
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
三维铁路轨道移动激光扫描点云的自动提取
作者:杨必胜,方莉娜
刊名及期次:IEEE JOURNAL OF SELECTED TOPICS IN APPLIED EARTH OBSERVATIONS AND REMOTE SENSING,VOL.7,NO.12,DECEMEBER,2014
起止页码:4759-4761
摘要:自动化铁路轨道提取需求是由维护和为铁路工程更新铁路轨道的基础地理数据的重要性驱动的。保证铁路的快速三维测绘技术的移动激光扫描(MLS)提供了一个很好的手段来沿着走廊捕捉细节,包括轨道、悬丝间隙、天然障碍物(如树木和岩石表面)、和隧道/桥梁间隙。本文展示了一个自动化的方法来从MLS点云中检测轨道。几何和铁路轨道的强度数据都运用到提取轨道点和模型轨道。实验进行了基于Optech的天猫移动制图系统捕捉的测试数据集来评估所提出的方法的有效性,证明它从MLS点云提取三维轨道的一个有前途的解决方法。
关键词:强度特性、移动激光扫描(MLS)、模式识别、扫描路线、轨道提取
一、介绍
关于铁路基础设施像轨道、电线、塔、标志和铁路环境中的站台的精准地理空间数据在公共运输部门有着至关重要性。现有的数据集和物体的数字实现的更新有着至关重要性[1]。一个主要的重点已经在轨道上。轨道对轨道运作、系统安全、列车速度优化、运动行为和乘客的舒适度的各方面有着很大的影响。需要频繁测量保证一个好的铁路维护来避免铁路轨道变形或者不安全的状况。目前,运行铁路安全检查和维护已经通过耗时现场检查或者半自动生成视觉分析图像和视频数据实施了[2]、[3]。基于图像获取通常需要好的照明状态(如白天和气候)。在差的情况下,它不能提供物体的精确的几何信息。
近几年出现了光检测(LiDAR),提供了在很短的操作时间里获取物体的准确三维的优势[4]。在精度、分辨率、属性和自动化方面,他们有一些比传统数据获取来源更好[5]。在大的城市环境和自然资源评估方面,机载激光扫描(ALS)的数据在数字高程模型(DTMs)、数字表面模型(DSMs)和数字地形模型(DTMs)显示了巨大的潜力[4]、[6]。现在进行了大量的研究探索来从ALS数据里检测大量的物体如建筑[7]-[9]、路[10]和树[11]。根据对目标物体的远距离扫描器,经典的ALS系统有一个限制的精度,并且不能描述相对小型号的物体如铁轨。安装在缓慢和低飞行交通工具如直升机、无人自动化工具(无人机)的激光扫描器可以提供更高的采样精度(10到30点每),可以收集高度精确和密集的高程测量[12].
这些检索铁路基础设施信息的数据合理性已经被Neubert et al[13]和Beger et al[1]测试和通过了。
作为对激光扫描的替代平台,移动激光扫描(MLS)系统为收集铁路走廊数据提供了一个更准确和代价效应的选择[14]。相比较ALS,一个MLS系统被期望能提供高的决议、方便移动和低成本路线走廊绘图和模型[15]。和MLS系统中的优势作比较,自动化算法和软件工具对于从MLS数据中有效地分割和提取对象的兴趣已经落后了,主要是由于巨大数据栏目(数十亿),在几何特征的大小差异、变量点密度、复杂的和不完整的场景结构,和移动物体的闭塞特性[16]。为了更经济效应地展示在大规模区域里大规模的点云,几个调查将点云分成连续的道路截面[17]、[18],或投影网格[19]、[20]。利用建模的几何结构、空间分布和密度的点[20]、[21]],将复杂的物体如道路、建筑物和树模型化。许多算法三维点的解释包括通过法向量或纹理来基于聚类分类[22]、[23],三维脚腕基于传输分类[24],[25],和随机样本的基于共识(RANSAC)的分类[19]、[26]。大量的研究试图通过分割成三类来解释三维点云,(1)表面(地面、岩石和三大个箱子);(2)线性结构(电线、细树枝、道路边缘和铁路)和(3)多孔卷(树叶和草)[27]。这三类对应可以捕捉自然环境的可变性的三个几何基元。特别地,一些研究以及提取了线性特性,比如断裂线,边缘,步,从线和MLS数据的边界线。Briese介绍了半自动化方法的特征方法建模[28]。相比较自动地检测的序列点沿特征线,这种方法在手动设置过程的基础上利用了特征线增长的方法。在[29],潜在的路边石的位置被小高度地面上跳跃检测到了。除了高程数据,为了提取道路边缘,点云分析基于数据如斜坡、脉冲宽度、距离的车辆。不同线路提取算法的比较已经在Nguyen等人中呈现了[30]。
大部分的上述点云的解释的方法是基于点云的几何和空间关系。仅仅基于视图的几何点的物体检测在MLS数据中是不够的,例如,薄分支通常是与两边相同形状的交集相混合,栅栏的底部上的点被错误地提取作为类似的点是由于相似的几何模式[31]。但是由不同表面材料构成的有相似形状的不同物体,导致相对独特的颜色和反射强度信息。反射强度的使用,这通常是大体可以从许多MLS系统中获得,可以帮助对象的分类和和贴标签任务。在[32],l路标通过分段强度图像来从MLS数据中提取出来。接着,形态操作被用来确保一个适当的大小的分段。由激光传感器的长距离引起的道路边缘的强度衰减和更大角度通过安装一个沿剖面的二阶曲线拟合值来减少。Kumar 等人提出了一个基于GVF和气球参数活动模型的结合的理论来从MLS数据中提取道路边缘[5]。强度数据形成一个作为有用信息反射GVF图像去提取农村公路,由草地土壤构成道路表面和边缘是不容易通过斜率定义。在[33],强度变化被用来区分人行道的斜坡。在城市道路环境下,人行道一般都有反射构成的表面,然而山坡上都被不同的物体充斥,比如,草、灌木和砾石可能表现相反。杨等人已经证明激光雷达强度是最好的单一从路表面识别路标的方法[34],根据构成路的材料特点满足定义的最小和最大强度的阈值。
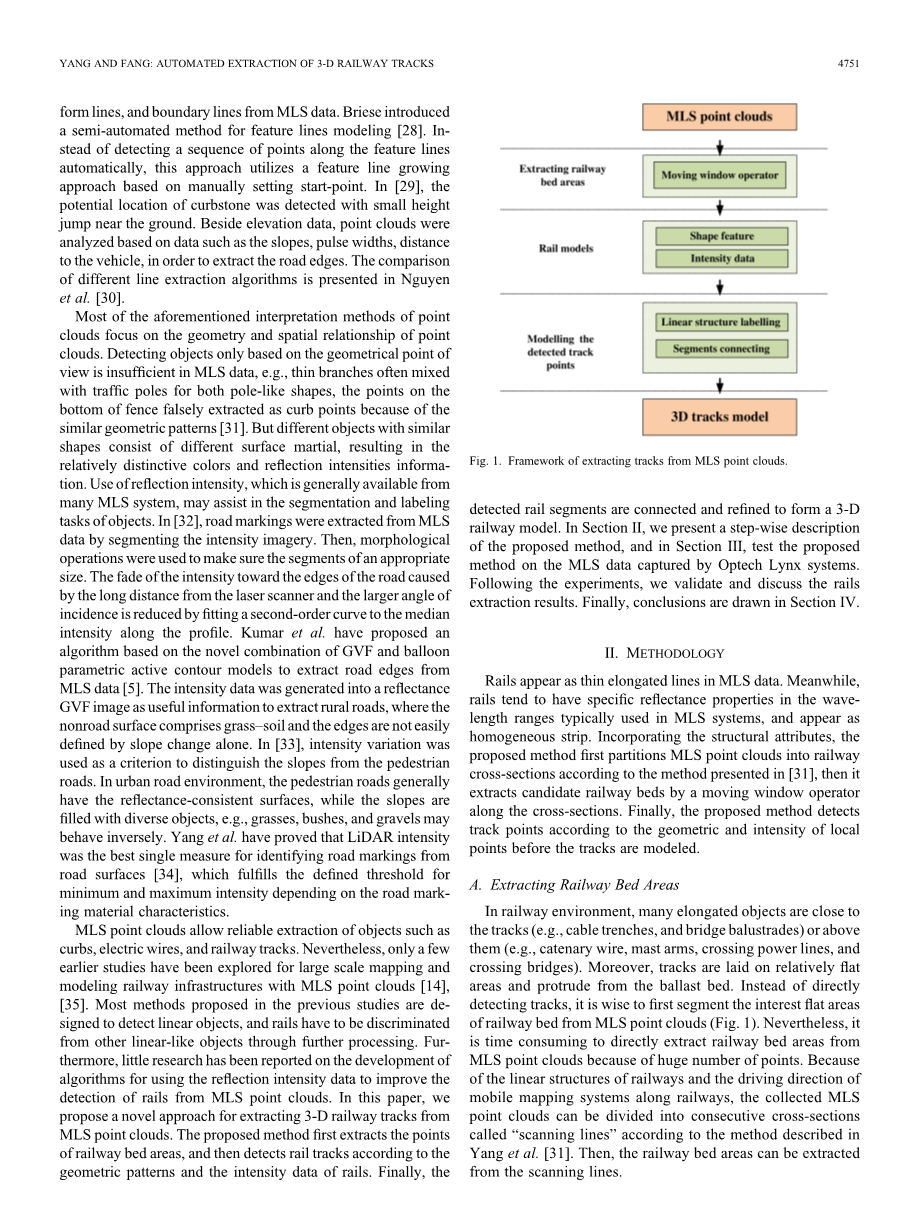
MLS点云允许可靠地对象如萃取、电线和铁路。然而,只有很少早期的研究已经探索了大规模映射和铁路基础设施用MLS点云建模[14]、[35]。大多数先前的研究方法都是为了检测线性对象和铁路已经通过处理从其他类似线性物体区别开。此外,一些研究已经报道了使用了反射强度数据来提高从MLS点云中检测铁轨的算法的发展。本文,我们提出了一种新颖的从MLS点云中提取三维铁路轨道的方法。提出的这个方法首先提取铁路床区域的点;然后根据几个图案和铁路数据的强度数据检测了铁路轨道;最后,检测了的铁轨段被连接和重新定义来形成一个三维铁路模型。在第二章节,我们展现了提出方法的渐进的描叙;在第三章节,在Optech Lynx系统上获取的MLS数据上测试提出的方法。接下来实验,我们验证和讨论提出结果;最厚,在第四节得到结论。
二、方法
铁路在MLS数据上像细长的线条呈现。同时,铁轨往往在MLS系统里有波长范围有特定的反射特性以及作为均匀线条出现。合并结构属性,该方法首先根据在[31]中提出的方法,将MLS点云分区成铁路交叉部分;然后它通过一个沿截面的移动窗口操作器来提取候选轨道床;最后,在轨道被建模之前,该方法根据点几何和强度检测轨道点。
A、提取铁路床区域
在铁路环境下,许多细长的物体接近轨道(如电缆战壕和桥梁栏杆),或者以上(如悬链线、桅杆手臂、穿越电线、穿越桥梁)。此外,追踪被放在相对平坦的区域和道床的突出部分。而不是直接检测轨道,从MLS点云中首先将铁轨床平坦区域分段是明智的。然而,从MLS点云中直接提取铁轨床区域是很耗时间的,这是由于点的数目巨大。由于沿着铁路移动的绘图系统的行驶的方向和铁路的结构,收集到的MLS点云可以被分成连续横断面图,根据杨等人描述的方法这叫做“扫描行”。然后,铁轨床可以从扫描行中提取。
大体上,扫描行显示了在铁路走廊上的物体空间模式。与散射点所指的物体(如树)、垂直的物体(如建筑物)的空间模式不同,一个扫描线的压舱物的点都是通过水平线段几何建模的,有一个比地表点允许自由排水更高的海拔高度。为了完成提取道床点,我们实现了一个移动的窗口过滤操作来搜索沿着扫描线的点的跳跃海拔高度。移动过滤操作器有三个沿着扫描线从外到中间滑动的相邻窗口,如图2所示。当移动的窗口过滤器在树的位置移动,再三个相邻的窗口海拔高度的变化显示了无规律的模式;当移动窗口操作器定在建筑物的部分位置,三个相邻窗口的海拔变换显示了相同的模式,即分辨利用增加或减少。当移动窗口过滤器定位在地面,三个窗口的海拔高度变化是轻微的。当移动窗口过滤器定位在图2所示压舱物的边缘,第一个窗口有区别的海拔高度的跳跃,然而,在其他两个窗口的高度变化是轻微的,这暗示了一个长视野线段。三个相邻窗口的过滤器公式如下:
(1)
(2)
(3)
这里,是在窗口1中最大海拔高度变化,和分别是在窗口2和窗口3的偏差。窗口的长度是相同的并且是由在窗口上点()的数目决定的。经验是不止20。
如果点满足以上的规则,这表明它们是在铁轨床的边缘。定位在第二个窗口(蓝色点如图2所示)贴上铁轨段端点的标签。在两个端点之间的点被归类为铁轨床和使用在铁路检测的下一步。
B、铁路模型
在MLS数据,与由石头填满的高反射的道床相比,铁轨上的点显示了线性分布,是因为铁和细长的模式的低反射的特性以及道床的突出。为了发现铁轨位置,我们引用形状和强度的特征来分析点的特征。对于床点的每个点,几何的和强度的特征都是在一个本地三维邻域计算的。邻域的半径通常设置的比铁轨步宽大些。一个点的邻域在尺寸上定义成点验证:
1)形状特征:铁轨是一个特殊的横断面配置稳住(一个不对称的工字梁)为使用设计的(图3)。与邻近的枕木和压载相比,铁轨在头和脚之间有一个重要的高度差和一个特殊的角度。因此,最大高度差异和斜率是用于定位铁路点。在环境,最大高度差异是通过中心点到在最低点的高度差异计算的。为了排除许多相邻的道床有在铁轨点相似高度差异的情形,坡被用来从道床分段。最大距离然后被计算并且有之间的最大距离的点被检测了。在和之间的高度差异使用了最大距离来计算坡的价值。如果阈值覆盖一个铁轨区域已经中心点在于一个铁路头中间的位置,两个提示应该分别满足下面的的约束条件:
(4)
(5)
这里在邻域最小的高度差异阈值。是铁轨头和脚之间的最大的坡。
2)强度数据:点的强度反射大体上是基于对物体的距离、入射角和材料的表面特征。在不同距离(激光的入射角度)的相同材料的反射强度是不同的。因此,当噪声强度没有通过入射角和和范围的归一化,一个在整个数据集中的常数强度阈值不能在分割的轨道床的轨道中工作好。虽然,点的反射强度与激光传感器和物体之间的距离以及激光的入射角度紧紧相连,它主要由当地区域的被扫描的物体的材料影响。在一个小的地点区域,不同的材料有不同的反射强度和基本反射由反射性的材料。在铁路床区域,轨道对黑暗和铁材料表面能有地反射强度,然而静止和碎石对石头材料表面由高的反射强度。因此,当当地区域被轨道和压载点混合了,它有一个更大的强度标准差。相反的,当当地区域仅仅包含像压载点或铁轨的物体,强度标准差就相对小了。为了捕获这个相反的强度属性,一个小的邻域被引入如图4所示。邻域的半径等于铁轨头的宽度。当中心点位于轨道头的中间时,邻域仅仅包含一个铁轨的点。因此,强度包含的标准差有一个小的值,但是包含的强度的标准差有一个大的值,这是由于在当地邻域混合轨道和巩固卧铺或道床点。在中心点位于铁轨边的情形下,由于混合的轨道和道床,有一个更大的值。相反地,当中心点位于道床上,区域和都包含了道床上的点。因此,的值会等于。有和中心点有小强度差异的中的点被视为和中心点有相同的物体类型。如果中心点位于铁轨的中部头,这些点被归类为铁路点,位于灰色部分的轨道头如图4所示。轨道点数目对整个邻域上的点的比例差不多等于轨道到邻域的区域的比例。
所以,关于的、和点强度的属性用来计算来将轨道点和铁轨床点区别开来,当它们满足下列两个规则:
(6)
(7)
这里N是里的所有点的数目,n是里的轨道点数目,S是邻域的区域,是轨道的区域。
基于以上形状和强度指标,以上点被归类为轨道点。同时,上表层的更高的点被归类为铁轨的头部。检测到的点在滤除错误监测点的的情况下,应该被模拟化成为一个铁路轨道模型。
C、模拟检测轨道点
在许多方面,卧铺的边缘被铁路困惑,因为它们显示了像铁轨相似的几何模式。在某些方面,卧铺是由阴暗的森林做成的,表现出它们和铁路一样的反射。因此,卧铺的点被错误提取作为铁轨。许多其他的物体想隧道的边间和碎石被错误提取成轨道是同样的原因。与平面的卧铺和道床不同,由于拉长的几何模式,铁轨显现线性分布。因此,一个线性结构标签是实现过滤虚假铁路点。
1)线性结构标签:原理部分分析(PCA)已经被用来分析点在三维的分布,因而模拟化原理方向和大小点的重心分布变化。让邻域点成为。协方差矩阵的格式依据PCA并且可以写成 (8)
这里
注意M总是对称半正定,因而M有非负特征值。这三个特征值是正的和设置为。对于三维分散点,没有主导方向可以找到。对于一个线性结构,主要方向的曲线的切线。在平面表面的情况下,主要的方向平行于表面正常为。维数的特性为如[36]中描述的、 和推导表明相邻点的形状行为是现行的、平面的或者球面。在[36]中描述的方法
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148125],资料为PDF文档或Word文档,PDF文档可免费转换为Word

