
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
CO-OFDM系统中相位噪声估计的自适应子空间方法
MUYIWA B. BALOGUN , (IEEE研究生), OLUTAYO OYEYEMI OYERINDE, (IEEE高级成员),和 FAMBIRAI TAKAWIRA, ( IEEE成员)
威特沃特斯兰德大学电气与信息工程学院,约翰内斯堡2001,南非通讯作者:Muyiwa B. Balogun (bmbalogun@yahoo.com)
摘要:本文研究了一种用于相干光正交频分复用(CO-OFDM)系统的盲相位噪声估计方法。基于子空间方法,提出了一种简单而有力的方法来自适应地估计和跟踪CO-OFDM系统中的相位噪声。随后使用获得的噪声子空间的奇异矢量构造基于前向-后向线性预测技术得出的加权参数,以自适应地估计系统中的相位噪声。此外,引入了可变步长以确保提高性能仿真结果,表明了该算法的有效性和效率。该算法沿着光纤链接在偏振模色散,色散和其他偏振相关损耗所引起的偏振复用CO-OFDM系统中实现。
索引条款: CO-OFDM, OFDM, 相位噪声消除,自适应算法,子空间方法
1.介绍
由于对带宽渴望的网络数据服务的不断增加,高速光网络已变得势在必行。相干光正交频分复用(CO-OFDM)具有几个重要的优点,例如,频谱效率高,灵活性高,并且可以抵抗符号间干扰(ISI)[1]- [6]。然而,相位噪声构成了主要的损害,这降低了CO-OFDM系统的整体可靠性、性能和效率。文献中存在各种方法来估计和补偿CO-OFDM系统中的相位噪声。已经提出了基于导频的方法以及数据辅助方法来进行相位噪声估计[7]-[10]。尽管这些方法很大程度上导致光学系统的高开销,但它们已被广泛使用。射频(RF)方法也已在文献[11]-[12]中提出。使用这些方法,需要预留一些子载波以形成用于RF导频插入的间隙。同样,必须相对于激光线宽优化RF导频的功率。
最近,在文献[13] -[18]中已经研究并提出了许多提供带宽效率的盲估计方法。在[14]中,提出了一种可以使用任何调制格式实现的指导方法。文献[15]指出了另一种基于盲相搜索的方法。[14]中方法的性能由于错误传播而降低,而[15]中的方法需要大量的测试,从而导致较高的计算成本和复杂性。
然而,在本文中,重点是基于子空间跟踪的盲相位噪声估计的实现。提出了一种有效的自适应子空间跟踪方法,并将其用于实际CO-OFDM系统中的相位噪声估计。文献[19]-[29]中有多种子空间跟踪方法。估计关注子空间的直接方法是在观察协方差矩阵上应用奇异矢量分解(SVD)。但是,直接的SVD方法会导致较高的计算复杂度。为了解决这个问题,已经研究并提出了替代方法[20] -[25]。大多数替代方法集中于信号子空间跟踪,而很少关注噪声子空间的估计。直接修改信号子空间以实现低复杂度的噪声子空间跟踪是不可行的。这在现有的噪声子空间跟踪方法中很明显,在这种方法中,高度不稳定和效率低下是不可避免的[26] -[29]。
[30]中指出的快速数据投影方法(FDPM)提供了低复杂度,数值稳定且可靠的噪声子空间跟踪。因此,出于本研究的目的,所利用的子空间跟踪方法是基于FDPM的。为了实现FDPM子空间跟踪的自适应实现,为了算法的收敛,必须选择步长。在[30]中,提出了利用归一化步长的方法。因此,收敛速度和算法的整体性能在很大程度上取决于步长的严格选择。为了提高性能,并实现更稳定和快速的收敛,因此本工作建议使用可变步长。此外,为了获得相位噪声的简单自适应估计,使用前向后向线性预测(FBLP)技术引入了预测参数。基于从噪声子空间跟踪算法获得的估计值构造预测参数。
因此,本文的主要贡献包括以下内容:
1.光网络中基于快速子空间跟踪,相位噪声估计的自适应方法的推导与实现。该方法利用作为总OFDM子载波的子集的观察向量,然后自适应地估计在OFDM帧上不断变化的相位噪声。在实际的CO-OFDM系统中推导并研究了所提出的方法,该系统考虑了沿光纤链路的色散和损伤的影响。
2.收敛速度和稳定性是估算任何感兴趣子空间时必须考虑的重要因素。现有的子空间方法通常利用规则的归一化步长,仔细选择这些步长以确保收敛的稳定性和速度。通过在噪声子空间跟踪算法的实现过程中引入自适应步长,可以避免使用归一化步长。在子空间跟踪算法中使用的自适应步长的独特引入确保了更稳定和更快的收敛速度,同时增强了整个系统的性能。
3.为了实现一种基于子空间跟踪算法的初始估计可以自适应地获得相位噪声的简单方法,引入了预测参数。加权参数是使用前向后线性预测(FBLP)技术得出的。FBLP技术与子空间跟踪算法的新颖结合确保了低复杂度,并提高了估计算法的鲁棒性。因此,提出的方法称为SS-FBLP,引入可变步长的情况称为SS-FBLP-VSS。
本文的其余部分安排如下:第二部分介绍了CO-OFDM系统模型。在存在相位噪声和其他相关光纤链路失真的情况下,对采用的CO-OFDM系统进行了建模。第三节讨论了提出的基于子空间的自适应估计方法。第四节介绍了一种飞行员辅助的子空间相位噪声估计方法。第五节讨论了所提出的估计方法的计算复杂性。第六节介绍了拟议的子空间跟踪算法的仿真结果。最后,第七节给出结论。
2.系统模型
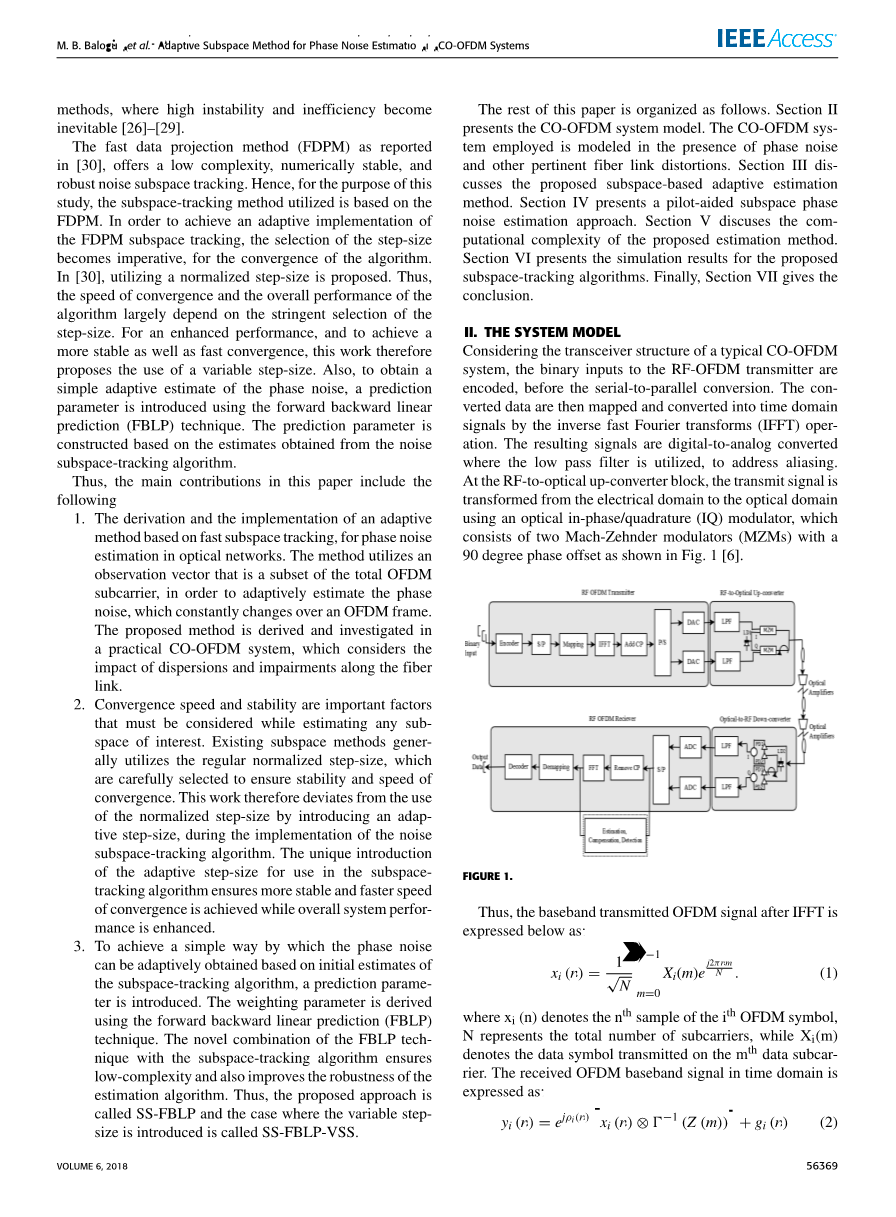
考虑到典型的CO-OFDM系统的收发器结构,在串行到并行转换之前,对RF-OFDM发射机的二进制输入进行编码。然后,通过逆快速傅立叶变换(IFFT)操作将转换后的数据映射并转换为时域信号。得到的信号在利用低通滤波器的情况下进行数模转换,以解决混叠问题。在RF到光学上变频器模块处,使用光同相/正交(IQ)调制器将发射信号从电域转换到光域,该调制器由两个90度的Mach-Zehnder调制器(MZM)组成相位偏移。
因此,IFFT之后的基带传输OFDM信号表示如下:
(1)
其中xi(n)表示第一个OFDM符号的第n个样本,N表示子载波的总数,而Xi(m)表示在第m个数据子载波上传输的数据符号。时域接收到的OFDM基带信号表示为:
(2)
其中0minus;1(·)和otimes;分别代表IDFT运算和圆卷积。串联光学放大器产生的总放大自发辐射(ASE)噪声表示为gi(n),而Z(m)表示包含偏振模式色散以及其他偏振相关损耗的光纤链路的信道脉冲响应( PDL)[31],[32]。因此,Z(m)可以数学表示为[6]:
(3)
其中整个光纤链路中PMD / PDL级联元素的数量表示为M,每个部分由其双折射矢量-→beta;p和PDL矢量-→omega;p表示,如[6]中所述。 Elambda;表示保利矢量,假设对频率的二次依赖性,而empty;(m)是群速度色散(GVD),其表示为:
(4)
如上所述,empty;(m)主要是由于光纤链路失真引起的相移,其中qf表示链路中的色散,fm是第m个子载波的频率,fo是中心光频率。同样,光学系统rho;i(n)中的激光相位噪声被描述为Weiner-Levy过程,可以用数学公式表示为[13]:
(5)
其中s(v)是 瞬时v处的相位噪声,它是高斯分布,均值为零,方差为sigma;2=2pi;hTs,其中h表示发射器和接收器激光器的组合激光线宽,而NCP 表示循环前缀(CP)的长度,Ts是符号周期。
执行FFT以恢复接收到的OFDM信息符号,其表示为[33],[34]:
(6)
其中Bi(m)是由于激光相位噪声引起的失真的函数,可以表示为[10]:
(7)
(8)
近似为:
(9)
它表示相位演化,它对应于第i个OFDM符号上的激光相位噪声的时间平均值,并且将8i视为由[13]给出的公共相位误差(CPE):
(10)
系统中包括干扰在内的总体干扰为:
(11)
(12)
同样,检测器上的有效信噪比表示为[35]:
(13a)
(13b)
(13c)
其中sigma;2x是传输的信息信号的方差,而sigma;2G是ASE噪声的方差而SNR =sigma;2xsigma;2G是不受ICIi(m)影响的原始信道SNR [35]。SNR通过表达式[4]与光学SNR(OSNR)相关。
(14)
其中Bf是中心带宽,而Rs是符号率[4]。
根据(6)-(14)中的表达式,可以分析接收到的信号,并可以估计,评估和补偿相位噪声的影响。
3.提议的基于子空间的自适应估计方法
1.子空间问题
通常通过假设一个条件来解决子空间问题,在该条件下,要估计的参数在整个OFDM帧中保持恒定。然而,这种假设在相位噪声的情况下可能不成立,相位噪声在OFDM帧内不断变化。为了克服自适应估计相位噪声的困难,利用了作为总OFDM子载波子集的观察向量。观测矢量被定义为接收信号的一部分,用长度L表示为Y(j),其中L lt;N。这使得可以在Y(j)上有效地估计频繁变化的相位噪声。 .Y(L j)。因此,相位噪声子空间跟踪问题所基于的观测序列可以定义为:
(15)
因此,考虑接收数据序列Sj的大小为L的非负协方差P,通过对P进行奇异值分解,可以得到以下表达式:
(16)
其中3 = diag {gamma;(1),......gamma;(L)}表示P = E [SjSH j]的奇异值的对角矩阵,其元素是P的奇异值满足gamma;(1)ge;gamma;( 2)ge;.....ge;gamma;(D)gt;gamma;(D 1)ge;.....gamma;(L)ge;0,而U包含元素u(1).... u的对应奇异矢量(L)。可以使用一种简单的正交迭代方法来估计感兴趣的子空间,以获得与矩阵P的奇异值相对应的奇异矢量。由于L表示感兴趣子空间的秩,因此矩阵U(j)的序列由迭代[36]描述。
(17)
其中ornornorm表示使用QR分解的正交过程,并且假设矩阵UH(j)[u(1)..... u(D)]不是奇异的,则
(18)
如上所述,由于目的是估计包含与最小奇异矢量相对应的最小奇异值的子空间,因此提出了正交迭代的两个变体。这些正交迭代方法可确保实现此类估计,还可以实现自适应实现。变体描述如下[36]。
(19)
(20)
其中,mu;gt; 0是步长,相对较小,而IL是单位矩阵。出于这项工作的目的,将采用(20),因为与(19)相比,它具有较低的复杂度,由于矩阵求逆,它会产生较高的复杂度。
为了在P不可用的情况下实现自适应实现,需要顺序获取接收到的向量,并且可以用满足条件Ehcirc; Pji = P的自适应估计circ; Pj替换矩阵P。然后,使用正交迭代过程来计算与其奇异值关联的奇异矢量。自适应正交迭代算法表示为:
(21)
上面使用的参数micro;代表恒定步长。但是,为了获得更好的稳定性和收敛速度,使用了自适应步长micro;(j),定义为[37]:
(22)
其中erf(x)= 2radic;pi;Rx0 eminus;sigma;2part;sigma;,表示误差函数运算。 自适应步长的变化率由调整因子delta;和alpha;控制,而tau;j= Bj -Bj-1是误差项。另外,mu;(j)的范围为0 lt;mu;(j)lt;2gamma;(1),其中gamma;(1)是协方差矩阵的最大奇异值。 而且,假定0 lt;erf1-e-alpha;|tau;j| lt;1,则delta;的范围在边界0 lt;delta;lt;2gamma;(1)内。
2.预测参数
由于使用自适应迭代方法获得了U(j),因此利用其对应的带有向量[u(1)..... u(D)]的L列来构建预测参数W。为了实现这一点,采用了基于[38]中的前后线性特性的最小范数解的方法。 使用估计值U(j)的奇异值和奇异矢量,得出预测参数与协方差矩阵之间的关系。因此,考虑由列向量Wj描述的线性预测参数:
(23)
其中[.] T表示转置且Dle;L。利用前后方向的预测参数,预测方程式可表示为[38]:
(25)
因此,(23)-(24)中表达式的最小范数解表示为:
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238096],资料为PDF文档或Word文档,PDF文档可免费转换为Word

