所示。
图6 一个模块的位置拟合算法流程图
图7一个模块位置拟合算法的拟合结果
一个模块的位置拟合算法无法拟合Serpenoid 曲线。从图7中,我们可以看到这个算法找到了第二个模块的最佳位置。
然而,它的方向并不令人满意,从而导致第三个模块的安装失败。第三个模块的64个可能位置都远离目标位置所在的第三个曲线顶点。它要求我们从64个可能的模块中挖掘出模块的最佳配置时,同时考虑位置和方向。
2.2.2一个模块的配置-拟合算法
一个模块的配置拟合算法流程图如图8所示。
图8一个模块的配置拟合算法流程图
有两种方法可以确定在某个顶点的曲线,如等式(3)和(4)所示。将它们分别应用于一个模块的配置拟合算法中,并对结果进行了比较。
表示第i个顶点处的目标坡度。第i个顶点处的目标方向由顶点(i-1)th和(i 1)th确定。所有顶点的坡度都是预先计算好的,可以在表2中找到。
图9 用公式(3)拟合一个模块的配置拟合算法结果
表2 根据等式(3)确定的目的地坡度
拟合结果在开始时很好,但在第八个模块之后,误差开始增加,如图9所示。最后,由于在第十个模块的预设误差极限4 mm内找不到合适的配置,因此拟合算法无法拟合serpenoid曲线。
表示第i个顶点处的目标坡度。第i个顶点的目标方向由第i和(i 1)个顶点确定。所有顶点的坡度都是预先计算好的,可以在表3中找到。拟合结果良好(图10),总误差为31 mm。
表3根据等式(4)确定的目的地坡度
综上所述,一个模块的构型拟合算法在拟合侧向不规则的蛇形步态时是可行的,计算量相对较小。曲线在某一顶点的终点坡度应通过式(4)确定。
图10 用公式(4)拟合一个模块的配置拟合算法结果
2.3多模块位置拟合算法
多个模块的位置拟合算法原则上类似于一个模块的位置拟合算法,但每次都要考虑N(ngt;1)个模块。多模块位置拟合算法流程图如图11所示。
图11多模块位置拟合算法流程图
n个模块共有64n种可能的配置。选择一组配置,使n个模块的总误差最小,可计算为
记下n个模块中所有执行器的状态,然后移到下一个n个模块进行安装。一般来说,一个较大的N会使算法更精确地拟合serpenoid曲线。但计算量随N的增加呈指数增长,因此找到一种适合多模块位置拟合算法的N是至关重要的。
2.3.1三个模块的位置拟合算法(n=3)
三个模块的位置拟合算法考虑了3个模块,确定了每次643个可能配置中的最佳配置组。结果如图12所示。该算法的拟合误差为70mm,蛇形机器人可以大致沿SER-PENOID曲线运动。
图12三个模块位置拟合算法的拟合结果
2.3.2四个模块的位置拟合算法(n=4)
四个模块的位置拟合算法考虑了4个模块,确定了最佳配置组。每次644个可能配置中的个。拟合结果如图13所示。该算法对前四个模块和后四个模块的拟合效果较好,比三个模块的位置拟合算法更为精确。安装误差为33mm是可以接受的。
图13四个模块位置拟合算法的拟合结果
2.3.3更多模块的位置拟合算法(ngt;4)
对于多个模块的位置拟合算法,由于每次都有645个或更多的可能配置,计算量太大,PC机无法计算。虽然这种算法的精度比上述两种位置拟合算法都要高,但在实际应用中还没有多少应用。
总之,多个模型的位置拟合算法牺牲了计算量和计算时间,以获得更好的精度。当n=4时,拟合结果较好,计算量较小。
2.4多模块配置拟合算法
从前面的讨论中我们可以看出,一个考虑了方向性的模块的配置拟合算法可以预测serpenoid曲线的变化趋势,从而保证每个模块的拟合在一个预设的误差范围内。但总误差仍然很大。另一方面,多个模块的位置拟合算法可以为多个模块找到一组最佳的配置,使误差最小化。然而,当定向误差较大时,它有时可能无法拟合serpenoid曲线。因此,我们提出了多模块结构拟合算法,综合了这两种算法的优点。
多模块配置拟合算法流程图如图14所示。在这里,我们选择n分别为3和4,并研究它们的拟合结果。距离误差A主要由试验和误差决定。通常,算法中考虑的模块越多,距离误差就越大,因为误差随着模块数的增加而累积。另一方面,模块的移动性越差,距离误差越大。例如,6-6 Stewart平台的蛇形机器人距离误差大于3-3 Stewart平台的蛇形机器人距离误差。
图14 多模块配置拟合算法流程图
2.4.1三个模块的配置-拟合算法(n=3)
三个
资料编号:[4714]

