英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
基于飞行员方案的单轴自动跟踪系统控制太阳能电池板优化太阳能提取
Mostefa Ghassoul 巴林大学,工程学院,化学工程系
摘要
目前使用两种太阳能电池板。固定面板;其中它们根据具有固定倾斜角的地理位置以方便的角度放置。但是辐照时间仅仅超过6小时/天。第二种类型是旋转面板,或者通过连续跟踪太阳,或者在预先设定的时间通过预先设定的角度。不幸的是,连续跟踪或预编程这两种方案都是低效的。在第一种情况下,以非常低的速度运行的电机需要高转矩,这需要高电流,导致更大的驱动功率。在第二种方案中,系统独立地以预定的小角度旋转,不管新的位置是否有助于额外的能量。事实上,在驱动系统消耗所有提取的能量的情况下,它可能具有相反的效果。本文介绍了一种解决这两个问题的新技术。该设计使用基于微控制器的控制机制来最大限度地提取太阳能。这是通过设计一个称为PILOT的跟踪系统和一个称为PANEL的细胞旋转系统来实现的。首先,系统朝向东方,等待太阳升起。当这种情况发生时,飞行员继续跟踪太阳。这是通过安装在微型电动机上的光-频转换器(LTF)来实现的。这个转换器总是将PILOT和太阳连在一起。安装了两个相同的光敏电阻(LDR),一个在飞行员身上,另一个在面板上。在每次定位飞行员后,一个比较过程接管。如果飞行员LDR感应的电压大于面板LDR感应的电压加上一个预设的偏移量,面板将自身与飞行员对齐,否则,它将停留在其当前位置,并等待飞行员移动到新的位置,该过程将重复进行。通过这样做,当新位置产生更高的能量时,PANEL才移动到新位置。一天结束时,太阳落山后,系统返回到初始位置,等待第二天。
关键词:太阳能;电池板;试点
1. 简介
随着化石燃料的稀缺及其对环境的变暖效应,以及核能带来的巨大危险,比如1986年的切尔诺贝利核灾难和2011年3月11日日本海岸遭遇15米海啸后的福岛核灾难,尽管被评为高度安全,研究人员一直在寻找安全且成本有效的替代方法。他们把注意力转向可再生能源,如风能、波浪能、热能、太阳能等等。但在所有这些能源中,太阳能可能已经变得更受欢迎,并有更多的机会生存下来,因为它的丰富性和不断降低的成本及其技术的可用性。但是太阳能有几个缺点:直到最近,它的效率相当低。成本相当高,大多数面板都是固定的,因此提取时间仅限于每天几个小时。
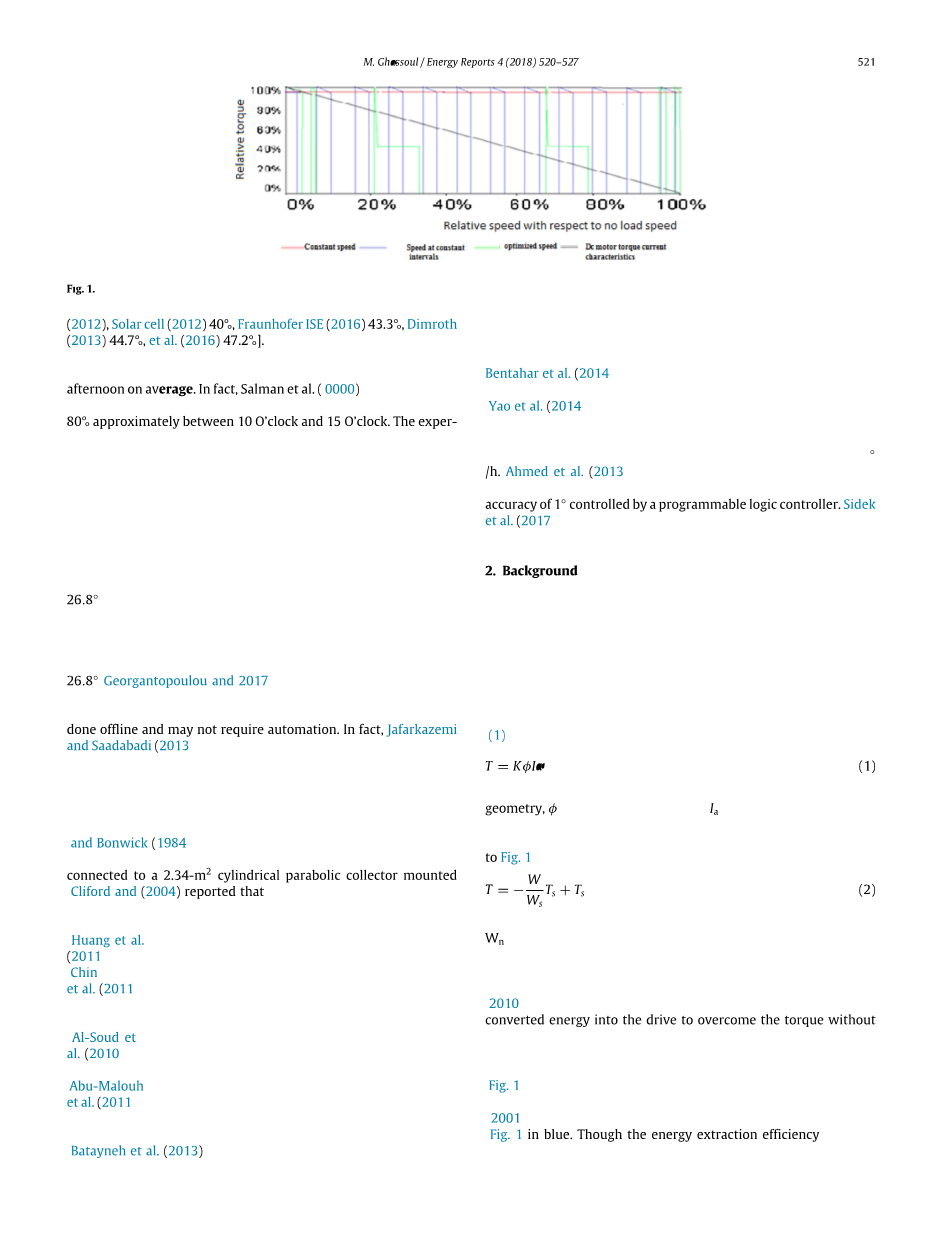
图1 电机速度控制的不同场景
如果太阳能电池板固定在东西方向的中间,提取时间平均大约在下午10点到15点之间。事实上,萨尔曼等人(Sections-Clouds,0000)已经表明,太阳辐射在巴林,大约在10点和15点之间达到80%以上。实验于6月26日仲夏进行。因此,提取的能量非常有限。如果再加上清洁成本,尤其是在像我们这样的多尘地区,要与化石燃料生产的传统能源竞争是相当困难的。要使太阳能具有竞争力,至少需要解决两个问题。一个是在电池方面,科学家必须提出高效率的电池,另一个是在工程方面,工程师必须找到电池的最佳位置。在过去,人们使用太阳能与固定面板之间的地理位置的东西大约26.8°向南方倾斜的角度(在巴林)。研究表明这不是最大化能量提取的理想位置。一个更好的方法是使用单轴或双轴将面板连续朝向太阳。选择单轴的原因如下。正如前面提到的,倾斜角大约是26.8(Georgantopoulou和Vasilikos,2017年)。这意味着,它离赤道不远。这意味着倾角每年只需要调整两到三次。这可以离线完成,可能不需要自动化。事实上,Jafarkazemi和Saadabadi (2013年)建议,在阿布扎比,倾斜角至少每年改变两次,阿布扎比的倾斜角与巴林几乎相同。确定倾斜角度需要另一个需要额外能耗的电机,但这并不重要,因为倾斜角度一年最多可以调整四次。许多研究人员已经发表了他们在这方面的工作。Hession和Bonwick (1984)设计了一种太阳跟踪器,利用连接到安装在一个简单结构上的2.34柱面抛物面收集器的光电晶体管来检测太阳位置。
克利福和伊斯特伍德(2004)报告说,计算机模拟预测效率比固定面板提高23%。他们还声称实验测试显示与计算机模型非常一致。黄等人(2011)开发了一种1轴3位置太阳跟踪光伏,用于测量太阳能光伏系统的日发电量和长期发电量。Chin等人(2011年)设计了一种安装在墙上的紧凑型太阳能跟踪器。该系统在不同模式下运行,以适应天气条件。为了提高能量提取的效率,开发了许多双轴系统。Al-Soud等人(2010年)设计了一种使用双轴跟踪系统的抛物面太阳能炊具。他们显示加热管内的温度达到了90摄氏度。更好的是,Abu-Malouh等人(2011年)报告说,他们建造了一个太阳能烹饪系统,用一个盘子将太阳辐射集中在盘子的焦点上,他们显示盘子内部的温度达到了93摄氏度。Batayneh等人(2013年)采用不同的方法,设计了基于模糊的双轴跟踪系统。尽管从仿真的角度来看,该系统看起来很有前途,但还需要进行实验测试。Bentahar等人(2014年)开发了一种基于光电跟踪的LDRs太阳能跟踪系统。他们报告说获得了可接受的结果。姚等人(2014年)介绍了一项关于多用途双轴太阳跟踪器的研究。跟踪器使用定向时钟安装系统来定位主轴的东西方向。次级以15/h的恒定速度旋转。Ahmed等人(2013年)为太阳跟踪机制开发了硬件和软件。该系统由可编程逻辑控制器控制,双轴跟踪精度为plusmn;1°。Sidek等人(2017年)介绍了一项关于自动定位开环双轴太阳跟踪系统的研究。
背景
尽管通过将太阳能电池板朝向太阳,通过不断旋转太阳能电池板来跟踪太阳,进行了大量的研究来最大限度地提取能量,但仍然存在一个主要问题。也就是说:要旋转成千上万块面板,需要电动机。这些电机吸收非常高的电流以产生高启动扭矩,尤其是在旋转开始时,以克服面板的惯性。众所周知,在DC电机中,只要励磁磁场保持恒定,转矩就与电枢电流成正比,如方程式所示。
其中,T是扭矩,单位为牛顿·米,K是常数,取决于线圈几何,phi;是韦伯中的通量,Ia是电枢电流安培。还可以注意到,为了减小转矩,从而减小电枢电流,需要提高速度。参考图1,扭矩由下式控制:
其中,T是扭矩,单位为牛顿·米,W是转速,单位为弧度/秒,Wn是空载转速,单位为弧度/秒,Ts是失速扭矩,单位为牛顿·米(柯林斯,2015年)。
电机驱动有三种不同的可能情况。第一种情况是以非常低的速度连续驱动面板(Ghassoul,2010)。这可能导致将转换后的能量反馈到驱动装置中,以克服扭矩,而不提取额外的能量,如果没有更多的能量从存储装置反馈回来的话。最重要的是由于高扭矩和高电流对电机的热效应。所以这个选择是不可行的。这在图1中以红色显示,其中电机持续汲取大电流。第二种情况是在固定的时间内将电机旋转一个固定的角度(Ghassoul,2001)。这在图1中以蓝色显示。尽管能量提取效率已经提高,因为驱动马达因此旋转得更快。较小的驱动电流以及大部分时间处于静止状态,能量提取不是最佳的。将面板从当前步骤移到下一步骤并不意味着净额外能量。新的位置可能有助于也可能没有助于更多的能量提取,因为额外的能量(如果有的话)可能被驱动器消耗。这导致了第三种情况,在这里讨论。这种情况是,只有当新位置提供的能量大于消耗的能量并且至少达到预定的偏移量时,面板才移动到新位置。这在图1中以绿色显示。这个方案有两个主要优点:一个是新的位置确实有效地有助于提取更多的能量,并且获得的能量高于消耗的能量。除此之外,正如后面将要展示的,与文献中提到的其他技术不同,我们发现一整天只需要很少的运动。事实上,这项研究表明,在研究发生的地区(巴林),最多不到六次运动就足够了。后一种情况是当前研究的主题。
对于串联激励的DC电机,使用恒定脉冲时的电机能耗由下式给出:
使用跟踪时的能耗:
其中,RT是转子和定子绕组的总电阻,I1s是使用恒定步长时的平均串联电流,I2s是使用跟踪时的电流。因为两种情况下的RT是相同的,并且电机在180度的完整运行中旋转的总运行时间也是相同的,假设两种情况下的速度几乎相同,则可以推断
测量面板峰值电流,发现为1.05安,平均电流为I1s = 0.925安,Is =0 .825安。电流比是:0 .892。两者的电机角速度大致相同情况下,从最大电流到标称电流的转变几乎是线性的。还注意到衰变需要大约0.59秒(图1)。人们注意到,当电机转过小角度时,它永远达不到额定电流。在方程式中取代i1和I2s。E2/E1= 79.54%。这导致高达20%的节能。
设计
要利用光伏装置从太阳获取能量,需要数千个电池,如果不是数百万个的话。这在我们这个空间和能源丰富的地区是可能的。如上所述,固定面板不是解决方案,移动面板必须小心处理。这里提出的方案解决了面板的最佳定位机构的设计,使得最大的能量通过面板的最小移动而被提取,并且不考虑天气条件以及不同季节的一天的长度,通过驱动器消耗最小的能量。在阴天或雨天,无论使用固定面板还是移动面板,辐射肯定会减少;但是所提出的系统不受影响,因为即使在这些极端条件下,由于光检测器允许系统在必要时向后旋转,所以它也能恢复并正确地对准自身。但是这在巴林不是一个大问题,那里很少下雨。该方案由两个子机制组成。
图2 安装在PILOT上的传感机构
图3 最大太阳倾角跟踪系统
图4 检测飞行员LED电压和面板LDR电压之间的电位差
第一个子机制是定位最大能量可以提取的位置,称为PILOT,第二个子机构由太阳能电池板组成,被称为太阳能电池板。基于PILOT方案,通过使用搜索技术来确定位置。PILOT是围绕一个安装在微型电动机上的小传感器建造的,它只消耗很少的能量。跟踪系统如图2所示。最佳照射位置由三个同步工作的探测器确定;一个是TSL235R光频转换器(LTF)和两个低密度脂蛋白受体。LTF将光电二极管和电流频率转换器集成在一个单片集成电路上。它产生一个50:50占空比的方波,频率与光强度(照射)成正比。根据芯片数据表(2007),该器件的设计响应范围为320纳米至1050纳米。该设备有三个主要优点。它不需要任何额外的电路。它可以很容易地连接到微控制器,也可以很容易地编程来跟踪太阳。LTF固定在W形支架的中间尖端,两个ldr位于LTF两侧的槽形中。该系统按照以下时间顺序工作。在太阳升起之前,PANEL和PILOT都指向地理东方,等待太阳升起。为了同步的目的,它们的位置由一个被称为启动接近开关的接近开关确定(参见图3)。PILOT的目标是自由追踪太阳。多亏了光电频率转换器传感器(LTF),太阳的跟踪得以完成。当太阳在其轨道上不断移动时,LTF通过将其转换成频率来监测辐射。因此,PILOT会一直跟随,直到达到最大频率,然后停止。飞行员每次移动时,通过两个相同的LDRs(一个安装在飞行员身上,另一个安装在面板上)将飞行员的感应电压与面板前一位置的感应电压进行比较。这在图4中示出。如果先导传感器的电压比面板的电压大一个预设的偏置值(该偏置是可编程的,因此可以设置为任何方便的值),表明新的位置具有更好的能量提取,比较器的输出变高,中断微控制器以引导面板与先导对准,直到它激活安装在携带先导的管内壁上的开关,它停止。开关只是一个微型限位开关,固定在中空支架的内壁上,支架上装有面板。激活时,面板旋转,直到它接近飞行员,此时宏开关由安装在携带飞行员的杆上的小销激活。然后,PANEL停止工作。如果比较器没有变高,表明新位置没有贡献更多的能量提取,面板停留在旧位置,飞行员继续搜索,程序不断重复。为了使跟踪有效,三个传感器安装在飞行员身上;两个LDRs和一个TSL235R光频转换器。如图2所示,左LDR的作用是当太阳在左侧时定位太阳,所以飞行员向左旋转;当太阳在右边时,右边的传感器定位太阳,所以飞行员向右旋转。中间传感器(TSL235R)通过将最高可能的辐射转换为最高可能的频率,使飞行员始终准确地面对太阳。这种技术在阴天特别有用,因此该系统可以区分因未对准或阴天造成的辐射减弱。如果是因为云的缘故,在云消散后,如果飞行员与太阳同步,它会继续跟踪,但是如果飞行员使太阳前进,它会通过向后旋转来调整自己,并再次与太阳对齐,PANEL也是如此。幸运的是,在世界的这个地方,云每年只出现几天。根据weatherspark (Ghassoul,2001),超过93%的时间,天空是晴朗的,更不用说下雨了,那里一年最多下不到9.9天的雨(Light of frequency,2007)。所以云不是大问题。因为不同季节的白天长度,这已经被跟踪系统计算在内,在跟踪系统中,无论白天长度如何,系统都不会越过太阳。然而,为了确保在跟踪失败的情况下,一个限位开关被放置成正好面向地理上的西方,称为晚上开关,从180°开始。这样做是为了避免系统在短时间内超越轨道。当飞行员按下开关时,整个系统停止运转,等待太阳落山。在这种情况下,整个系统转向东方,等待第二天的到来,这个过程重复进行。该系统的美妙之处在于,只需要一个驾驶员就能驱动大量的太阳能电池。图5以及下面的流程图显示了全天跟踪系统的时间顺序,包括阴天的可能性。
显示一天中跟踪顺序的流程图
图5 全天系统时间表
电动机
为了让面板跟踪飞行员,采用了特殊的设计,如图6所示。飞行员安装在一个非常轻的小杆上,插
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[245836],资料为PDF文档或Word文档,PDF文档可免费转换为Word

