英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
四旋翼式无人机的设计与构造:初步结果
Rejane Cavalcante Saacute;sup1; and Guilherme A. Barreto
Andreacute; Luiz C. de Arauacute;jo and Antonio T. Varela
Department of Telematics
Department of Teleinformatics Engineering
Federal University of Cearaacute; - UFC
Campus of Pici, Fortaleza, Brazil
Federal Institute of Cearaacute; - IFCE
Fortaleza, Brazil
sup1;rejanecsa@gmail.com
摘要
在本文中,我们介绍了从零开始的四旋翼型无人机(UAV)的建设过程,该车的特点是四个转子负责产生垂直和水平运动,其设计应当还能提供额外的有效载荷运输功能。我们详细说明了用于其构造的主要组件以及用于室内飞行测试的动力学模型和结构。其构建的主要理由是拥有一个复杂的用于现实世界评估控制算法的平台。
- 引言
四旋翼型无人机是一种由四个转子推动的直升机,相邻刀片反向旋转方向,不需要尾桨来抵消螺旋桨的角动量,作为耦合动力系统,通过改变电机速度其位置也变了。如[1]中所述,该系统未充分激活且非常不稳定,在许多情况下,我们希望系统能够尽可能地小并实现较大的垂直运动和水平运动。无人机的应用经常集中于军事领域,监视、检查传输线和配电;低成本的拍摄和电影业,体育赛事,作物的全景摄影牧群监控等等。其具体的特点包括:例如垂直飞行能力和低速飞行,能够让四旋翼执行通过其他机制和结构等难以执行的任务。
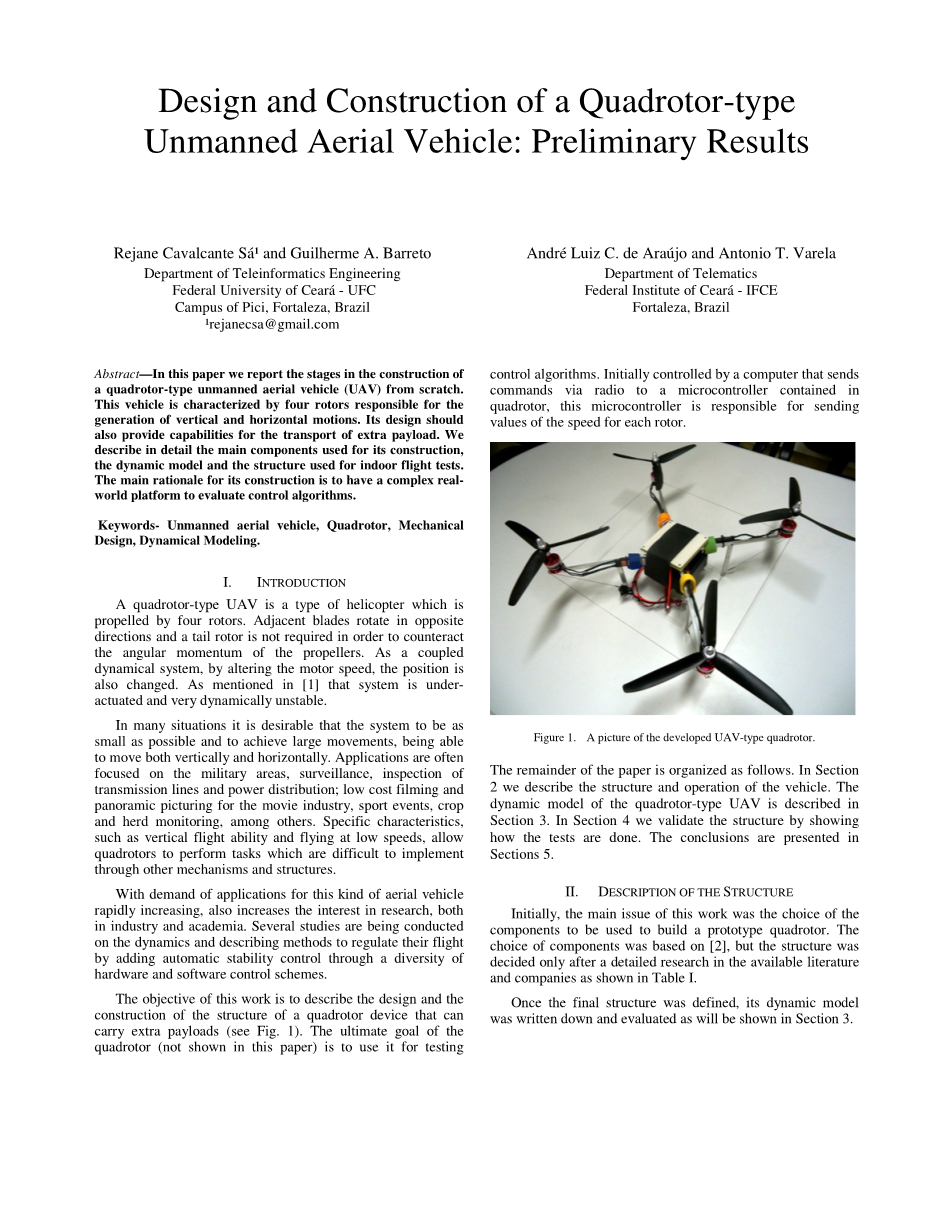
随着对这种飞行器的应用需求迅速增长,在工业界和学术界也增加对其研究的兴趣,在动力学并描述调节飞行的方法中通过多种硬件和软件控制方案添加自动稳定性控制的多项研究也正在进行中。这项工作的目的是描述一种四旋翼装置的结构的设计和构造。携带额外的有效载荷(见图1)。
图1.研发的无人机型四旋翼飞行器的图片
四旋翼飞行器(本文未显示)的最终目标是将其用于测试控制算法。最初由一台计算机控制,该计算机通过无线电将命令发送到包含变频器的微控制器,该微控制器负责为每个转子发送速度值。
在本文的其余部分安排如下。 在第2节中,我们描述了车辆的结构和操作。第3节介绍了四旋翼型无人机的动力学模型。在第4节中,我们通过显示测试的完成方式来验证结构。 结论见第5节。
- 结构说明
最初,这项工作的主要问题是选择用于构建原型四旋翼的组件。组件的选择基于[2],但是结构只有在对现有文献和公司进行了详细研究之后才决定,如表I所示。
表I.书面形式的Quadrotor的AUV项目清单
|
项目 |
形状 |
|
Draganflyer E4 |
|
|
AR.Drone |
|
|
X-4 Flyer |
|
|
STARMAC II |
|
|
OS4 |
定义完最终结构后,将写下并评估其动态模型,如第3节所示。
A.可用的结构和项目
其他地方有一些四旋翼型无人机结构,有些是出于商业目的(例如娱乐)而开发的,有些仅用于研究目的。
仅举几个例子,Draganflyer四旋翼[3]在R / C Toys网站上出售,也已用于学术研究。Parrot AR.Drone [4]出售用于娱乐,可通过电话远程控制,包含多个视频游戏并使用增强现实。在澳大利亚开发的X-4 Flyer也被用于许多研究和一些研究人员中[5]。STARMAC(用于多智能体的自主旋翼飞机斯坦福试验台)已经在第二版中。 在[6]中描述了其工作的新版本,其中包括改进的传感器,转子和新的电子系统。OS4设备是由瑞士的研究人员开发的,并在国际会议上发表了许多论文[1]。
许多其他类似的四旋翼型无人机结构正在开发中,并在世界各地的大学和公司中用于研究[2],[7],[8],[9],[10],[11],[12] ,[13]。由于此类四旋翼的设计和构造尚无广泛采用的标准,因此每个感兴趣的研究小组都必须构建自己的设备,特别是如果目标是为控制算法构建测试平台时。
B.动作
四旋翼型无人机由四个执行器驱动。转子由四个电动机和两对螺旋桨组成反向使用。相邻的螺旋桨以相反的方向旋转。 在图2中,我们用黑色箭头说明了螺旋桨的运动方向(宽度与转子的速度成正比)。红色箭头指示整个四旋翼结构的运动方向。
图2.螺旋桨旋转(黑色箭头)和四旋翼产生的运动(红色箭头)的示意图。
转子速度的增加(减小)导致四旋翼垂直向上(向下)移动。放置在同一轴上的两个转子的变化会产生围绕该轴的转矩,从而产生角加速度。
C.四旋翼底盘
该项目的起点是正确设置系统的合适大小和重量。底盘使用以十字形排列的铝型材(条)构造。它们的末端通过钢丝绳连接,以提高整个结构的刚度,并避免使用更多的铝型材,这会使结构更重。
图3.为这项工作开发的类似四旋翼AUV的基本铝结构。 表II中显示了图中突出显示的部分a,b和c的长度。
铝型材的截面形状为U形,用于固定位于结构底侧的四个支撑基座。转子固定在每侧末端的钢筋上,并靠近钢丝绳。选择铝是因为它重量轻(约为钢重量的1/3),耐腐蚀,无磁性,并带有适当的合金元素,非常坚固。铝结构的最终重量为107克。
使用Solid Edge ST3 CAD软件[14]的插件NXNastran进行了Von Mises测试。在测试中,发现铝1060中形成的结构在27 MPa的屈服点开始塑性变形。在此测试中,固定了肢体,使其表面受到重力的作用。
表II. 图3中突出显示的零件尺寸
|
部件 |
长(mm) |
宽(mm) |
高(mm) |
|
a |
486 |
6,06 |
6,08 |
|
b |
10 |
2 |
120 |
|
c |
30 |
6,06 |
6,08 |
D.推进系统
如前所述,四旋翼的推进系统由四个电动机和两对螺旋桨组成。使用的是Emax 2822型无刷电机,许多飞机模型工作人员都以1200 RPM /伏的速度使用了这种电机。该电机重39克,连续使用电流范围为7A至12A。与9英寸螺旋桨配合使用,它可能能够举起700g的负载。
使用GWS制造的HD-9050x3型三叶螺旋桨。两个通常的旋转方向朝一个方向旋转,两个相反的旋转方向(迎角相反)沿相反的方向旋转。
如我们通常推荐的那样,使用Hobby King电子调速(ESC)设备30A来控制电机。ESC输入是频率为50 Hz的标准航空模型信号,其速度根据高逻辑的变化而变化,范围为1-2 ms。在每个ESC的输出端,三个延迟(即PWM)信号馈入每个电机的相位。
表III.四极杆组件的尺寸和重量
|
元件 |
数量 |
尺寸(mm) |
质量(g) |
|
Chassis |
1 |
354x354x120 |
107 |
|
Propeller |
4 |
229 (直径) |
25 |
|
Spinner |
4 |
14 (直径) |
11 |
|
ESC |
4 |
24x45x11 |
19 |
|
Motor |
4 |
28.5x30 |
39 |
|
mu;C Board |
2 |
80x80x25 |
100 |
|
Battery |
1 |
25x35x102 |
179 |
表III总结了用于构建四旋翼结构并对其进行控制的组件的所有尺寸和质量。
E.系统架构作为欠驱动系统,用于海拔和飞行方向的命令由计算机通过无线电发送到连接到微控制器的另一个无线电。它接收数据并向ESC发送命令以驱动电机。系统功能的基本示意图如图4所示。
图4.包括已开发的四旋翼无人机的主要部件的基本示意图。
F.微控制板
集成和优化还取决于处理传感器数据和实时执行控制算法,花费很少的能量并最大程度地节省成本的能力。使用dsPIC30F4011微控制器Microchip系列[15]开发了负责指挥拟议的四旋翼型无人机的电动机的电路。它是一个16位微控制器,可以执行高达120 MIPS(每秒百万条指令)。
最初,我们决定仅使用一个微控制器来执行由无线电发送的方向和高度命令。 然后,我们意识到对于单个微控制器而言,信息量太大,因此需要开发另一个微控制电路来控制和接收来自传感器的数据。然后,以前的微控制器仅负责实现电机的PWM信号(脉冲宽度调制)。
G.沟通
无线电通信系统由两个LPRS(低功率无线电解决方案)收发器模块Easy-Radio ER400TRS [16]组成,它们提供高性能,易用性和双向数据传输的可能性。 无线电使用数字信号以433 MHz的频率发送数据,并具有输出功率和速度可编程数据处理功能。无线电和微控制器配置为以19200比特/秒的传输速度工作。如图4所示,一个无线电位于计算机上,另一无线电位于四旋翼内。计算机软件通过与无线电相连的串行端口发送命令。
H.电力系统
每个四旋翼无人机的缺点之一是驱动四个旋翼需要很高的能量。该系统的电源由一块11.1 V和2200 mAh容量的锂离子聚合物(LiPo)电池提供,可提供大约15分钟的飞行自主时间。LiPo电池比其他类型的市售电池更轻,重量约为179 g。该电池为引擎和电子电路提供电力。
I.传感器
用于四旋翼导航的传感器是三轴加速度计,两个双轴陀螺仪和声纳。陀螺仪和加速度计用于检查倾斜姿态控制所需的轴和声纳,用于检查结构的高度飞行。三轴加速度计的信号由飞思卡尔[17]的集成电路MMA7361L型MEMS(微机电系统)的支撑板处理。加速度计的输出X,Y和Z是三个分开的模拟电压,其中心电压为电源电压的一半,3.3V。沿轴的正加速度会增加电压,并用于检查结构在两个轴上的倾斜度。
LPR510AL双轴陀螺仪还需要MEMStype板。 每个陀螺仪可以在plusmn;100度/秒和plusmn;400度/秒的范围内运行。灵敏度范围用于将结构导航到plusmn;100度/秒,以检查三个轴上的角速度。使用的另一个传感器是LV-MaxSonar-EZ3超声波测距仪[18]。该传感器以2.5 cm的分辨率检测0到6.45 m范围内的物体。声纳具有三个输出接口,所有这些接口均被同时激活,即:数字脉冲长度输出,模拟电压输出和异步串行数字输出。该传感器用于位于车辆中央的输出模拟量。
- 四旋翼无人机的动力学
A.牛顿-欧拉模型
许多研究人员采用不同的方法得出四旋翼型无人机的数学模型。在[1]中,作者用数学方法描述了四转子的非线性动力学模型,该模型在本工作中被采用。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[254228],资料为PDF文档或Word文档,PDF文档可免费转换为Word

