英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
基于Wi-Fi的远程监控系统使用Raspberry Pi的受控汽车
Nazirah Ahmad Zaini,Norliza Zaini,Mohd Fuad Abdul Latip,Nabilah Hamzah
电机工程学院
马来西亚莎拉南科技大学MARA(UiTM)
摘要
开发监视和监视系统可以有时会很有挑战性,因为系统应该设计时要考虑要监视的环境。良好的监视系统需要具有动态功能,例如监控可移动并可以在摄像机周围移动的摄像机被监视的区域。需要这种移动的一种情况监视是对具有许多建筑物的大型建筑物的监视级别,这将导致安装多个摄像机的成本很高不少地方。监视如此大的面积也将是对安全人员的挑战,因为他们也需要花费很多时间巡逻各地。其他情况要求动态监视系统包括危险区域,例如有爆炸和火灾危险或受污染的区域与有毒气体。另一个用例包括不能被人类访问。为了应对这些挑战,我们建议基于移动摄像机的动态监控系统通过Wi-Fi遥控车。遥控器(RC)汽车可以在远离汽车的区域内自行移动操作员。用户可以在隔壁房间,隔壁建筑物或
即使在另一个国家,同时控制汽车通过互联网。需要一些感应机制来帮助用户可以有效地定位汽车的当前位置导航。因此,连接到汽车的摄像头也像使用者看到的汽车正视图的眼睛通过浏览器实时进行。该系统仅使用Wi-Fi通信媒介将汽车连接到服务器。网络为用户提供交互界面的应用程序汽车一起还可以提供附近的实时流媒体观看可以通过安装在摄像机中的其他一些CCTV摄像机进行监控区域。
关键字—监控; 树莓派; 遥控车 USB网络摄像头 无线上网。
一,引言
通常设计一个监控系统并根据待开发区域的特征进行构建受监控。例如,对于太危险的区域人类需要一个动态监控系统来代替安全员行事。这包括其中过量存在的易燃液体或气体会容易导致爆炸或起火。在危险的地方,例如这些,设备的安装和特殊技术应还应设计为避免潜在的爆炸和火灾[1]。需要动态和移动的另一个示例场景监视系统的区域太小而无法被访问人类。要监视这些区域,必须有一个监视系统。足够小以适合该区域并具有移动能力穿过狭小的空间。大型建筑物的监视和监视操作还需要动态控制系统。一幢大建筑物是通常由一组安全人员监控。可能有一些团队将离开控制室的时间从一个级别巡逻到另一个级别。假设时间到如果建筑物有,则在任何一级巡逻大约五分钟超过20个级别,大约需要一个小时才能完成在各个级别巡逻。此外,巡逻还需要全天重复。在这种情况下,
动态和移动监控系统可能会导致更多高效的过程。安全人员可能不需要离开控制室,因为它们实际上可以在许多地方巡逻随时通过几个监视器中的不同级别控制室。
关于上述场景,我们在本文中展示了在Wi-Fi上使用的移动监控原型遥控(RC)汽车。遥控车由Raspberry Pi并由用户通过互联网。通过浏览器为用户提供了一个界面观看由安装在汽车上的摄像机捕获的实时视频。还提供了一个控制面板,允许用户远程控制汽车的运动。来自的实时视频流摄像机提供了动态监控视图,可以围绕该区域移动以近距离观察当前可疑事件。总的来说,该原型利用了这一概念物联网(IoT),将控制遥控车通过用户通过网络,而从汽车将通过无线网络发送到在线服务器。
其他相关系统在[15-17]中进行了描述。 [15]提出了一种遥控汽车,可以通过计算机通过并口。用于控制RC车的命令是包括语音和面部命令。 [16]提出了一个RC汽车在Arduino微控制器上设计并由运行Android应用程序的智能手机。在这个项目中RC车是用于在自然灾害的发生。 [17]呈现在机器人上可通过互联网进行监控的车辆。监视车辆可以通过键盘操纵的车辆还安装了机械臂,可用于必要时帮助拾取和移动物体。
二。系统总览
首先将介绍原型设计的概述其次是关于所提出算法的一些细节。对于连接到服务器,系统将依靠Wi-Fi网络,允许数据往返于Raspberry Pi到Web服务器。 Wi-Fi允许RC汽车连接到互联网后,便可以宽带速度访问互联网接入点(AP)或ad hoc模式[14]。 Wi-Fi已经由于Wi-Fi具有所有规格,因此选择了蓝牙该系统所需。例如,Wi-Fi允许一些必要时实施的安全措施,例如一个不是的用户连接到同一网络,因为Pi将无法通过网络界面控制遥控车。这个项目是有限的到仅具有网络覆盖范围并且使用了摄像头的区域只能提供正面视图。A.系统架构在这个项目中,主要的硬件组件运行在RC车的连接如图1所示。这些包括Raspberry Pi,USB网络摄像头,Wi-Fi加密狗,L298 Dual H桥式电动机控制器和RC Car。每个组件是如图1所示。
- Raspberry Pi:Raspberry Pi是一种低成本的信用卡插入计算机显示器或电视的大型计算机,以及使用标准的键盘和鼠标[2]。 尽管很小大小,Raspberry Pi可以处理很多大事情,并且可以运行像台式计算机一样,可以浏览互联网,玩电子游戏和文字处理。 但是,不像其他控制器,几乎与每个控制器兼容编程语言,Raspberry Pi使用了几种高级语言Scratch和Python等语言。
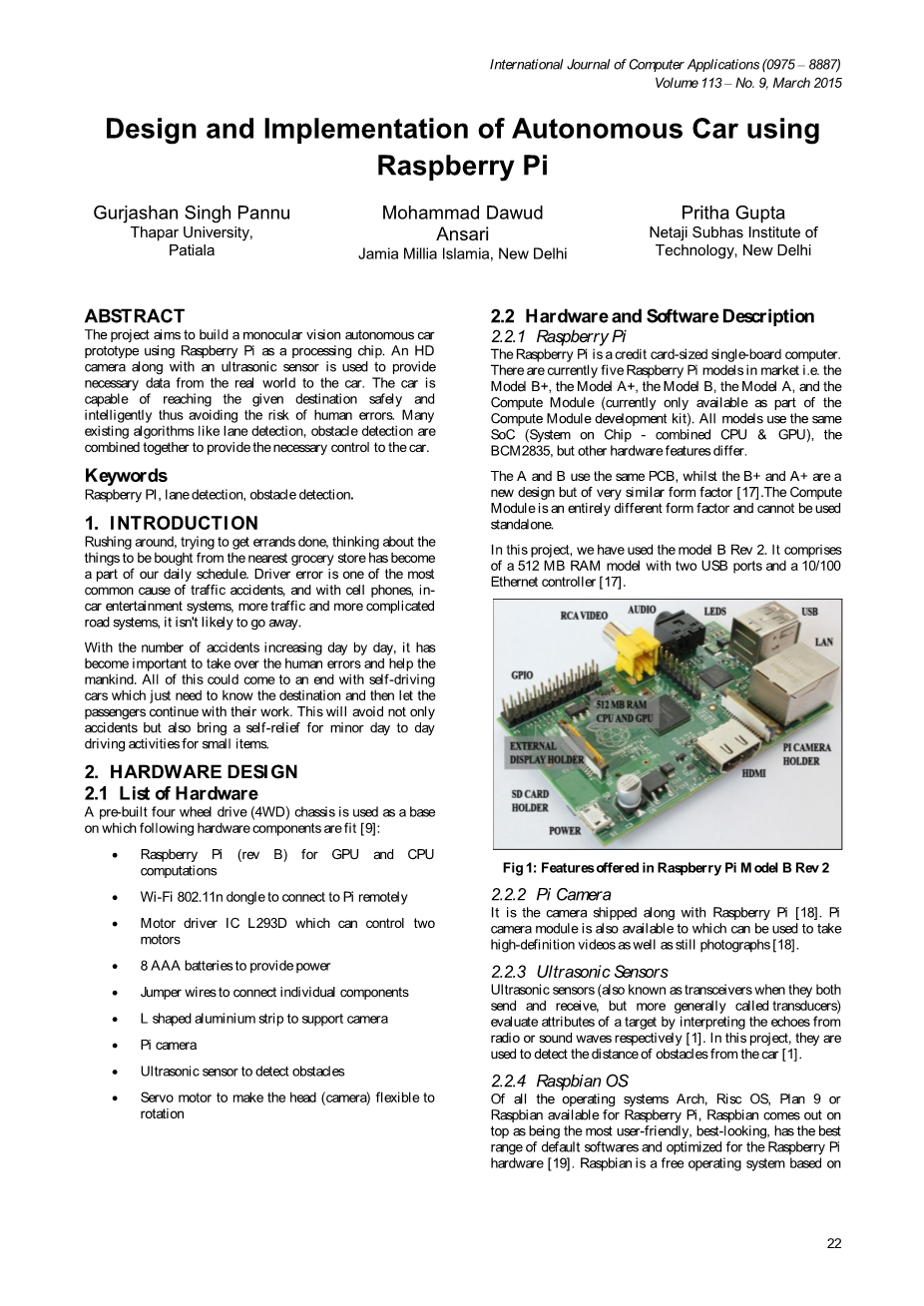
对于此原型,选择了Raspberry Pi而不是其他像Arduino这样的控制器,由于其更高的性能和规范,从而使计算更加密集要部署的应用程序。对于此原型,使用的模型是Raspberry Pi 2 ModelB。图2显示了所提供的功能由Raspberry Pi 2 B型制造。此型号包含900MHz四核ARM Cortex-A7 CPU和1GB RAM和4个USB端口,GPIO引脚,完整的HDMI端口,以太网端口,组合3.5毫米音频插孔和复合视频,摄像头接口(CSI),显示接口(DSI),Micro SD卡插槽和
VideoCore IV 3D图形核心[1]。Pi附加在RC车上,专门用于启用实时视频通过摄像头和汽车遥控器进行流传输通过互联网运动。 Pi将连接到与监视器相同的网络,输出将显示在网络浏览器。
2)相机:用于此原型的相机是USB网络摄像头[5],已连接到Raspberry Pi。
在安装摄像头之前,选择的USB网络摄像头型号为根据兼容Raspberry Pi的USB列表进行检查网络摄像头,以确保它与Pi [3]兼容。将相机连接到Pi上将允许捕获Pi将通过以下方式将实时素材流式传输到InternetWi-Fi连接。实时直播视频通过网页界面供用户查看,例如用于监视或远程控制汽车运动。
3)Wi-Fi连接:要允许Wi-Fi连接,请两个为此原型探索了Wi-Fi加密狗的模型:
无线N 150 USB适配器和TL-WN727N USB适配器。 Wi-Fi加密狗使Raspberry Pi可以连接自动或手动将其分配给用户分配的任何Wi-Fi。USB网络摄像头(与Wi-Fi加密狗一样)也必须是与Raspberry Pi兼容。兼容清单加密狗取自[4]。
- 遥控车电机控制器:用于控制遥控车运动,使用L298双H桥电机控制器,专门控制电动机的速度和方向。的控制器也可以用于其他目的,例如驾驶灯光的亮度,例如大功率LED阵列[6]。
5)电源:Raspberry Pi可以由5V供电微型USB电源,所需电流量为取决于连接到组件的组件的类型树莓派。但是,要运行的理想电流量Raspberry Pi为1.2安培[2]。对于这个原型,使用的电源是Pineng移动电源,提供2安培和5V。充满电的移动电源可以支持Raspberry Pi大约需要1天4个小时(28小时)。
6)无线电遥控车:对于此项目,遥控车
使用的尺寸为18cm x 11cm x 10cm,比例为1:24。它
需要3节AA电池,并有2个电机控制
向前,向后,向左和向右运动。
7)Raspbian Jessie OS:选择运行Raspbian OSRaspberry Pi。 Raspbian是Debian的非正式端口微调,调整了编译设置以生成优化的“硬浮点”代码,将在Raspberry Pi上运行。这为应用程序提供了显着更快的性能大量使用浮点算术运算。尽管Raspbian主要是Mike Thompson的努力(mpthompson)和Peter Green(plugwash),它还具有受益于Raspberry Pi的热情支持希望从以下方面获得最大绩效的社区成员他们的设备[7]。 Raspberry Pi与Raspbian一起安装
Jessie作为其操作系统。
8)Python:Raspbian Jessie的其他特殊功能包括Raspbian附带的几个应用程序的更新。有新版本的Scratch,Sonic Pi和Epiphany网络浏览器以及内置的Python应用程序。因此,Python用户无需安装即可访问文件任何东西[11]。 Python是一个清晰而强大的面向对象编程语言,可与Perl,Ruby,Scheme或
Java,语法非常简洁,并强调可读性。它使用标准的英语关键字。在这个项目中,Python程序将用于从所有GPIO引脚传输数据通向遥控车马达的路。
B.总体活动流程
在服务器上运行的系统的总体活动流Raspberry Pi可以分为几个步骤,如图所示。3.一旦打开Raspberry Pi,Pi将会搜索Wi-Fi访问并自动连接到分配的Wi-Fi。USB网络摄像头将自动开始捕获实时视频。捕获的视频将首先被压缩并发送到Web服务器进行实时流式传输。同时,Pi也将等待用户的远程命令或输入
控制遥控车的运动。
- Web界面流程图图4显示了Web界面的流程图。系统。 访问Web界面后,用户将提示登录。成功认证后,用户将定向到显示实时视频的Web浏览器从遥控车的摄像头 还将向用户提供汽车控制器接口,它持续等待来自用户的命令。根据命令用户,系统将做出相应反应。
D.硬件和软件设计
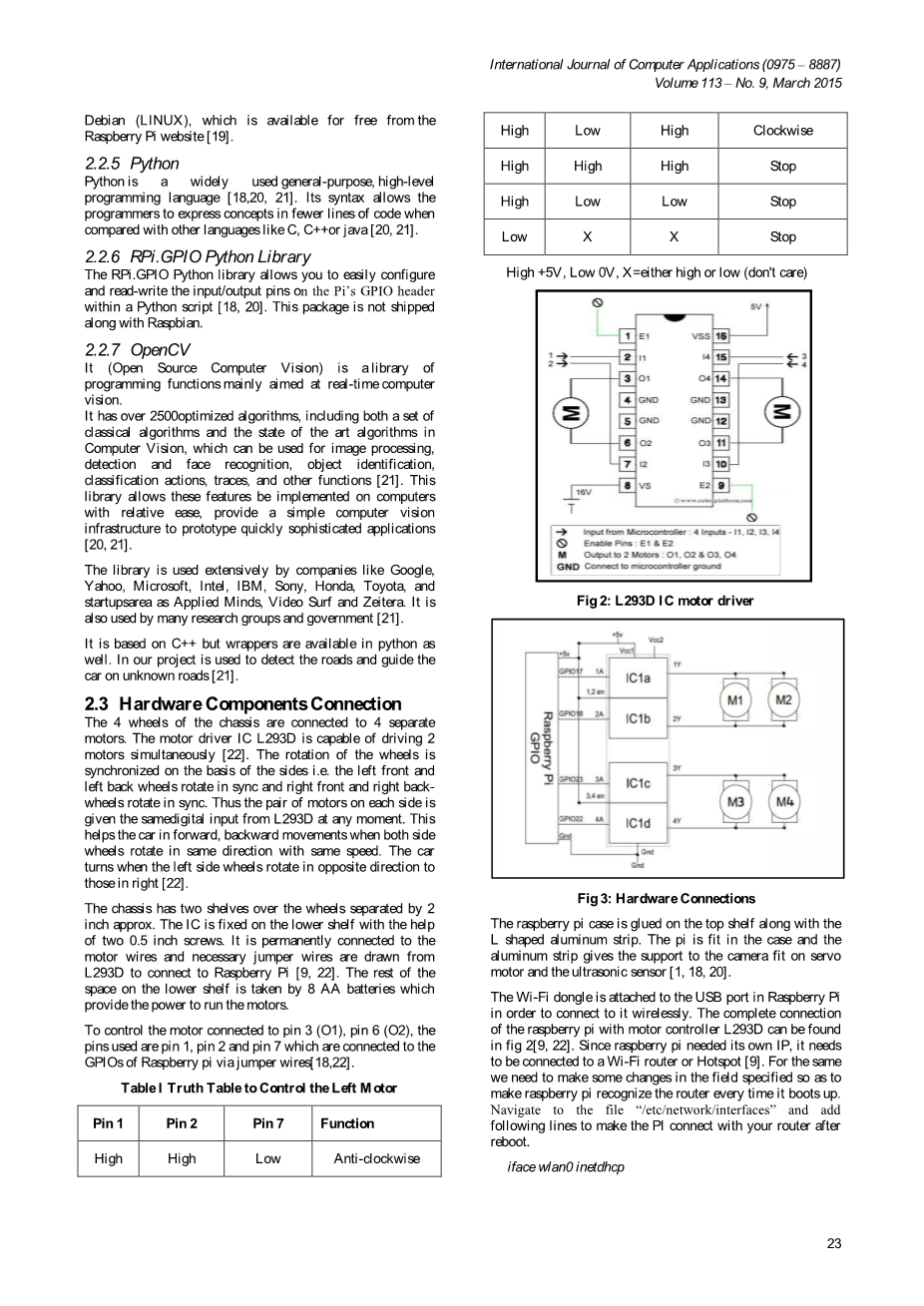
图5显示了RC汽车与汽车之间的连接。树莓派。 遥控车由两个电动机组成,控制前轮; 向左转或向右转,然后向后车轮 向前或向后移动。 使用L298N H桥控制RC Car上的两个电机。 遥控车使用3 AA电池作为电源。 在这个项目中,电源L298N和Pi将分开使用。 但是,可以同时为L298N和Raspberry Pi供电控制器使用一个来源。 RC之间的连接汽车和L298N H桥如图6所示。
三, 系统设置
本节介绍了设置和配置工作将所有组件集成在一起的快照正确集成后,还会显示输出。A.Raspberry Pi安装要设置Raspberry Pi,必须使用多种设备确保每个功能在第一时间都能完美运行时间引导[2]。 表I包含用于Raspberry Pi首先启动。 图7显示了第一个Pi启动该项目。表I.首次启动期间所需的组件
B.Wi-Fi配置Pi已配置为自动连接到选择的Wi-Fi网络。要启用此类Wi-Fi配置,两个文件,特别是网络接口和WPA请求者文件,已使用脚本编辑器进行了编辑。这个项目使用nano脚本编辑器,即GNU Nano,它是易于使用的命令行编辑器的结尾。另外,Pi也配置为具有自己的IP地址。图8显示了Pi与Wi-Fi网络成功连接。 该原型提供了一项特殊功能,即用户可以允许通过Pi的Pi进行远程控制任何地方,或仅来自与Pi相同的网络。有一个允许使用此功能的方法很少。允许用户可以从任何地方访问Pi,端口转发可能是通过配置路由器以转发所有入站流量进行设置从特定端口上的Internet到本地IP地址Raspberry Pi。大多数路由器都具有此功能。但是,每个路由器都有不同的配置。一端口转发的缺点是它暴露了网络专用LAN上的端口连接到公用Internet。这是已知的安全漏洞,必须仔细管理[8]。为了只允许来自同一网络的访问,Pi将是与Weaved App一起安装以启用本地连接的用户通过SSH连接和访问Pi。编织的是软件安装在Raspberry Pi上,允许Pi之间进行连接与Internet上任何位置的任何设备一起使用。 SSH,VNC,HTTP,SFTP文件传输和任何其他正在运行的TCP服务
可以启用Pi上的,以通过Internet安全地进行远程访问没有端口转发[8]。图9显示,一旦编织安装在Pi上,可以从weaved.com上访问互联网。
- 相机安装要启用实时流视频,USB网络摄像头将与Motion一起安装,该程序可以监控来自摄像机的视频信号。 它能够检测是否重大图片的一部分已更改;换句话说,它可以检测运动。 Motion生成的输出可以配置为JPG文件,PPM格式文件或MPEG视频序列[9]。完成所有配置后,实时视频可以直接通过网络链接访问流媒体浏览器。 图10显示了通过网页浏览器。 在此项目中,使用的图像分辨率为默认分辨率,即320px宽和240px高。至提高相机的质量,MJPG Streamer可以安装并使用[9]。 但是,必须设置帧速率正确,否则视频流过快。 另一种方式是为了降低视频的标准帧速率,调整视频大小以及使用更高质量的网络摄像头。
-
使用Python脚本编程可以使用nano编辑器或GUI编写脚本接口。 图11显示了如何使用脚本完成脚本纳米脚本。 编写时应格外小心程序,特别是要确保写入的引脚是与连接的引脚相同。 可以使用的其他工具包括WiringPi,这是用C编写的GPIO访问库Raspberry Pi中使用的BCM2835。 WiringPi包括命令行实用程序GPIO,可用于编程和设置GPIO引脚并读取和写入引脚。 它可能甚至可以用来执行shell脚本的控制[13]。E.网络接口允许访问视频直播和RC汽车控制器,则使用HTML语言设计网络的整个Web界面如图12
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[245837],资料为PDF文档或Word文档,PDF文档可免费转换为Word

